Lorenzo Leonini Étienne Rivière Pascal Felber
University of Neuchâtel, Switzerland
Developing large-scale distributed applications is a highly complex, time-consuming and error-prone task. One of the main difficulties stems from the lack of appropriate tool sets for quickly prototyping, deploying and evaluating algorithms in real settings, when facing unpredictable communication and failure patterns. Nonetheless, evaluation of distributed systems over real testbeds is highly desirable, as it is quite common to discover discrepancies between the expected behavior of an application as modeled or simulated and its actual behavior when deployed in a live network.
While there exist a number of experimental testbeds to address this
demand (e.g., PlanetLab [11], ModelNet [35], or
Emulab [38]), they are unfortunately not used as systematically
as they should. Indeed, our first-hand experience
has convinced us that
it is far from straightforward to develop, deploy, execute and monitor
applications for them and the learning curve is
usually slow. Technical difficulties are even higher when one wants to
deploy an application on several testbeds,
as deployment scripts written for one testbed may not
be directly usable for another, e.g., between PlanetLab and ModelNet
.
As a side effect of these
difficulties, the performance of an application can be greatly
impacted by the technical quality of its implementation and the skills
of the person who deploys it, overshadowing features of the underlying
algorithms and making comparisons potentially unsound or irrelevant.
More dramatically, the complexity of using existing testbeds
discourages researchers, teachers, or more generally systems
practitioners from fully exploiting these technologies.
These various factors outline the need for novel development-deployment
systems that would straightforwardly exploit existing testbeds and
bridge the gap between algorithmic specifications and live systems.
For researchers, such a system would significantly shorten the delay
experienced when moving from simulation to evaluation of large-scale
distributed systems ("time-to-paper" gap). Teachers would use it to
focus their lab work on the core of distributed
programming--algorithms and protocols--and let students experience
distributed systems implementation in real settings with little
effort. Practitioners could easily validate their applications in the
most adverse conditions.
There already exist several systems to ease the development or
deployment process of distributed applications. Tools like
Mace [23] or P2 [26] assist the developer by generating
code from a high-level description, but do not provide any facility for
its deployment or evaluation. Tools such as Plush [9] or
Weevil [37] help for the deployment process, but are
restricted to situations where the user has control over the nodes
composing the testbed (i.e., the ability to run programs
remotely using ssh or similar)
.
To address these limitations, we propose SPLAY, an infrastructure
that simplifies the prototyping, development, deployment and
evaluation of large-scale systems. Unlike existing tools, SPLAY
covers the whole chain of distributed systems design and evaluation. It
allows developers to specify distributed applications in a concise
manner using a platform-independent, lightweight and efficient
language based on Lua [20]. For instance, a complete
implementation of the Chord [33] distributed hash table
(DHT) requires approximately 100 lines of code.
SPLAY provides a secure and safe environment for executing and
monitoring applications, and allows for a simplified and unified usage
of testbeds such as PlanetLab, ModelNet, networks of idle
workstations, or personal computers.
SPLAY applications execute in a safe, sandboxed environment with
controlled access to local resources (file system, network, memory)
and can be instantiated on a large set of nodes with a single command.
SPLAY supports multi-user resource reservation and selection,
orchestrates the deployment and monitors the whole system. It is
particularly easy with SPLAY to reproduce a given live experiment
or to control several experiments at the same time.
An important component of SPLAY is its churn manager, which can
reproduce the dynamics of a distributed system based on real traces or
synthetic descriptions. This aspect is of paramount importance, as
natural churn present in some testbeds such as PlanetLab is not
reproducible, hence preventing a fair comparison of protocols under the
very same conditions.
SPLAY is designed for a broad range of usages, including:
(i) deploying distributed systems whose lifetime is specified at
runtime and usually short, e.g., distributing a large file using
BitTorrent [17]; (ii) executing
long-running applications, such as an indexing service based on a DHT
or a cooperative web cache, for which the population of nodes may
dynamically evolve during the lifetime of the system (and where failed
nodes must be replaced automatically); or (iii) experimenting with
distributed algorithms, e.g., in the context of hands-on networking
class, by leveraging the isolation properties of SPLAY to enable
execution of (possibly buggy) code on a shared testbed without
interference.
This paper introduces a distributed infrastructure that greatly simplifies the prototyping, development, deployment, and execution of large-scale distributed systems and applications. SPLAY includes several original features--notably churn management, support for mixed deployments, and platform-independent language and libraries--that make the evaluation and comparison of distributed systems much easier and fairer than with existing tools.
We show how SPLAY applications can be concisely expressed with a specialized language that closely resembles the pseudo-code usually found in research papers. We have implemented several well-known systems: Chord [33], Pastry [31], Scribe [15], SplitStream [14], BitTorrent [17], Cyclon [36], Erdös-Renyi epidemic broadcast [19] and various types of distribution trees [13].
Our system has been thoroughly evaluated along all its aspects:
conciseness and ease of development, efficiency, scalability,
stability and features. Experiments convey SPLAY's good properties
and the ability of the system to help practitioner and researcher
alike through the whole distributed system design, implementation and
evaluation chain.
The remaining of this paper is organized as follows. We first discuss related work in Section 2. Section 3 gives an overview of the SPLAY architecture and elaborates on its design choices and rationales. In Section 4, we illustrate the development process of a complete application (the Chord DHT [33]). Section 5 presents a complete evaluation of SPLAY, using representative experiments and deployments (including tests of the Chord implementation of Section 4). Finally, we conclude in Section 6.
SPLAY shares similarities with a large body of work in the area of
concurrent and distributed systems. We only present systems that are
closely related to our approach.
On the one hand, a set of new languages and libraries have been proposed to ease and speed up the development process of distributed applications.
Mace [23] is a toolkit that provides a wide set of tools and libraries to develop distributed applications using an event-driven approach. Mace defines a grammar to specify finite state machines, which are then compiled to C++ code, implementing the event loop, timers, state transitions, and message handling. The generated code is platform-dependent: this can prove to be a constraint in heterogeneous environments. Mace focuses on application development and provides good performance results but it does not provide any built-in facility for deploying or observing the generated distributed application.
P2 [26] uses a declarative logic language named OverLog to express overlays in a compact form by specifying data flows between nodes, using logical rules. While the resulting overlay descriptions are very succinct, specifications in P2 are not natural to most network programmers (programs are largely composed of table declaration statements and rules) and produce applications that are not very efficient. Similarly to Mace, P2 does not provide any support for deploying or monitoring applications: the user has to write his/her own scripts and tools.
Other domain-specific languages have been proposed for distributed
systems development. In RTAG [10], protocols are specified as
a context-free grammar. Incoming messages trigger reduction of the
rules, which express the sequence of events allowed by the protocol.
Morpheus [8] and Prolac [24] target network
protocols development. All these systems share the goal of SPLAY to
provide easily readable yet efficient implementations, but are
restricted to developing low-level network protocols, while SPLAY
targets a broader range of distributed systems.
On the other hand, several tools have been proposed to provide runtime facilities for distributed applications developers by easing the deployment and monitoring phase.
Neko [34] is a set of libraries that abstract the network substrate for Java programs. A program that uses Neko can be executed without modifications either in simulations or in a real network, similarly to the NEST testbed [18]. Neko addresses simple deployment issues, by using daemons on distant nodes to launch the virtual machines (JVMs). Nonetheless, Neko's network library has been designed for simplicity rather than efficiency (as a result of using Java's RMI), provides no isolation of deployed programs, and does not have built-in support for monitoring. This restricts its usage to controlled settings and small-scale experiments.
Plush [9] is a set of tools for automatic deployment and monitoring of applications on large-scale testbeds such as PlanetLab [11]. Applications can be remotely compiled from source code on the target nodes. Similarly to Neko and SPLAY, Plush uses a set of application controllers (daemons) that run on each node of the system, and a centralized controller is responsible for managing the execution of the distributed application.
Along the same lines, Weevil [37] automates the creation
of deployment scripts. A set of models is provided by the user to
describe the experiment. An interesting feature of Weevil lies in its
ability to replay a distributed workload (such as a set of request for
a distributed middleware infrastructure). These inputs can either be
synthetically generated, or recorded from a previous run or
simulation. The deployment phase does not include any node selection
mechanism: the set of nodes and the mapping of application instances
to these nodes must be provided by the user. The created scripts allow
deployment and removal of the application, as well as the retrieval of
outputs at the end of an experiment.Plush and Weevil share a set of limitations that make them unsuitable
for our goals. First, and most importantly, these systems propose
high-end features for experienced users on experimental platforms such
as PlanetLab, but cannot provide resource isolation due to their
script-based nature. This restricts their usage to controlled testbeds,
i.e., platforms on which the user has been granted some access
rights, as opposed to non-dedicated environments such as networks of idle workstations where it might not be desirable or possible to create accounts on the machines, and where the nature of the testbed imposes to restrict the usage of their resources (e.g., disk or network usage).
Second, they do not provide
any management of the dynamics (churn) of the system, despite its
recognized usefulness [29] for distributed system evaluation.
A set of experimental platforms, hereafter denoted as testbeds, have been built and proposed to the community. These testbeds are complementary to the languages and deployment systems presented in the first part of this section: they are the medium on which these tools operate.
Distributed simulation platforms such as WiDS [25] allow
developers to run their application on top of an event-based network
simulation layer. Distributed simulation is known to scale poorly, due
to the high load of synchronization between nodes of the testbed
hosting communicating processes. WiDS alleviates this limitation by
relaxing the synchronization model between processes on distinct
nodes. Nonetheless, event-based simulation testbeds such as WiDS do
not provide mechanisms to deploy or manage the distributed application
under test.Network emulators such as Emulab [38], ModelNet [35],
FlexLab
[30] or P2PLab [28] can reproduce some of the
characteristics of a networked environment: delays, bandwidth, packet drops,
etc. They basically allow users to evaluate unmodified applications across
various network models. Applications are typically deployed in a local-area
cluster and all communications are routed through some proxy node(s), which
emulate the topology. Each machine in the cluster can host several end-nodes
from the emulated topology.
The PlanetLab [11] testbed (and forks such as
Everlab [22]) allows experimenting in live networks by
hosting applications on a large set of geographically dispersed
hosts. It is a very valuable infrastructure for testing
distributed applications in the most adverse conditions.
SPLAY is designed to complement these systems. Testbeds are useful
but, often, complex platforms. They require the user to know how to
deploy applications, to have a good understanding of the target
topology, and to be able to properly configure the environment for
executing his/her application (for instance, one needs to use a
specific library to override the IP address used by the application in a
ModelNet cluster). In PlanetLab, it is time-consuming and error-prone
to choose a set of non-overloaded nodes on which to test the
application, to deploy and launch the program, and to retrieve the
results.
Finally, considering mixed deployments that use several testbeds at
the same time for a single experiment would require to write even much
more complex scripts (e.g., taking into account problems such as port
range forwarding). With SPLAY, as soon as the administrator who
deployed the infrastructure has set up the network, using a complex
testbed is as straightforward for the user as running an application
on a local machine.
We present the architecture of our system: its main components, its programming language, libraries and tools.
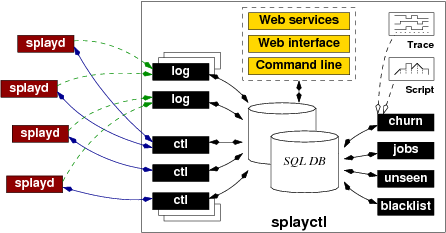
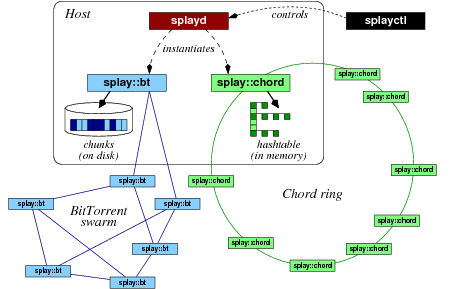
The SPLAY framework consists of about 15,000 lines of code written in C, Lua, Ruby, and SQL, plus some third-party support libraries. Roughly speaking, the architecture is made of three major components. These components are depicted in Figure 1.
![]() The controller,
The controller, splayctl, is a
trusted entity that controls the deployment and execution of
applications.
![]() A lightweight daemon process,
A lightweight daemon process,
splayd, runs on every machine of the testbed. A splayd
instantiates, stops, and monitors SPLAY applications when
instructed by the controller.
![]() SPLAY applications execute in
sandboxed processes forked by
SPLAY applications execute in
sandboxed processes forked by splayd daemons on
participating hosts.
Many SPLAY applications can run simultaneously on the same host. The testbed can be used transparently by multiple users deploying different applications on overlapping sets of nodes, unless the controller has been configured for a single-user testbed. Two SPLAY applications on the same node are unaware of each other (they cannot even exchange data via the file system); they can only communicate by message passing as for remote processes. Figure 1 illustrates the deployment of multiple applications with a host participating to both a Chord DHT and a BitTorrent swarm.
An important point is that SPLAY applications can be run locally with no modification to their code, while still using all libraries and language features proposed by SPLAY. Users can simply and quickly debug and test their programs locally, prior to deployment.
We now discuss in more details the different components of the
SPLAY architecture.
The controller plays an essential role in our system. It is implemented as a set of cooperating processes and executes on one or several trusted servers. The only central component is a database that stores all data pertaining to participating hosts and applications.
The controller (see Figure 2) keeps track of all
active SPLAY daemons and applications in the system. Upon startup,
a daemon initiates a secure connection (SSL) to a ctl
process. For scalability reasons, there can be many ctl
processes spread across several trusted hosts. These processes only
need to access the shared database.
SPLAY daemons open connections to log processes on behalf of
the applications, if the logging library is used. This library is
described in section 3.4.
The deployment of a distributed application is achieved by submitting
a job through a command-line or Web-based interface. SPLAY also
provides a Web services API that can be used by other projects. Once
registered in the database, jobs are handled by jobs
processes. The nodes participating in the deployment can be specified
explicitly as a list of hosts, or one can simply indicate the number
of nodes on which deployment has to take place, regardless of their
identity. One can also specify requirements in terms of resources that
must be available at the participating nodes (e.g., bandwidth) or in
terms of geographical location (e.g., nodes in a specific country or
within a given distance from a position). Incremental deployment,
i.e., adding nodes at different times, can be performed using several
jobs or with the churn manager.
Each daemon is associated with records in the database that store
information about the applications and active hosts running them, or
scheduled for execution. The controller monitors the daemons and uses
a session mechanism to tolerate short-term disconnections
(i.e., a daemon is considered alive if
it shows activity at least once during a given time period)
. Only after
a long-term disconnection (typically one hour) does the controller
reset the status of the daemon and clean up the associated entries in
the database. This task is under the responsibility of the
unseen process. The blacklist process manages in the
database a list of forbidden network addresses and masks; it
piggybacks updates of this list onto messages sent to connected
daemons.
 |
Communication between the daemon and the controller follows a simple
request/answer protocol. The first request originates from the daemon
that connects to the controller. Every subsequent command comes from
the controller. For brevity, we only present here a minimal set of
commands.The
The reason why we initially select a larger set of nodes than
requested clearly appears when considering the availability of hosts
on testbeds like PlanetLab, where transient failures and overloads are
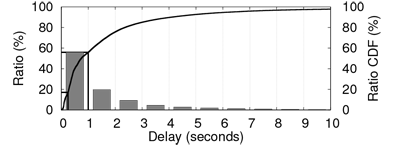
the norm rather than the exception. Figure 3
shows both the cumulative and discretized distributions of round-trip
times (RTT) for a 20 KB message over an already established TCP
connection from the controller to PlanetLab hosts. One can observe
that only 17.10% of the nodes reply within 250 milliseconds, and over
45% need more than 1 second. Selecting a larger set of candidates
allows us to choose the most responsive nodes for deploying the
application.
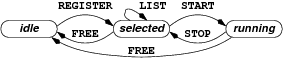
jobs process dequeues jobs from the database and searches for a set
of hosts matching the constraints specified by the user. The controller sends
a REGISTER message to the daemons of every selected node. In case
the identity of the nodes is not explicitly specified, the system selects a
set larger than the one originally requested to account for failed or
overloaded nodes. Upon accepting the job, a daemon sends to the controller the
range of ports that are available to the application. Once it receives enough
replies, the controller first sends to every selected daemon a LIST
message with the addresses of some participating nodes
(e.g., a
single rendez-vous node or a random subset , depending on the
application)
to bootstrap the
application, followed by a START message to begin
execution. Supernumerary daemons that are slow to answer and active
applications that must be terminated receive a FREE
message. The state machine of a SPLAY job is as follows:
SPLAY daemons are installed on participating hosts by a local user
or administrator.
The local
administrator can configure the daemon via a configuration file,
specifying various instance parameters (e.g., daemon name, access key,
etc.) and restrictions on the resources available for SPLAY
applications. These restrictions encompass memory, network, and disk
usage. If an application exceeds these limitations, it is killed
(memory usage) or I/O operations fail (disk or network usage). The
controller can specify stricter--but not weaker--restrictions at
deployment time.Upon startup, a SPLAY daemon receives a blacklist of forbidden addresses
expressed as IP or DNS masks. By default, the addresses of the controllers are
blacklisted so that applications cannot actively connect to them. Blacklists
can be updated
by the controller
at runtime
(e.g., when
adding a new daemon or for protecting a particular machine)
.
The daemon also receives the address of a log process to
connect to for logging, together with a unique identification
key. SPLAY applications instantiated by the local daemon can only
connect to that log process; other processes will reject any
connection request.
In order to fully understand the behavior and robustness of a distributed protocol, it is necessary to evaluate it under different churn conditions. Theses conditions can range from rare but unpredictable hardware failures, to frequent application-level disconnections, as usually found in user-driven peer-to-peer systems, or even to massive failures scenarios. It is also important to allow comparison of competing algorithms under the very same churn scenarios. Relying on the natural, non-reproducible churn of testbeds such as PlanetLab often proves to be insufficient.
There exist several characterizations of churn that can be leveraged to reproduce realistic conditions for the protocol under test. First, synthetic descriptions issued from analytical studies [27] can be used to generate churn scenarios and replay them in the system. Second, several traces of the dynamics of real networks have been made publicly available by the community (e.g., see the repository at [1]); they cover a wide range of applications such as a highly churned file-sharing system [12] or high-performance computing clusters [32].
|
SPLAY incorporates a component, churn (see
Figure 2), dedicated to churn management. This
component can send instructions to the daemons for stopping and
starting processes on-the-fly. Churn can be specified as a trace, in a
format similar to that used by [1], or as a synthetic
description written in a simple script language. The trace indicates
explicitly when each node enters or leaves the system while the script
allows users to express phases of the application's lifetime, such as
a steady increase or decrease of the number of peers over a given time
duration, periods with continuous churn, massive failures, join
flash crowds, etc. An example script is shown in Figure 4
together with a representation of the evolution of the node population
and the number of arrivals and departures during each one-minute
period: an initial set of nodes joins after 30 seconds, then the
system stabilizes before a regular increase, a period with a constant
population but a churn that sees half of the nodes leave and an equal
number join, a massive failure of half of the nodes, another increase
under high churn, and finally the departure of all the nodes.
Section 5.5 presents typical uses of the churn
management mechanism in the evaluation of a large-scale distributed
system. It is noteworthy that the churn management system relieves the
need for fault injection systems such as Loki [16]. Another
typical use of the churn management system is for long-running
applications, e.g., a DHT that serves as a substrate for some other
distributed application under test and needs to stay available for the
whole duration of the experiments. In such a scenario, one can ask the
churn manager to maintain a fixed-size population of nodes and to
automatically bootstrap new ones as faults occur in the testbed.
SPLAY applications are written in the Lua language [20], whose features are extended by SPLAY's libraries. This design choice was dictated by four majors factors. First, the most important reason is that Lua has unique features that allow to simply and efficiently implement sandboxing. As mentioned earlier, sandboxing is a sound basis for execution in non-dedicated environments, where resources need to be constrained and where the hosting operating system must be shielded from possibly buggy or ill-behaved code. Second, one of SPLAY's goals is to support large numbers of processes within a single host of the testbed. This calls for a low footprint for both the daemons and the associated libraries. This excludes languages such as Java that require several megabytes of memory just for their execution environment. Third, SPLAY must ensure that the achieved performance is as good as the host system permits, and the features offered to the distributed system designer shall not interfere with the performance of the application. Fourth, SPLAY allows deployment of applications on any hardware and on any operating systems. This requires a ``write-once, run everywhere'' approach that calls for either an interpreted or bytecode-based language. Lua's unique features allow us to meet these goals of lightness, simplicity, performance, security and generality.
Lua was designed from the ground up to be an efficient scripting language with
very low footprint. According to recent benchmarks [2], Lua is
among the fastest interpreted scripting languages. It is reflective,
imperative, and procedural with extensible semantics. Lua is dynamically typed
and has automatic memory management with incremental garbage collection. The
small footprint from Lua results from its design that provides flexible and
extensible meta-features, rather than a complete set of general-purpose
facilities. The full interpreter is less than
![]() kB and can be easily
embedded. Applications can use libraries written in different languages
(especially C/C++). This allows for low-level programming if need be. Our
experiments (Section 5) highlight the lightness of SPLAY
applications using Lua, in terms of memory footprint, load, and scalability.
kB and can be easily
embedded. Applications can use libraries written in different languages
(especially C/C++). This allows for low-level programming if need be. Our
experiments (Section 5) highlight the lightness of SPLAY
applications using Lua, in terms of memory footprint, load, and scalability.
Lua's interpreter can directly execute source code, as well as hardware-dependent (but operating system-independent) bytecode. In SPLAY, the favored way of submitting applications is in the form of source code, but bytecode programs are also supported (e.g., for intellectual property protection).
Isolation and sandboxing are achieved thanks to Lua's support for first-class functions with lexical scoping and closures, which allow us to restrict access to I/O and networking libraries. We modify the behavior of these functions to implement the restrictions imposed by the administrator or by the user at the time he/she submits the application for deployment over SPLAY.
Lua also supports cooperative multitasking by the means of coroutines, which are at the core of SPLAY's event-based model (discussed below).
SPLAY includes an extensible set of shared libraries (see
Figure 5) tailored for the development of distributed
applications and overlays. These libraries are meant to be also used
outside of the deployment system, when developing the application. We
briefly describe the major components of these libraries.
The
Finally, communication libraries can be instructed to drop a given
proportion of the packets (specified upon deployment): this can be
used to simulate lossy links and study their impact on an application.
luasocket library provides basic networking
facilities.
We have wrapped it into a restricted socket library, sb_socket,
which includes a security layer that can be controlled by the local
administrator (the person who has instantiated the local daemon
process) and further restricted remotely by the controller. This
secure layer allows us to limit: (1) the total bandwidth available for
SPLAY applications (instantaneous bandwidth can be limited using
shaping tools if need be); (2) the maximum number of sockets used by
an application and (3) the addresses that an application can or cannot
connect to.
Restrictions are specified declaratively in configuration files by the
local user that starts the daemon, or at the controller via the
command-line and Web-based APIs.We have implemented higher-level abstractions for simplifying communication
between remote processes. Our API supports message passing over TCP and UDP,
as well as access to remote function and variables using RPCs. Calling a
remote function is almost as simple as calling a local one (see code in next
section). All arguments and return values are transparently serialized.
Communication errors are reported using a second return value,
as allowed by Lua
.
sb_fs,
that wraps the standard io library and provides restricted
access to the file system
in an OS-independent fashion
.
Our wrapped library simulates a file system inside a single
directory. The library transparently maps a complete path name to the
underlying files that stores the actual data, and applications can only
read the files located in their private directory. The wrapped file
handles enforce additional restrictions, such as limitations on the disk
space and the number of opened files.
SPLAY proposes a threading model based on Lua's coroutines combined
with event-based programming. Unlike preemptive threads,
coroutines yield the processor to each other (cooperative
multitasking). This happens at special points in base libraries,
typically when performing an operation that may block (e.g., disk or
network I/O). This is typically transparent to the application
developer.
Although a single SPLAY application will not benefit from a
multicore processor, coroutines are preferable to system-level threads
for two reasons: their portability and their recognized efficiency
(low latency and high throughput) for programs that use many network
connections (using either non-blocking or RPC-based programming),
which is typical of distributed systems programming.
Moreover, using a single process (at the operating system level) has a
lower footprint, especially from a sandboxing perspective, and allows
deploying more applications on each splayd.
Shared data accesses are also safer with coroutines, as race conditions can only occur if the current thread yields the processor. This requires, however, a good understanding of the behavior of the application (we illustrate a common pitfall in Section 4). SPLAY provides a lock library as a simple alternative to protect shared data from concurrent accesses by multiple coroutines.
We have also developed an event library, events, that controls
the main execution loop of the application, the scheduler, the
communication between coroutines, timeouts, as well as event generation,
waiting, and reception. To integrate with the event library, we have
wrapped the socket library to produce a non-blocking, coroutine-aware
version sb_socket. All these layers are transparent to the
SPLAY developer who only sees a restricted, non-blocking socket
library.
An important objective of SPLAY is to be able to quickly prototype
and experiment with distributed algorithms. To that end, one must be
able to easily debug and collect statistics about the SPLAY
application at runtime. The log library allows the developer
to print information either locally (screen, file) or, more
interestingly, send it over the network to a log collector managed by
the controller. If need be, the amount of data sent to the log
collector can be restricted by a splayd, as instructed by the
controller. As with most log libraries, facilities are provided to
manage different log levels and dynamically enable or disable logging.
SPLAY provides a few other libraries with facilities useful for
developing distributed systems and applications. The llenc and
json libraries [3] support automatic and efficient serialization of
data to be sent to remote nodes over the network. We developed the
first one, llenc, to simplify message passing over
stream-oriented protocols (e.g., TCP). The library automatically
performs message demarcation, computing buffer sizes and waiting for
all packets of a message before delivery. It uses the json
library to automate encoding of any type of data structures using a
compact and standardized data-interchange format.
The crypto library includes cryptographic functions for data
encryption and decryption, secure hashing, signatures, etc. The
misc library provides common containers, functions for format
conversion, bit manipulation, high-precision timers and distributed
synchronization.The memory footprint of these libraries is remarkably small. The base
size of a SPLAY application is less than
![]() kB with all the
abovementioned libraries loaded.
It is easy for administrators to deploy additional
third-party software with the daemons, in the form of libraries. Lua
has been design to seamlessly interact with C/C++, and other languages
that bind to C can be used as well.
For
instance, we successfully linked some Splay application code with a
third-party video transcoding library in C, for
experimenting with
adaptive video multicast.
Obviously, the administrator is responsible for providing
sandboxing in these libraries if required.
kB with all the
abovementioned libraries loaded.
It is easy for administrators to deploy additional
third-party software with the daemons, in the form of libraries. Lua
has been design to seamlessly interact with C/C++, and other languages
that bind to C can be used as well.
For
instance, we successfully linked some Splay application code with a
third-party video transcoding library in C, for
experimenting with
adaptive video multicast.
Obviously, the administrator is responsible for providing
sandboxing in these libraries if required.
This section illustrates the development of an application for SPLAY. We use the well-known Chord overlay [33] for its familiarity to the community. As we will see, the specification of this overlay is remarkably concise and close to the pseudo-code found in the original paper. We have successfully deployed this implementation on a ModelNet cluster and PlanetLab; results are presented in Section 5.2. The goal here is to provide the reader with a complete chain of development, deployment, and monitoring of a well-known distributed application. Note that local testing and debugging is generally done outside of the deployment framework (but still, using SPLAY libraries).
Chord is a distributed hash table (DHT) that maps keys to nodes in a
peer-to-peer infrastructure. Any node can use the DHT substrate to
determine the current live node that is responsible for a given key.
When joining the network, a node receives a unique identifier
(typically by hashing its IP address and port number) that determines
its position in the identifier space. Nodes are organized in a ring
according to their identifiers, and every node is responsible for the
keys that fall between itself (inclusive) and its predecessor
(exclusive).
In addition to keeping track of their successors and predecessors on
the ring, each node maintains a ``finger'' table whose entries point
to nodes at an exponentially increasing distance from the current
node's position. More precisely, the
![]() entry of a node with
identifier
entry of a node with
identifier
![]() designates the live node responsible for key
designates the live node responsible for key
![]() . Note that the successor is effectively the first entry in the
finger table.
. Note that the successor is effectively the first entry in the
finger table.
4 function join(n0) -- n0: some node in the ring 5 predecessor = nil 6 finger[1] = call(n0, {'find_successor', n.id}) 7 call(finger[1], {'notify', n}) 8 end 9 function stabilize() -- periodically verify n's successor 10 local x = call(finger[1], 'predecessor') 11 if x and between(x.id, n.id, finger[1].id, false, false) then 12 finger[1] = x -- new successor 13 end 14 call(finger[1], {'notify', n}) 15 end 16 function notify(n0) -- n0 thinks it might be our predecessor 17 if not predecessor or between(n0.id, predecessor.id, n.id, false, false) then 18 predecessor = n0 -- new predecessor 19 end 20 end 21 function fix_fingers() -- refresh fingers 22 refresh = (refresh % m) + 1 -- 1 <= refresh <= m 23 finger[refresh] = find_successor((n.id + 2^(refresh - 1)) % 2^m) 24 end 25 function check_predecessor() -- checks if predecessor has failed 26 if predecessor and not ping(predecessor) then 27 predecessor = nil 28 end 29 end |
Listing 1 shows the code for the construction
and maintenance of the Chord overlay. For clarity, we only show here
the basic algorithm that was proposed in [33] (the reader can
appreciate the similarity between this code and Figure 6 of the
referenced paper).Function
These functions are identical in their behavior and very similar in
their form to those published in [33]. Yet, they correspond
to executable code that can be readily deployed. The implementation of
Chord illustrates a subtle problem that occurs frequently when
developing distributed applications from a high-level pseudo-code
description: the reception of multiple messages may trigger concurrent
operations that perform conflicting modifications on the state of the
node. SPLAY's coroutine model alleviates this problem in some, but
not all, situations. During the blocking call to join() allows a node to join the Chord ring. Only its
successor is set: its predecessor and successor's predecessor will be updated
as part of the stabilization process. Function stabilize() periodically
verifies that a node is its own successor's predecessor and notifies the
successor.
SPLAY base library's between call determines
the inclusion of a value in a range, on a ring.
Function notify()
tells a node that its predecessor might be incorrect. Function
fix_fingers() iteratively refreshes fingers. Finally, function
check_predecessor() periodically checks if a node's predecessor has
failed.
ping() on
line 26 of Listing 1, a remote call to
notify() can update the predecessor, which may be erased on
line 27 until the next remote call to notify().
This is not a major issue as it may only delay stabilization, not
break consistency. It can be avoided by adding an extra check after
the ping or, more generally, by using the locks provided by the
SPLAY standard libraries (not shown here).
30 function find_successor(id) -- ask node to find id's successor 31 if between(id, n.id, finger[1].id, false, true) then -- inclusive for second bound 32 return finger[1] 33 end 34 local n0 = closest_preceding_node(id) 35 return call(n0, {'find_successor', id}) 36 end 37 function closest_preceding_node(id) -- finger preceding id 38 for i = m, 1, -1 do 39 if finger[i] and between(finger[i].id, n.id, id, false, false) then 40 return finger[i] 41 end 42 end 43 return n 44 end |
Listing 2 shows the code for Chord
lookup. Function
This almost completes our minimal Chord implementation, with the
exception of the initialization code shown in
Listing 3. One can specifically note the
registration of periodic stabilization tasks and the invocation of the
main event loop.
find_successor() looks for the successor of a
given identifier, while function closest_preceding_node()
returns the highest predecessor of a given identifier found in the
finger table. Again, one can appreciate the similarity with the
original pseudo-code.
1 require "splay.base" -- events, misc, socket (core libraries) 2 require "splay.rpc" -- rpc (optional library) 3 between, call, ping = misc.between_c, rpc.call, rpc.ping -- aliases 45 timeout = 5 -- stabilization frequency 46 m = 24 -- 2^m nodes and key with identifiers of length m 47 n = job.me -- our node {ip, port, id} 48 n.id = math.random(1, 2^m) -- random position on ring 49 predecessor = nil -- previous node on ring {id, ip, port} 50 finger = {[1] = n} -- finger table with m entries 51 refresh = 0 -- next finger to refresh 52 n0 = job.nodes[1] -- first peer is rendez-vous node 53 rpc.server(n.port) -- start rpc server 54 events.thread(function() join(n0) end) -- join chord ring 55 events.periodic(stabilize, timeout) -- periodically check successor, ... 56 events.periodic(check_predecessor, timeout) -- predecessor, ... 57 events.periodic(fix_fingers, timeout) -- and fingers 58 events.loop() -- execute main loop |
While this code is quite classical in its form, the remarkable features are the conciseness of the implementation, the closeness to pseudo-code, and the ease with which one can communicate with other nodes of the system by RPC. Of course, most of the complexity is hidden inside the SPLAY infrastructure.
The presented implementation is not fault-tolerant. Although the goal
of this paper is not to present the design of a fault-tolerant Chord,
we briefly elaborate below on some steps needed to make Chord robust
enough for running on error-prone platforms such as PlanetLab. The
first step is to take into account the absence of a reply to an RPC.
Consider the call to predecessor in method
stabilize(). One simply needs to replace this call by the code
of Figure 4.
1 function stabilize() -- rpc.a_call() returns both status and results 2 local ok, x = rpc.a_call(finger[1], 'predecessor', 60) -- RPC, 1m timeout 3 if not ok then 4 suspect(finger[1]) -- will prune the node out of local routing tables 5 else 6 (...) |
We omit the code of function suspect() for brevity. Depending on
the reliability of the links, this function prunes the suspected node
after a configurable number of missed replies. One can tune the RPC
timeout according to the target platform (here, 1 minute instead of
the standard 2 minutes), or use an adaptive strategy (e.g.,
exponentially increasing timeouts).
Finally, as suggested by [33] and similarly to the leafset
structure used in Pastry [31], we replace the single
successor and predecessor by a list of 4 peers in each direction on
the ring.Our Chord implementation without fault-tolerance is only 58 lines
long, which represents an increase of 18%
over the pseudo-code from the original paper
(which does not contain initialization code,
while our code does)
.
Our fault-tolerant version is only 100 lines long, i.e., 73% more
than the base implementation (29% for fault tolerance, and 44% for
the leafset-like structure). We detail the procedure for deployment
and the results obtained with both versions on a ModelNet cluster and
on PlanetLab, respectively, in Section 5.2.
This section presents a thorough evaluation of SPLAY performance and capabilities. Evaluating such an infrastructure is a challenging task as the way users will use it plays an important role. Therefore, our goal in this evaluation is twofold: (1) to present the implementation, deployment and observation of real distributed systems by using SPLAY's capability to easily reproduce experiments that are commonly used in evaluations and (2) to study the performance of SPLAY itself, both by comparing it to other widely-used implementations and by evaluating its costs and scalability. The overall objective is to demonstrate the usefulness and benefits of SPLAY rather than evaluate the distributed applications themselves. We first demonstrate in Section 5.1 SPLAY's capabilities to easily express complex system in a concise manner. We present in Section 5.2 the deployment and performance evaluation of the Chord DHT proposed in Section 4, using a ModelNet [35] cluster and PlanetLab [11]. We then compare in Section 5.3 the performance and scalability of the Pastry [31] DHT written with SPLAY against a legacy Java implementation, FreePastry [4]. Sections 5.4 and 5.5 evaluate SPLAY's ability to easily (1) deploy applications in complex network settings (mixed PlanetLab and ModelNet deployment) and (2) reproduce arbitrary churn conditions. Section 5.6 focuses on SPLAY performance for deploying and undeploying applications on a testbed. We conclude in Section 5.7 with an evaluation of SPLAY's performance with resource-intensive applications (tree-based content dissemination and long-term running of a cooperative Web cache).
Experimental setup. Unless specified otherwise, our
experimentations were performed either on PlanetLab, using a set of 400 to 450
hosts, or on our local cluster (11 nodes, each equipped with a 2.13 Ghz Core 2
Duo processor and 2 GB of memory, linked by a 1 Gbps switched network). All
nodes run GNU/Linux 2.6.9. A separate node running FreeBSD 4.11 is used as a
ModelNet router, when required by the experiment. Our ModelNet configuration
emulates 1,100 hosts connected to a 500-node transit-stub topology. The
bandwidth is set to 10Mbps for all links. RTT between nodes of the same domain
is 10 ms, stub-stub and stub-transit RTT is 30 ms, and transit-transit (i.e.,
long range links) RTT is 100 ms. These settings result in delays that are
approximately twice those experienced in PlanetLab.
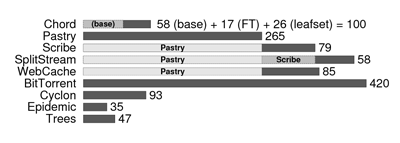
We developed the following applications using SPLAY:
Chord [33] and Pastry [31], two DHTs;
Scribe [15], a publish-subscribe system;
SplitStream [14], a bandwidth-intensive multicast
protocol;
a cooperative web-cache based on Pastry;
BitTorrent [17], a content distribution
infrastructure;1and Cyclon [36], a gossip-based
membership management protocol.
We have also implemented a number of classical algorithms, such as
epidemic diffusion on Erdös-Renyi random graphs [19] and
various types of distribution trees [13] (
![]() -ary trees,
parallel trees). As one can note from the following figure, all
implementations are extremely concise in terms of lines of code
(LOC).
Note that we did not try to compact the code in a
way that would impair readability.
Numbers and darker bars represent LOC for the protocol, while
lighter bars represent protocols acting as a substrate (Scribe and our
Web cache are based on Pastry, SplitStream is based on both Pastry and
Scribe):
-ary trees,
parallel trees). As one can note from the following figure, all
implementations are extremely concise in terms of lines of code
(LOC).
Note that we did not try to compact the code in a
way that would impair readability.
Numbers and darker bars represent LOC for the protocol, while
lighter bars represent protocols acting as a substrate (Scribe and our
Web cache are based on Pastry, SplitStream is based on both Pastry and
Scribe):
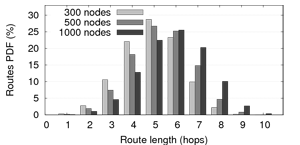
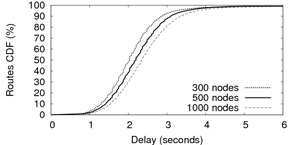
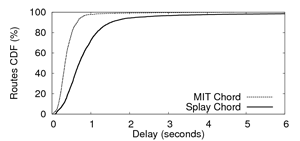
(a) left: ModelNet, route lengths - (b) middle: Modelnet, delays - (c) right: PlanetLab: delays |
This section presents the deployment and performance results of the
Chord implementation from Section 4. We proceed with
two deployments. First, the exact code presented in this paper is
deployed in a ModelNet testbed with no node failure. Second, a slightly
modified version of this code is run on PlanetLab. This version includes
the extensions presented at the end of Section 4:
use of a leaf set instead of a single successor and a single
predecessor, fault-tolerant RPCs, and shorter stabilization intervals.
To parameterize the deployment of the Chord implementation presented in Section 4 on a testbed, we create a descriptor that describes resources requirements and limitations. The descriptor allows to further restrict memory, disk and network usage, and it specifies what information an application should receive when instantiated:
--[[ BEGIN SPLAY RESOURCES RESERVATION
nb_splayd 1000
nodes head 1
END SPLAY RESOURCES RESERVATION ]]
|
This descriptor requests 1,000 instances of the application and specifies that each instance will receive three essential pieces of information: (1) a single-element list containing the first node in the deployment sequence (to act as rendezvous node); (2) the rank of the current process in the deployment sequence; and (3) the identity of the current process (host and port). This information is useful to bootstrap the system without having to rely on external mechanisms such as a directory service. In the case of Chord, we use this information to have hosts join the network one after the other, with a delay between consecutive joins to ensure that a single ring is created. A staggered join strategy allows better experiments reproducibility, but a massive join scenario would succeed as well. The following code is added:
events.sleep(job.position) -- 1s between joins if #job.position > 1 then -- first node is rendez-vous node join(job.nodes[1]) end |
Finally, we register the Lua script and the deployment descriptor using
one of the command line, Web service or Web-based interfaces.
Each host runs 27 to 91 Chord nodes (we show in
Section 5.3 that SPLAY can handle many
more instances on a single host). During the experiment, each node
injects 50 random lookup requests in the system. We then undeploy the
overlay, and process the results obtained from the logging facility.
Figure 6(a) presents the distribution of
route lengths. Figure 6(b) presents the
cumulative distribution of latencies.
The average number of hops is below
![]() and the
look-up time remains small. This supports our observations that
SPLAY is efficient and does not introduce additional delays or
overheads.
and the
look-up time remains small. This supports our observations that
SPLAY is efficient and does not introduce additional delays or
overheads.
Next, we deploy our Chord implementation with extensions on 380 PlanetLab
nodes and compare its performance with MIT's fine-tuned C++ Chord
implementation [5] in terms of delays when looking up random keys
in the DHT. In both cases, we let the Chord overlay stabilizes before starting
the measurements. Figure 6(c) presents the cumulative
distribution of delays for 5000 random lookups (average route length is 4.1
for both systems). We observe that MIT Chord outperforms Chord for SPLAY,
because it relies on a custom network layer that uses, amongst other
optimizations, network coordinates for constructing latency-aware finger
tables. In contrast, we did not include such optimizations in our
implementation.
(a) left: Delay distribution comparison, 980 nodes |
We evaluate the performance of applications using SPLAY in two
ways. First, we evaluate the efficiency of the network libraries,
based on the delays experienced by a sample application on a
high-performance testbed. Second, we evaluate scalability: how many
nodes can be run on a single host and what is the impact on
performance. For these tests we chose Pastry [31]
because: (i) it combines both TCP and UDP communications; (ii) it
requires efficient network libraries and transport layers, each node
being potentially opening sockets and sending data to a large number
of other peers; (iii) it supports network proximity-based peer
selection, and as such can be affected by fluctuating or unstable
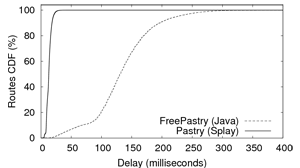
delays (for instance due to overload or scheduling issues).We compare our version of Pastry with FreePastry 2.0 [4], a
complete implementation of the Pastry protocol in Java.
Our
implementation is functionally identical to FreePastry and uses the very same
protocols, e.g., locality-aware routing table construction and stabilization
mechanisms to repair broken routing table entries. The only notable
differences reside in the message formats (no wire compatibility) and the
choice of alternate routes upon failure.
We deployed FreePastry using all optimizations advised by the
authors, that is, running multiple nodes within the same JVM,
replacing Java serialization with raw serialization, and keeping a
pool of opened TCP connections to peers to avoid reopening recently
used connections. We used 3 JVMs on our dual cores machines,each running multiple Pastry nodes.With a large
set of nodes, our experiments have shown that this configuration
yields slightly better results than using a single JVM, both in
terms of delay and load.
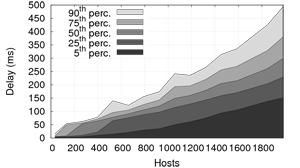
Figure 7(a) presents the cumulative delay
distribution in a converged Pastry ring. The distribution of route
lengths (not shown) is slightly better with FreePastry thanks to
optimizations in the routing table management. Delays obtained with
Pastry on SPLAY are much lower than the delays obtained with
FreePastry. This experiment shows that SPLAY, while allowing for
concise and readable protocol implementations, does not trade
simplicity for efficiency. We also notice that Java-based programs are
often too heavyweight to be used with multiple instances on a single
host.2This is further conveyed by our second experiment that compares
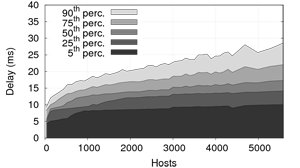
the evolution of delays of FreePastry
(Figure 7(b)) and Pastry for SPLAY
(Figure 7(c)) as the number of nodes on the
testbed increases. We use a percentile-based plotting method that
allows expressing the evolution of a cumulative distribution of delays
with respect to the number of nodes.
We can observe that: (1) delays start increasing exponentially for
FreePastry when there are more than 1,600 nodes running in the
cluster, that is 145 nodes per host (recall that all nodes on a single
host are hosted by only 3 JVMs and share most of their memory
footprint); (2) it is not possible to run more than 1,980 FreePastry
nodes, as the system will start swapping, degrading performance
dramatically; (3) SPLAY can handle 5,500 nodes (500 on each host)
without significant drop in performance (other than the
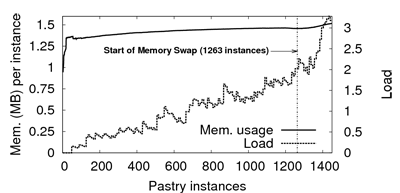
Figure 8 presents the load (i.e., average number of
processes with ``runnable'' status, as reported by the Linux
scheduler) and memory consumption per instance for varying number of
instances. Each process is a Pastry node and issues a random request
every minute. We observe that the memory footprint of an instance is
lower than 1.5 MB, with just a slight increase during the experiment
as nodes fill their routing table. It takes 1,263 Pastry instances
before the host system starts swapping memory to disk. Load (averaged
over the last minute) remains reasonably low, which explains the small
delays presented by Figure 7(c).
![]() route lengths evolution,
route lengths evolution,
![]() being the number of
nodes).
being the number of
nodes).
SPLAY is designed to be used within a large set of different
testbeds. Despite this diversity, it is sometimes also desirable to
experiment with more than a single testbed at a time. For instance, one
may want to evaluate a complex system with a set of peers linked by high
bandwidth, non-lossy links, emulated by ModelNet, and a set of peers
facing adverse network conditions on PlanetLab. A typical usage would
be to test a broker-based publish-subscribe infrastructure deployed on
reliable nodes, along with a set of client nodes facing churn and lossy
network links.
Such a mixed deployment requires a deep understanding of the
system for setting it up using scripting and common
tools, as the user has to care about NAT and firewalls traversal, port
forwarding, etc.
The experiment presented in this section shows that such a complex mixed
deployment can be achieved using SPLAY as if it were on a single
testbed. The only precondition is that the administrator of
the part of the
testbed
that is
behind a NAT or firewall defines (and opens) a range of ports that all
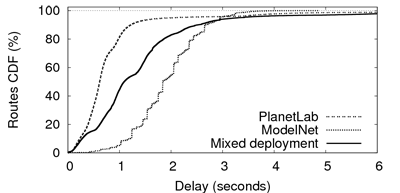
Figure 9 presents the delay distribution
for a deployment of 1,000 nodes on PlanetLab, on ModelNet, and in a
mixed deployment over both testbeds at the same time (i.e., 500 nodes
on each). We notice that the delays of the mixed deployment are
distributed between the delays of PlanetLab and the higher delays of
our ModelNet cluster. The ``steps'' on the ModelNet cumulative delays
representation are a result of routes of increasing number of hops
(both in Pastry and in the emulated topology), and the fixed delays
for ModelNet links.
splayds will use to communicate with other daemons outside the
testbed.
Notably for a ModelNet cluster, this operation can easily be done
at the time Modelnet is installed on the nodes of the testbed and it does not
requires additional access rights.
All other communication details are dealt with by SPLAY
itself: no modification is needed to the application code.
This section evaluates the use of the churn management module, both using traces and synthetic descriptions. Using churn is as simple as launching a regular SPLAY application with a trace file as extra argument. SPLAY provides a set of tools to generate and process trace files. One can, for instance, speed-up a trace, increase the churn amplitude whilst keeping its statistical properties, or generate a trace from a synthetic description.
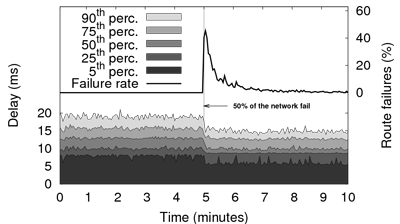 |
Figure 10 presents a typical experiment of a massive failure using the synthetic description. We ran Pastry on our local cluster with 1,500 nodes and, after 5 minutes, triggered a sudden failure of half of the network (750 nodes). This models, for example, the disconnection of a inter-continental link or a WAN link between two corporate LANs. We observe that the number of failed lookups reaches almost 50% after the massive failure due to routing table entries referring to unreachable nodes. Pastry recovers all its routing capabilities in about 5 minutes and we can observe that delays actually decrease after the failure because the population has shrunk (delays are shown for successful routes only). While this scenario is amongst the simplest ones, churn descriptions allow users to experiment with much more complex scenarios, as discussed in Section 3.2.
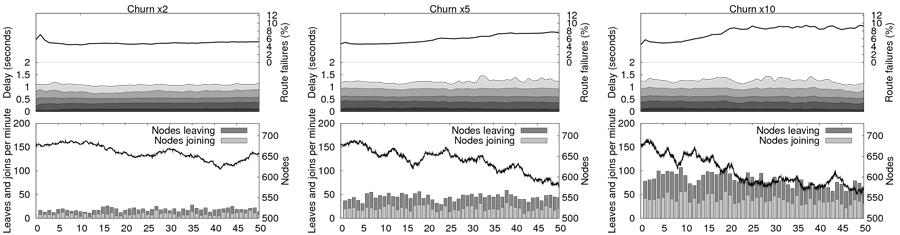 |
Our second experiment is representative of a complex test scenario that
would usually involve much engineering, testing and
post-processing.
We use the churn trace observed in the Overnet file sharing
peer-to-peer system [12]. We want to
observe the behavior of Pastry, deployed on PlanetLab, when facing
churn rates that are much beyond the natural churn rates suffered in
PlanetLab. As we want increasing levels of Churn, we simply
``speed-up'' the trace, that is, with a speed-up factor of 2x, 5x or 10,
a minute in the original trace is mapped to 30, 12 or 6 seconds
respectively. Figure 11 presents both the churn
description and the evolution of delays and failure rates, for
increasing levels of churn. The churn description shows the population
of nodes and the number of joins/leaves as a function of time, and
performance observations plot the evolution of the delay distribution
as a function of time. We observe that (1) Pastry handles churn pretty
well as we do not observe a significant failure rate when as much as
14% of the nodes are changing state within a single minute;
(2) running this experiment is neither more complex nor longer than on
a single cluster without churn, as we did for
Figure 7(a).
Based on our own experience, we estimate that it takes at least one
order of magnitude less human efforts to conduct this experiment using
SPLAY than with any other deployment tools.
We strongly believe that the availability of tools such as SPLAY will
encourage the community to further test and deploy their protocols under
adverse conditions, and to compare systems using published churn models.
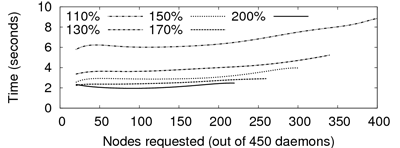 |
This section presents an evaluation of the deployment time of an
application on an adversarial testbed, PlanetLab. This further conveys
our position from Section 3.1 that one
needs to initially select a larger set of nodes than requested to
ensure that one can rely on reasonably responsive nodes for deploying
the application. Traditionally, such a selection process is done by
hand, or using simple heuristics based on the load or response time of
the nodes. SPLAY relieves the need for the user to proceed with
this selection. Figure 12 presents the
deployment time for the Pastry application on PlanetLab. We vary the
number of additionally probed daemons from 10% to 100% of the
requested nodes. We observe that a larger set results in lower delays
for deploying an application (hence, presumably, lower delays for
subsequent application communications). Nonetheless, the selection of
a reasonably large superset for a proper selection of peers is a
tradeoff between deployment delay and redundant messages sent over the
network. Based on experiments, we use by default an initial superset
of 125% of requested nodes.
Our two last experimental demonstrations deal with resource-intensive
applications, both for short-term and long-term runs. They further
conveys SPLAY's ability to run in high performance settings and
production environments, as well as demonstrating that the obtained
performance is similar to the one achieved with a dedicated
implementation (particularly from the network point of view).
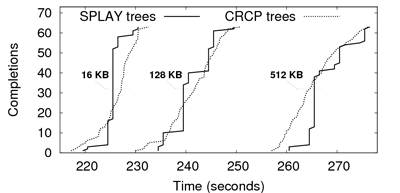
We run the following two experiments: (1) the evaluation of a
cooperative data distribution algorithm based on parallel trees using
both SPLAY and a native (C) implementation on ModelNet and (2) a
distributed cooperative Web cache for HTTP accesses, which has been
running for several weeks under a constant and significant load.
Tests were run in a ModelNet testbed configured with a symmetric bandwidth of 1 Mbps for each node. Results are shown in Figure 13 for binary trees, a 24 MB file, and different block sizes (16 KB, 128 KB, 512 KB). We observe that both implementations produce similar results, which tends to demonstrate that the overhead of SPLAY's language and libraries is negligible. Differences in shape are due to CRCP nodes sending chunks sequentially to their children, while SPLAY nodes send chunks in parallel. In our settings (i.e., homogeneous bandwidth), this should not change the completion time of the last peer as links are saturated at all times.
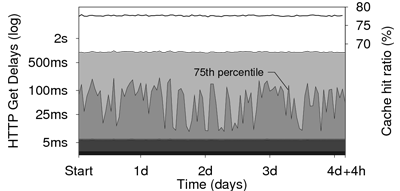
Our last experiment presents the performance over time of a cooperative Web cache built using SPLAY following the same base design as Squirrel [21]. This experiment highlights the ability of SPLAY to support long-run applications under constant load. The cache uses our Pastry DHT implementation deployed in a cluster, with 100 nodes that proxy requests and store remote Web resources for speeding up subsequent accesses. For this experiment, we limit the number of entries stored by each nodes to 100. Cached resources are evicted according to an LRU policy or when they are older than 120 seconds. The cooperative Web cache has been run for three weeks. Figure 14 presents the evolution of HTTP requests delay distribution for a period of 100 hours along with the cache hit ratio. We injected a continuous stream of 100 requests per second extracted from real Web access traces [7] corresponding to 1.7 million hits to 42,000 different URLs. We observe a steady cache hit ratio of 77.6%. The experienced delays distribution has remained stable throughout the whole run of the application. Most accesses (75th percentile) are cached and served in less than 25 to 100 ms, compared to non-cached accesses that require 1 to 2 seconds on average.
SPLAY is an infrastructure that aims at simplifying the development, deployment and evaluation of large-scale distributed applications. It incorporates several novel features not found in existing tools and testbeds. SPLAY applications are specified using in a high-level, efficient scripting language very close to pseudo-code commonly used by researchers in their publications. They execute in a sandboxed environment and can thus be readily deployed on non-dedicated hosts. SPLAY also includes a comprehensive set of shared libraries tailored for the development of distributed protocols. Application specifications are based on an event-driven model and are extremely concise.
SPLAY can seamlessly deploy applications in real (e.g., PlanetLab) or emulated (e.g., ModelNet) networks, as well as mixed environments. An original feature of SPLAY is its ability to inject churn in the system using a trace or a synthetic description to test applications in the most realistic conditions. Our thorough evaluation of SPLAY demonstrates that it allows developers to easily express complex systems in a concise yet readable manner, scales remarkably well thanks to its low footprint, exhibits very good performance in various deployment scenarios, and compares favorably against native applications in our experiments. SPLAY is publicly available from https://www.splay-project.org.
We would like to thank the anynymous reviewers for their constructive comments, as well as Petros Maniatis whose help was invaluable for preparing the final version of this paper.
This work was carried out during the tenure of Etienne Rivière's ERCIM "Alain Bensoussan" fellowship programme.
This work is supported in part by the Swiss National Foundation under agreement number 102819.
Disclaimer: some URLs are given in the bibliography of this document for convenience reasons only. The authors, NSDI organizers and the USENIX association shall not be held responsible if the linked content is not available anymore, if the link points to a different content than expected, or if the content linked does not reflect exactly the content initially listed on this page.
The initial version of this document was produced using the LaTeX2HTML translator Version 2002-2-1 (1.71).
![\includegraphics[width=0.85\textwidth]{figs/churn2}](figs/figure4b.png)
![\includegraphics[width=0.9\linewidth]{figs/layers-bw}](figs/figure5.png)