Our objective is to leverage popular existing peer-to-peer overlays to send confidential and anonymous messages without public keys. We focus on practical low-delay anonymity for everyday applications, rather than perfect anonymity at all costs. Popular peer-to-peer overlays have thousands of nodes and much traffic [5], creating an ideal environment for hiding anonymous communications. The dynamic nature of their participants makes them hard to track, and their diverse constituency allows dividing trust among nodes that are unlikely to collude. Some prior work has envisioned using these overlays for anonymity [15,24,21,23,16,27]. Current proposals, however, fall into two camps: either they do not address the high node churn in these environments and need all overlay nodes to have public keys [15,24,21,16], or they address churn but need very expensive solutions such as group key management [31] or broadcast [27].
This paper presents information slicing, a single technique that provides source and destination anonymity and churn resilience, without using any public key cryptography. It can also provide message confidentiality as long as the attacker cannot snoop on all traffic going to the destination. These characteristics make it suitable for use over popular peer-to-peer overlays. For example, say Alice knows that Bob, like many of us, uses a popular file sharing overlay to download content, and the overlay software supports information slicing. Then Alice can send Bob a confidential anonymous message without any public keys and in a manner robust to node churn and failures.
To provide confidentiality, our technique employs a properly chosen coding scheme to randomize the message. It then divides the randomized message into pieces, and sends the pieces along node disjoint paths that meet only at the destination. As a result, an attacker that gets all but one of the pieces of the randomized message cannot decode and recover the original message. Only the destination receives all pieces and can decode the message.
Information slicing also provides anonymity without requiring the overlay nodes to have public keys. Typically, anonymizers use onion routing, which assumes the sender has the public keys of all the nodes in the overlay. Onion routing hides the correspondence between a source and destination by sending the route setup message through a chain of nodes, wrapped in layers of public key encryption, such that each node along the path knows only its previous and next hops. Instead, to create an anonymous path, we send to each intermediate node its routing information (i.e., its next hop) in a confidential message sliced over multiple disjoint paths. The technical challenge is to perform this process efficiently. To send a relay node the identity of its next hop along different paths, we need to tell each node along these paths about its own next hop anonymously. Performed naively, this needs an exponential number of disjoint paths, and thus an exponential number of nodes. To avoid exponential blow-up, we build efficient forwarding graphs that reuse the overlay nodes without leaking information.
Finally, information slicing naturally provides protection against node churn and failures. The standard approach to address node failures is to employ multiple paths and add redundancy to the data. The challenge however is to minimize the redundancy overhead for the same amount of resilience. Typically, communication channels use coding to address such a challenge. We show that the same codes that we use to send confidential messages can simultaneously provide resilience to churn and failures. We also boost robustness by using network coding, which is proven to minimize redundancy while maximizing resilience to failures [18].
We show analytically and demonstrate experimentally that information slicing provides high anonymity and is resilient to node churn. We implement our protocol and evaluate its real-world performance in PlanetLab. Our experimental results show that information slicing provides higher throughput than onion routing. Further, it provides strong resilience to node churn, while using minimal redundancy.
Most modern anonymizers are based on Chaum's mixes [9] and its near realtime variant, onion routing [17]. The sender constructs a route by picking intermediate hops from a list of mixing nodes. The mixers may delay and re-order the packets depending on the traffic's timing constraints. The sender encrypts the IP address of each node along the path with the public key of its previous hop. This creates layers of encryption, like layers of an onion. Each node decrypts the packets, discovers its next hop and forwards the packet to the next hop and so on until the entire path is set up. Once the path is established, nodes exchange computationally efficient symmetric secret keys to transmit the actual data itself.
A few anonymizers rely on static and dedicated overlays [12,4,3,2]. For example, Tor [12] is a widely used anonymous system based on onion routing. Tor's infrastructure contains a small set of distributed nodes. Admission to the Tor network is tightly controlled. Tor has a centralized trusted directory server that provides the users with IP addresses and public keys of all the nodes in the system.
Some proposals [31,15,24,16] aim to build anonymity out of global peer-to-peer overlays. Most of these systems employ onion routing and use public key cryptography. Only one of them addresses churn explicitly [31]. For example, Tarzan [15] uses onion routing, assumes each overlay node has a public key, and distributes these keys to interested senders using a gossip protocol. Tarzan sets up tunnels along each path, which are rebuilt upon node failures or departures. MorphMix's design is fairly similar to Tarzan and differs only in the details of the tunnel setup procedure [24]. Herbivore [16] builds on DC-nets [9] to provide anonymity in large overlays. It divides nodes into cliques and requires shared secrets across cliques via either a PKI or offline key exchanges. Freenet [10] is a decentralized censorship-resistant peer-to-peer data storage facility, intended for anonymous publishing, not communication.
Similar to ours, some prior work does not use public key cryptography.
In Crowds [23], each intermediate node flips a coin to
decide whether to forward a packet to the destination or to a
random node in the overlay. In contrast to our work, Crowds does not
provide destination anonymity, and uses a centralized
admission server to admit nodes into the overlay. AP3 [21]
is based on the same random routing idea, and similarly does not
provide destination anonymity. ![]() [27] achieves
anonymity by broadcasting encrypted packets at a constant rate to all
participants. When a node has no packets to send, it broadcasts noise,
which is then propagated through the network in the same manner as
data packets. In comparison, our system does not broadcast messages
and thus has a lower overhead. Finally, Malkhi et al. propose a
system based on Secure Multi-Party Communication, which does not
require cryptography [20]. They do, however, require secure
channels between all participants. Such a requirement is hard to
achieve in a large global overlay where most of the participants do
not know each other a priori, and one cannot distinguish between good
and bad participants.
[27] achieves
anonymity by broadcasting encrypted packets at a constant rate to all
participants. When a node has no packets to send, it broadcasts noise,
which is then propagated through the network in the same manner as
data packets. In comparison, our system does not broadcast messages
and thus has a lower overhead. Finally, Malkhi et al. propose a
system based on Secure Multi-Party Communication, which does not
require cryptography [20]. They do, however, require secure
channels between all participants. Such a requirement is hard to
achieve in a large global overlay where most of the participants do
not know each other a priori, and one cannot distinguish between good
and bad participants.
To the best of our knowledge, there is only one prior proposal for addressing churn in anonymizing overlays. Cashmere [31] tackles churn by using a multicast group at each hop instead of a single node. Any node in the multicast group can forward the message. Cashmere assumes a trusted public key infrastructure (PKI) that assigns the same key to all nodes in each multicast group. Hence, Cashmere needs group key management and key redistribution, whenever group membership changes, which happens often in dynamic peer-to-peer overlays.
Finally, our information slicing idea is related to the theoretical work on secure communication [13,29]. This work bounds the adversarial strength under which perfectly secure communication is possible. Our work on the other hand considers the problem of anonymous, confidential, and resilient communication. We provide stronger resilience to churn, a system implementation and evaluation of the performance of our protocol.
Some of the coding techniques used in our work are related to secret sharing [26]. A secret-sharing scheme is a method for distributing a secret among a group of participants, each of which is allotted a share of the secret. The secret can only be reconstructed when the shares are combined together, individual shares are of no use on their own. Our work, however, is significantly different from prior work on secret sharing; we focus on building a practical anonymizing overlay. Furthermore, our ideas about node reuse, the graph construction algorithm, and churn resilience are all different from secret sharing.
(a) Goals: This paper aims to hide the source and destination identities, as well as the message content, from both external adversaries and the relay nodes. Further, the destination also does not know the identity of the actual source. Said differently, we are interested in the same type of anonymity exhibited in onion routing, where a relay node cannot identify the source or the destination, or decipher the content of the message; all it knows are its previous and next hops.
We also want a system that is practical and simple to deploy in a dynamic and unmanaged peer-to-peer overlay. The design should deal effectively with node churn. It must not need a trusted third party or a public key infrastructure, and preferably should not use any public key cryptography. The system also should not impose a heavy load on individual overlay nodes or require them to provide much bandwidth.
(b) Threat model: We assume an adversary who can observe a fraction of network traffic, operate relay nodes of his own, and compromise some fraction of the relays. Further, the compromised relays may also collude among themselves. Like prior proposals for low-latency anonymous routing, we do not address a global attacker who can snoop on all links in the network [12,21,15,31]. Such a global attacker is unlikely in practice. We also assume that the attacker cannot snoop on all paths leading to the destination. If this latter assumption is unsatisfied, i.e., the attacker can snoop on all of the destination's traffic, the attacker can decode the content of the message but cannot identify the source of the message.
(c) Assumptions: We assume the source has
an uncompromised IP address to access the Internet, ![]() . Additionally,
we assume the source has access to one or more IP addresses from which
she can send. These IPs, which we call pseudo-sources
. Additionally,
we assume the source has access to one or more IP addresses from which
she can send. These IPs, which we call pseudo-sources ![]() , should
not be on the same local network as
, should
not be on the same local network as ![]() . We assume that the source
has a shared key with each of the pseudo-sources and communicates with
them over a secure channel.
. We assume that the source
has a shared key with each of the pseudo-sources and communicates with
them over a secure channel.
We believe these assumptions are reasonable. Many people have Internet access at home and at work or school, and thus can use one of these addresses as the source and the rest as pseudo-sources. Even when the user has only one IP address, she is likely to have a spouse, a friend, or a parent whose IP address she can use. When none of that is available, the user can go to an Internet cafe and use her home address as the source and the cafe's IP as a pseudo-source.
Note that the pseudo-sources cannot identify the destination or decipher the content of the message. They can only tell that the source is sending an anonymous message. In our system, we assume that the source wants to keep the pseudo-sources anonymous because they are personally linked to her, i.e., we protect the anonymity of the pseudo-sources in the same way as we protect the anonymity of the source. We conservatively assume that if the anonymity of any one of them is compromised then the source anonymity is also compromised. Thus, in the rest of this paper, the anonymity of the source comprises the anonymity of all pseudo-sources.
We address each of these questions in the following sections, starting with message confidentiality.
 |
Sending a message slice in the clear is undesirable, as the slice may
expose partial information to intermediate nodes along the path. For
example, a node that sees ![]() ``Let's meet'' knows that Alice
and Bob are arranging for a meeting. Thus, Alice multiplies the
message vector
``Let's meet'' knows that Alice
and Bob are arranging for a meeting. Thus, Alice multiplies the
message vector
![]() with a random but
invertible
with a random but
invertible ![]() matrix
matrix ![]() and generates
and generates ![]() slices which
constitute a random version of the message:
slices which
constitute a random version of the message:
 |
Our approach to anonymity without keys relies on a simple idea: anonymity can be built out of confidentiality. For anonymous communication, the source needs to send to every relay node along the path its routing information (i.e., its next hop) in a confidential message, accessible only to the intended relay. Information slicing enables a source to send such confidential messages without keys.
Using information slicing for anonymity, however, is challenging. To send a particular node the identity of its next hop along different anonymous paths, one needs to anonymously tell each node along these paths about its own next hop. This requires an exponential number of disjoint paths, and thus an exponential number of nodes. To avoid exponential blow-up, it is essential that the source constructs efficient forwarding graphs that reuse the overlay nodes without giving them too much information. The construction of such graphs in the general case is discussed in §4.2.1, but we first explain a simple example to give the reader an intuition about how the protocol works.
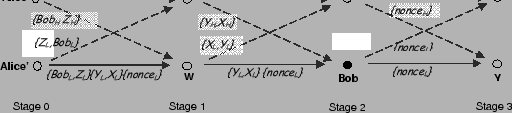
Alice has Internet at home and work, and hence has access to two IP
addresses: ![]() and
and ![]() . Alice arranges the overlay nodes
into stages. Let's say she uses the graph in
Fig. 2, which contains 3 stages (path length
. Alice arranges the overlay nodes
into stages. Let's say she uses the graph in
Fig. 2, which contains 3 stages (path length
![]() ), each containing 2 nodes (split factor
), each containing 2 nodes (split factor ![]() ) (we will show how
to pick appropriate values for
) (we will show how
to pick appropriate values for ![]() and
and ![]() in §6). The
in §6). The
![]() stage is the source stage itself. Each node in this graph is
connected to every node in its successive stage. Note that the
destination node, i.e. Bob's node, is randomly assigned to one of the
stages in the graph.
stage is the source stage itself. Each node in this graph is
connected to every node in its successive stage. Note that the
destination node, i.e. Bob's node, is randomly assigned to one of the
stages in the graph.
Alice needs to send to each relay node the IP addresses of its next
hops, without revealing this information to other nodes. To do so, she
splits each IP into two pieces and sends this information over two
paths. Alice could have split each IP address to its most significant
and least significant words. This, however, is undesirable as the most
significant word may indicate the owner of the IP prefix. Instead
Alice first transforms the IP addresses of the relay nodes by
multiplying each address by an invertible matrix ![]() of size
of size ![]() (i.e.,
(i.e., ![]() ). (For simplicity, assume that
). (For simplicity, assume that ![]() is
known to all nodes; in §4.3, we explain how the sender
anonymously sends
is
known to all nodes; in §4.3, we explain how the sender
anonymously sends ![]() to the relays on the graph.) Let
to the relays on the graph.) Let ![]() and
and
![]() be the low and high words of the IP address of node
be the low and high words of the IP address of node ![]() ; Alice
splits the IP address as follows:
; Alice
splits the IP address as follows:
Fig. 2 shows how messages are forwarded so that
each node knows no more than its direct parents and children.
Consider an intermediate node in the graph, say ![]() . It receives the
message ``
. It receives the
message ``
![]() '' from its first
parent. It receives ``
'' from its first
parent. It receives ``![]() '' from its second
parent. After receiving both messages,
'' from its second
parent. After receiving both messages, ![]() can discover its
children's IP addresses as follows:
can discover its
children's IP addresses as follows:
 |
(2) |
You might be wondering how the graph in Fig. 2
will be used to anonymously send data to Bob. Indeed, as it is, Bob
does not even know he is the intended destination; but this is easy to
fix. In addition to sending each node its next-hop IPs, Alice sends
him: (1) a symmetric secret key, (2) and a flag indicating whether he
is the destination. Similar to the next-hop IPs, the key and the flag
of each node are split along disjoint paths, and thus inaccessible to
other nodes. To send a confidential data message, Alice encrypts the
data with the key she sent to Bob during the route setup phase, chops
the data into ![]() pieces, and forwards the pieces along the forwarding
graph to Bob. Once Bob receives the
pieces, and forwards the pieces along the forwarding
graph to Bob. Once Bob receives the ![]() slices of the data, he can
decode the encrypted data and invert the encryption using the key
previously sent to him. No other node can decipher the data even if it
gets all
slices of the data, he can
decode the encrypted data and invert the encryption using the key
previously sent to him. No other node can decipher the data even if it
gets all ![]() slices.
slices.
 |
![[*]](footnote.png)
![\begin{algorithm}
% latex2html id marker 673
[ht!]
{\footnotesize
\caption{I...
...n $e$
\ENDFOR
\ENDFOR
\vskip -0.15in
\end{algorithmic}
}
\end{algorithm}](img69.png)
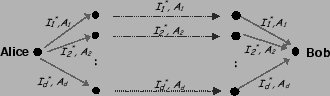
We demonstrate the algorithm by constructing such a graph in
Fig. 4, where ![]() and
and ![]() .
The source starts with the
.
The source starts with the ![]() nodes in
the last stage,
nodes in
the last stage, ![]() and
and ![]() . It assigns both the slices,
. It assigns both the slices,
![]() ,
, ![]() to
to ![]() .
The source then has to decide from whom node
.
The source then has to decide from whom node ![]() will receive its slices.
The source goes through the preceding stages, one by one,
and distributes
will receive its slices.
The source goes through the preceding stages, one by one,
and distributes
![]() among the
among the ![]() nodes at each stage.
The distribution can be random as long as each node receives only one of the slices.
The path taken by slice
nodes at each stage.
The distribution can be random as long as each node receives only one of the slices.
The path taken by slice ![]() to
reach
to
reach ![]() can be constructed by tracing it through the graph.
For e.g., the slice
can be constructed by tracing it through the graph.
For e.g., the slice ![]() traverses
traverses
![]() , which is disjoint from the path taken by
, which is disjoint from the path taken by ![]() , i.e.,
, i.e., ![]() .
The source repeats the process for
the slices of
.
The source repeats the process for
the slices of ![]() , and for the slices of every node in all the other stages.
, and for the slices of every node in all the other stages.
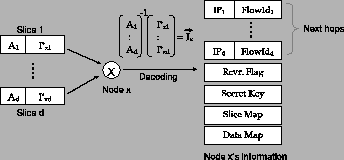 |
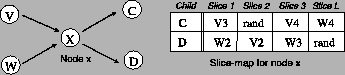
Fig. 6 shows an example slice-map. The slice-map is
a ![]() matrix that tells the relay how to construct the
packets it sends to its children. For example, in
Fig. 6, node
matrix that tells the relay how to construct the
packets it sends to its children. For example, in
Fig. 6, node ![]() has received 2 packets from its
parents. The number of slices in each packet is fixed to the path
length
has received 2 packets from its
parents. The number of slices in each packet is fixed to the path
length ![]() . Note that
. Note that ![]() should first extract its own slice from
each of the packets, which is the first slice in the packet, as
explained in §4.3.5. The other three slices in each packet
are to be forwarded downstream, as prescribed by
should first extract its own slice from
each of the packets, which is the first slice in the packet, as
explained in §4.3.5. The other three slices in each packet
are to be forwarded downstream, as prescribed by ![]() 's slice-map. For
example, the figure shows that the third slice in the packet received
from
's slice-map. For
example, the figure shows that the third slice in the packet received
from ![]() should be the first slice in the packet sent to node
should be the first slice in the packet sent to node ![]() .
Entries labeled ``rand'' refer to padding slices with random bits that
are inserted by the relay node to replace its own slices and maintain
a constant packet size.
.
Entries labeled ``rand'' refer to padding slices with random bits that
are inserted by the relay node to replace its own slices and maintain
a constant packet size.
Additionally, all packets headed to a child node should contain the
child node's slice as the first slice. The source constructs the slice
maps of the parent nodes such that the packets meant for the child
node always have the child node's slice as the first slice in the
packet. Also the child node needs to be able to identify which ![]() packets go together. The source arranges for all of the parent relays
to use the same flow-id for packets going to the same child. The
parent learns these flow-ids as part of its information, as shown in
Fig. 5.
packets go together. The source arranges for all of the parent relays
to use the same flow-id for packets going to the same child. The
parent learns these flow-ids as part of its information, as shown in
Fig. 5.
The source encrypts each data message with the key it sent to the
destination node. Then it chops the data message into ![]() pieces,
converts them into
pieces,
converts them into ![]() slices and multicasts the slices to the nodes
in the first stage of the forwarding graph. Each relay node in the
first stage receives all
slices and multicasts the slices to the nodes
in the first stage of the forwarding graph. Each relay node in the
first stage receives all ![]() data slices, but they cannot multicast
whatever they receive to the nodes in the next stage, since each child
then will receive
data slices, but they cannot multicast
whatever they receive to the nodes in the next stage, since each child
then will receive ![]() data slices leading to bandwidth overhead. On
the other hand, if each node forwards a random slice to each of its
children, then each child will get
data slices leading to bandwidth overhead. On
the other hand, if each node forwards a random slice to each of its
children, then each child will get ![]() data slices; but these slices
may overlap and thus be useless. To solve the problem, the source
sends each relay a data-map as part of its information. The data-map
tells the node how to forward the data slices between each
parent-child pair. The data map is very similar to the slice map shown
in Fig. 6, except that instead of slice numbers the
entries correspond to data packets. The source picks the entries in
the data-map to ensure that each child gets all useful data slices,
and no more. Each node in the graph including the destination therefore
gets
data slices; but these slices
may overlap and thus be useless. To solve the problem, the source
sends each relay a data-map as part of its information. The data-map
tells the node how to forward the data slices between each
parent-child pair. The data map is very similar to the slice map shown
in Fig. 6, except that instead of slice numbers the
entries correspond to data packets. The source picks the entries in
the data-map to ensure that each child gets all useful data slices,
and no more. Each node in the graph including the destination therefore
gets ![]() slices, but since the data slices are encrypted using the
destination's keys, only the destination can recover the original data.
slices, but since the data slices are encrypted using the
destination's keys, only the destination can recover the original data.
(a) Basic idea:
Take a vector of ![]() elements
elements
![]() and
multiply it by a random matrix
and
multiply it by a random matrix ![]() of rank
of rank ![]() and size
and size ![]() where
where ![]() . The result will be a a vector of
. The result will be a a vector of ![]() elements,
elements,
![]() ; it is a redundant version of your
original vector. What is interesting about this process is that it is
possible to retrieve the original message from any
; it is a redundant version of your
original vector. What is interesting about this process is that it is
possible to retrieve the original message from any ![]() elements
of
elements
of ![]() and their corresponding rows in the
matrix [18].
and their corresponding rows in the
matrix [18].
(b) Adding redundancy to graph establishment phase:
Instead of slicing the per-node information into ![]() independent
pieces that are all necessary for decoding, we use
independent
pieces that are all necessary for decoding, we use ![]() dependent
slices. Replace Eq. 3 with:
dependent
slices. Replace Eq. 3 with:
(c) Adding redundancy to the data transfer phase:
As mentioned earlier, the source encrypts the data with the symmetric
key it sent to the destination during path establishment. The source
then chops the encrypted message into ![]() pieces, creating a message
vector
pieces, creating a message
vector ![]() . Before it sends the message, however, it multiplies
it by a random matrix
. Before it sends the message, however, it multiplies
it by a random matrix ![]() of size
of size ![]() and rank
and rank ![]() , where
, where
![]() . This creates
. This creates ![]() data slices that the source sends along
data slices that the source sends along
![]() disjoint paths. The destination can recover the original
information as long as it receives any
disjoint paths. The destination can recover the original
information as long as it receives any ![]() slices out of the
slices out of the ![]() data
slices the source created.
data
slices the source created.
We use network coding to solve the problem.
Network coding allows intermediate nodes to code the
data too.
In our scheme, during the data transmission phase,
a relay can easily restore the redundancy after its parent
fails. To do so, the relay creates a linear combination of the slices it
received, i.e.,
![]() , where
, where ![]() are random
numbers. The relay also creates
are random
numbers. The relay also creates
![]() , where
, where
![]() are the same numbers above. The new slice is the
concatenation of
are the same numbers above. The new slice is the
concatenation of ![]() and
and ![]() and can effectively replace
the lost slice. Any relay that receives
and can effectively replace
the lost slice. Any relay that receives ![]() or more slices can
replace all lost redundancy.
Thus, with a small amount of redundancy, we can survive many node failures
because at each stage the nodes can re-generate the lost redundancy.
or more slices can
replace all lost redundancy.
Thus, with a small amount of redundancy, we can survive many node failures
because at each stage the nodes can re-generate the lost redundancy.
A pi-secure information slicing algorithm implies that to
decrypt a message, an attacker needs to obtain all ![]() information
slices; partial information is equivalent to no information at all.
The proof of the following lemma is in a technical
report [19]:
information
slices; partial information is equivalent to no information at all.
The proof of the following lemma is in a technical
report [19]:
We note that there are many types of security, e.g., cryptographic
security, pi-security, and information theoretic security. The
strongest among these is information theoretic security. Information
slicing can be made information theoretically secure, albeit with
increased overhead. Instead of chopping the data into ![]() parts and
then coding them, we can combine each of the
parts and
then coding them, we can combine each of the ![]() parts with
parts with ![]() random parts. This will increase the space required
random parts. This will increase the space required ![]() -fold, but
provides extremely strong information-theoretic security.
-fold, but
provides extremely strong information-theoretic security.
and is usually
expressed in comparison with the maximum anonymity possible in such a
system, i.e.:
Note that
![]() is quite high. It does not mean that the
attacker knows the source or the destination with probability
is quite high. It does not mean that the
attacker knows the source or the destination with probability ![]() . Rather it
means the attackers are still missing half the information necessary
to discover the anonymous source or destination.
. Rather it
means the attackers are still missing half the information necessary
to discover the anonymous source or destination.
We assume that the source picks the relays randomly from the set of all nodes in the network, and that every node appears only once in the anonymity graph. These assumptions degrade anonymity, making our results conservative.
In each simulation, we randomly pick ![]() nodes to be
controlled by the attacker, where
nodes to be
controlled by the attacker, where ![]() is the number of overlay nodes.
Then we pick
is the number of overlay nodes.
Then we pick ![]() nodes randomly and arrange them into
nodes randomly and arrange them into ![]() stages of
stages of ![]() nodes each. We randomly pick the destination out of the
nodes on the graph. We identify the malicious nodes in the graph and
analyze the part of the graph known to the attacker. Once we know the
part of the graph known to the attacker, the anonymity for that
particular scenario is computed. The details of how to compute
source and destination anonymity for a particular simulation scenario
are kept in a technical report [19].
Depending on the random assignment, the part of the graph known to the
attacker will vary and so will the anonymity. Hence the simulation
procedure is repeated
nodes each. We randomly pick the destination out of the
nodes on the graph. We identify the malicious nodes in the graph and
analyze the part of the graph known to the attacker. Once we know the
part of the graph known to the attacker, the anonymity for that
particular scenario is computed. The details of how to compute
source and destination anonymity for a particular simulation scenario
are kept in a technical report [19].
Depending on the random assignment, the part of the graph known to the
attacker will vary and so will the anonymity. Hence the simulation
procedure is repeated ![]() times and the average anonymity is
plotted.
times and the average anonymity is
plotted.
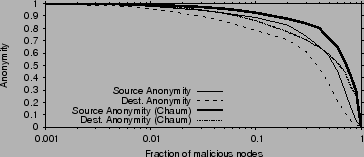 |
In this section we evaluate the anonymity provided by information
slicing and compare it to Chaum mixes. Consider attackers who
compromise a fraction ![]() of all nodes or links and collude together
to discover the identities of the source and destination.
Fig. 7 plots the anonymity of the source and
destination as functions of the fraction of compromised nodes, for the
case of
of all nodes or links and collude together
to discover the identities of the source and destination.
Fig. 7 plots the anonymity of the source and
destination as functions of the fraction of compromised nodes, for the
case of
![]() . When less than
. When less than ![]() of the nodes in the
network are malicious, anonymity is very high and comparable to Chaum
mixes, despite no keys. As the fraction of malicious nodes increases,
the anonymity falls. But even when the attackers control half of the
nodes, they are still missing half the information necessary to detect
the source or destination. Destination anonymity drops faster with
increased
of the nodes in the
network are malicious, anonymity is very high and comparable to Chaum
mixes, despite no keys. As the fraction of malicious nodes increases,
the anonymity falls. But even when the attackers control half of the
nodes, they are still missing half the information necessary to detect
the source or destination. Destination anonymity drops faster with
increased ![]() because discovering the destination is possible if the
attacker controls any stage upstream of the destination, while
discovering the source requires the attacker to control stage 1, as
we show in [19].
because discovering the destination is possible if the
attacker controls any stage upstream of the destination, while
discovering the source requires the attacker to control stage 1, as
we show in [19].
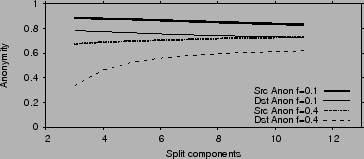 |
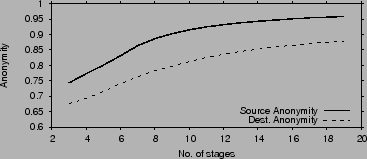
Fig. 8 plots source and destination anonymity as
functions of the splitting factor ![]() . When
. When ![]() is low, information
leakage is due primarily to the malicious nodes knowing their
neighbors on the graph. In this case, increasing
is low, information
leakage is due primarily to the malicious nodes knowing their
neighbors on the graph. In this case, increasing ![]() increases the
exposure of non-malicious nodes to attackers which results in a slight
loss of anonymity. When
increases the
exposure of non-malicious nodes to attackers which results in a slight
loss of anonymity. When ![]() is high, information leakage is mainly
due to attackers being able to compromise entire stages. Hence,
increasing
is high, information leakage is mainly
due to attackers being able to compromise entire stages. Hence,
increasing ![]() increases anonymity. However, even an anonymity as low
as 0.5 is fairly strong; it means that the attacker is still missing
half the bits necessary to identify the source/destination.
increases anonymity. However, even an anonymity as low
as 0.5 is fairly strong; it means that the attacker is still missing
half the bits necessary to identify the source/destination.
Fig. 9 plots the source and destination anonymity
as functions of the path length ![]() . Both source and destination
anonymities increase with
. Both source and destination
anonymities increase with ![]() . The attacker knows the source and
destination have to be on the graph; thus, for moderate values of
. The attacker knows the source and
destination have to be on the graph; thus, for moderate values of ![]() ,
putting more nodes on the graph allows the communicators to hide among
a larger crowd.
,
putting more nodes on the graph allows the communicators to hide among
a larger crowd.
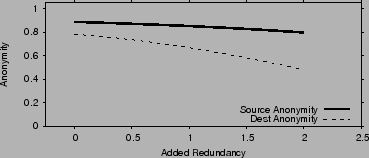 |
We also evaluate how anonymity and churn resilience trade off against
each other. The theoretical analysis is
in [19]. Fig. 10 plots the source
and destination anonymity as functions of the redundancy added to
combat churn. Redundancy is calculated as ![]() , and in the
figure
, and in the
figure ![]() . As the added redundancy increases, it becomes more
likely that the attacker compromises an entire stage of nodes. Hence
destination anonymity decreases. Source anonymity is not much
affected because it depends on whether specifically the first stage is
compromised.
. As the added redundancy increases, it becomes more
likely that the attacker compromises an entire stage of nodes. Hence
destination anonymity decreases. Source anonymity is not much
affected because it depends on whether specifically the first stage is
compromised.
The overhead of information slicing is low. We have performed
benchmarks on a Celeron ![]() MHz machine with
MHz machine with ![]() MB RAM connected to
the local
MB RAM connected to
the local ![]() Gbps network. Coding and decoding require on average
Gbps network. Coding and decoding require on average ![]() finite-field multiplications per byte. Hence, the maximum achievable
throughput is limited by how fast the multiplications can be
accomplished. For
finite-field multiplications per byte. Hence, the maximum achievable
throughput is limited by how fast the multiplications can be
accomplished. For ![]() , coding takes on average
, coding takes on average ![]() per 1500B
packet, which limits the maximum output rate to
per 1500B
packet, which limits the maximum output rate to ![]() Mbps. The memory
footprint is determined by
Mbps. The memory
footprint is determined by ![]() , since we need the
, since we need the ![]() packets to
generate outgoing coded packets. Thus the memory consumed for packet
storage is
packets to
generate outgoing coded packets. Thus the memory consumed for packet
storage is
![]() which is negligible.
which is negligible.
 |
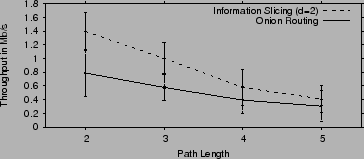 |
The overhead of information slicing in path setup is higher compared
to onion routing. Specifically, since each message is split into ![]() components, and each node outputs
components, and each node outputs ![]() packets in every round, the
total number of packets between any two stages is
packets in every round, the
total number of packets between any two stages is ![]() . For onion
routing
. For onion
routing ![]() , whereas
, whereas ![]() can be varied in information slicing. But
on the other hand, information slicing delivers higher throughput,
since it used
can be varied in information slicing. But
on the other hand, information slicing delivers higher throughput,
since it used ![]() parallel paths to deliver the data.
parallel paths to deliver the data.
 |
We examine how the throughput scales as the number of sources using
the anonymizing overlay increases. Fig. 13 shows the
total throughput as a function of the average load on the
overlay nodes. The total throughput is the sum of the throughputs of
the anonymous flows in the experiment. Load is quantified as the
number of concurrent anonymous flows using the overlay. The experiment
is performed on a set of ![]() PlanetLab nodes that have long uptimes,
so that churn does not affect the result (for churn results
see 8). We set
PlanetLab nodes that have long uptimes,
so that churn does not affect the result (for churn results
see 8). We set ![]() and
and ![]() , hence each
flow uses
, hence each
flow uses ![]() nodes from the set of
nodes from the set of ![]() nodes.
nodes.
The figure shows that, as load increases, the total throughput scales linearly. At significantly high load, the throughput levels off and the overlay reaches saturation. The saturation threshold is a function of the used set of PlanetLab nodes and the loads imposed on these nodes by other users/experiments. Information slicing therefore scales well with the amount of load placed on the overlay up to moderate loads.
 |
Fig. 14 plots the average graph setup times on the
local-area network. As one would expect, the setup time increases with
increased path length ![]() and splitting factor
and splitting factor ![]() . A large
. A large ![]() affects the setup time because a relay has to wait to hear from all of
its
affects the setup time because a relay has to wait to hear from all of
its ![]() parents and thus, the delay at each stage will be dominated by
the slowest relay in that stage. In general however, the setup time
is less than a couple of seconds. Furthermore, for
parents and thus, the delay at each stage will be dominated by
the slowest relay in that stage. In general however, the setup time
is less than a couple of seconds. Furthermore, for ![]() , the setup
time is a few hundred milliseconds.
, the setup
time is a few hundred milliseconds.
We repeat the same experiments on PlanetLab to measure how much the conditions in the wide area network affect our setup times. Fig. 15 shows the average graph setup times in that environment. The setup times have increased beyond their values in the local-area network because of the larger RTT, but more importantly because PlanetLab nodes have a high CPU utilization leading up to the conference deadline. Despite this increase, the setup time is still within a few seconds.
 |
Churn is an inescapable reality of dynamic peer-to-peer overlay networks. In §4.4 we presented a novel technique that recreates lost redundancy to combat churn. Here we evaluate its performance via analysis and an actual implementation. First we show analytically how coding helps us achieve high resilience with a small amount of added redundancy. Then we evaluate information slicing's churn resilience on PlanetLab and show that it can successfully cope with failures and make long anonymous transfers practical.
Imagine making onion routing resilient to failures by having the
sender establish multiple onion-routing paths to the destination. The
most efficient approach we can think of would allow the sender to add
redundancy by using erasure codes (e.g., Reed-Solomon codes) over
multiple onion routing paths. Assuming the number of paths is ![]() ,
and the sender splits the message into
,
and the sender splits the message into ![]() parts, she can then recover
from any
parts, she can then recover
from any ![]() path failures. We call this approach onion
routing with erasure codes. Recall that in information slicing as
well, the sender adds redundancy by increasing the number of paths
path failures. We call this approach onion
routing with erasure codes. Recall that in information slicing as
well, the sender adds redundancy by increasing the number of paths ![]() , i.e.,
, i.e., ![]() slices of information are expanded to
slices of information are expanded to ![]() slices. But
the key difference in information slicing is that relays inside
the overlay network can regenerate lost redundancy.
slices. But
the key difference in information slicing is that relays inside
the overlay network can regenerate lost redundancy.
To evaluate analytically, consider a message of ![]() bytes. Suppose a sender has sent
bytes. Suppose a sender has sent ![]() bytes,
where
bytes,
where ![]() is the
amount of redundancy in your transfer.
is the
amount of redundancy in your transfer. ![]() is also the
overhead in the system; it limits the useful throughput.
Now, let us compare the probability of successfully transferring the
data under our scheme and onion routing with erasure codes when the same amount
of redundancy is added.
In particular,
assume the path length is
is also the
overhead in the system; it limits the useful throughput.
Now, let us compare the probability of successfully transferring the
data under our scheme and onion routing with erasure codes when the same amount
of redundancy is added.
In particular,
assume the path length is ![]() , and that failures are independent
and the probability of a node failing is
, and that failures are independent
and the probability of a node failing is ![]() ,
the redundancy in both schemes is
,
the redundancy in both schemes is
![]() , hence
, hence ![]() .
.
Onion routing with erasure codes succeeds when there are at least ![]() operational paths.
A path is operational if none of the nodes on that path fail. Thus, the probability of a path
success is
operational paths.
A path is operational if none of the nodes on that path fail. Thus, the probability of a path
success is
![]() . The probability of the scheme succeeding is
the probability of having at least
. The probability of the scheme succeeding is
the probability of having at least ![]() non-failing paths, i.e.,
non-failing paths, i.e.,
Fig. 16 illustrates the two success probabilities as
a function of the amount of redundancy for ![]() , and
, and ![]() . The
probability of a node failure during the transfer is set to
. The
probability of a node failure during the transfer is set to ![]() in
the top graph and
in
the top graph and ![]() in the bottom graph. The figure shows that,
for the same amount of overhead, the slicing approach has a
substantially higher probability of successfully completing its
transfer.
in the bottom graph. The figure shows that,
for the same amount of overhead, the slicing approach has a
substantially higher probability of successfully completing its
transfer.
 |
 |
We complement the analytical evaluation with real experiments on a failure-prone
overlay network, i.e., the PlanetLab network. We run our experiments
with all nodes in our PlanetLab slice including the ones which are very failure
prone. ``Failure-prone'' are nodes which are often inaccessible due to myriad reasons,
either due to heavy CPU overload or network disconnectivity. These nodes
have short ``perceived'' lifetimes of less than ![]() minutes, and are extremely likely to
fail during an experiment.
The rationale for picking such nodes is that the sender usually has a list of
overlay nodes, some of which are up and some are down. The sender
cannot ping the nodes to identify the operational ones because this might jeopardize its anonymity.
minutes, and are extremely likely to
fail during an experiment.
The rationale for picking such nodes is that the sender usually has a list of
overlay nodes, some of which are up and some are down. The sender
cannot ping the nodes to identify the operational ones because this might jeopardize its anonymity.
We focus on the following question: ``Given PlanetLab churn rate and failures,
what is the probability of successfully completing a session that
takes ![]() minutes?''
Given the throughput figures presented earlier, a
minutes?''
Given the throughput figures presented earlier, a ![]() -minute flow can
transfer over
-minute flow can
transfer over ![]() MB, which is typical of P2P file transfers.
We compare information slicing with the modified version of onion
routing which has redundancy added as described in the previous section.
MB, which is typical of P2P file transfers.
We compare information slicing with the modified version of onion
routing which has redundancy added as described in the previous section.
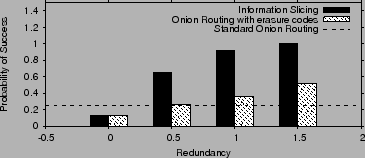
Fig. 17 compares the probability of successfully
finishing the transfer under our approach, standard onion routing (one
path), and onion routing with redundancy added using erasure codes.
As we saw in the previous section, for the same number of paths, onion
routing with erasure codes has the same level of redundancy as our
scheme. Redundancy is added by increasing the number of paths ![]() , in this case the added redundancy
, in this case the added redundancy ![]() is given by
is given by ![]() . The
results are for
. The
results are for ![]() and
and ![]() . We vary the level of added redundancy
by varying
. We vary the level of added redundancy
by varying ![]() , and measure the probability of successfully
completing a session lasting
, and measure the probability of successfully
completing a session lasting ![]() minutes.
minutes.
The figure shows that with standard onion routing completing such a transfer is extremely unlikely. The probability of success increases with onion routing with erasure codes but stays relatively low. In contrast, with information slicing, adding a little amount of redundancy results in a very high success probability, making such relatively long anonymous transfers practical.
In general, the best way to deal with denial of service attacks on anonymizing systems is to increase the size of the network. By allowing unmanaged peer-to-peer overlays with no trusted authority, our scheme has the potential to increase the size of these networks, thus increasing the resilience of the service.
In the second case, the sender does not have access to a pseudo-source
outside the firewall. In this case,
the sender chooses some of the relays in some stage ![]() to be outside the country
and the rest inside -i.e., the firewall does not cut the
graph at a single stage. For the firewall to be able to decipher the
message, it needs to pick the right
to be outside the country
and the rest inside -i.e., the firewall does not cut the
graph at a single stage. For the firewall to be able to decipher the
message, it needs to pick the right ![]() packets out of all packets
in a particular interval (say 0.5s).
These packets do not come from the same set of senders
(because of the cross-stage cut) and the bits in these packets are hard to correlate.
Furthermore, there are
potentially billions of packets traversing the firewall during that
interval. Picking the right
packets out of all packets
in a particular interval (say 0.5s).
These packets do not come from the same set of senders
(because of the cross-stage cut) and the bits in these packets are hard to correlate.
Furthermore, there are
potentially billions of packets traversing the firewall during that
interval. Picking the right ![]() packets therefore is a very difficult problem.
packets therefore is a very difficult problem.
There is always a tradeoff between robustness to attacks and increased overhead. Most solutions either send excessive amount of traffic or increase complexity making the system less usable. The right operation point usually depends on the application scenario. Our system focuses on providing practical low-delay anonymity for everyday applications rather than providing perfect anonymity at all costs. As mentioned in §3 we cannot protect against a global eavesdropper who can observe all traffic. Further if an attacker can snoop on all links leading to the destination, message confidentiality is compromised. But the attacker still cannot discover the identity of the sender.
Traffic analysis attacks become significantly harder to mount in a global overlay with thousands of nodes and a large amount of normal filesharing traffic. In predecessor attacks [30], the attacker forces frequent rebuilding of paths and tries to identify the sender and destination by identifying specific responders outside the overlay to which connections are made. For this attack, the attacker needs to observe all traffic across the global overlay which is unrealistic in practice. Murdoch et.al. [22] present an attack in which the attacker pings nodes in the overlay and identifies how the load offered by the adversary affects the delay of other anonymous communication streams at the source node. The attacker has to ping potentially thousands of nodes in the global overlay before he can observe any significant statistical change in the senders anonymous communication. Further the large amount of P2P filesharing traffic already present makes such attacks based on statistical analysis hard to mount in a global overlay network. We describe below some other specific traffic analysis attacks and how our system protects against them.
(a) Inserting a pattern in the data:
Colluding attackers who are not in consecutive stages might try to track a
connection by inserting a particular pattern in the packet and
observing the path of the inserted pattern downstream.
To prevent such attacks the sender makes the nodes along
the path intelligently scramble each slice such that no pattern can
percolate through the network. We will demonstrate the algorithm through a
single slice ![]() , which belongs to an intermediate
node
, which belongs to an intermediate
node ![]() in stage
in stage ![]() . As we have seen before this slice passes through
. As we have seen before this slice passes through ![]() nodes before it reaches node
nodes before it reaches node ![]() .
Before transmitting the slice, the sender passes the
slice through
.
Before transmitting the slice, the sender passes the
slice through ![]() random transformations
random transformations
![]() successively. Now the sender has to ensure that when node
successively. Now the sender has to ensure that when node ![]() receives the
slice, all of these random transformations have been removed, else the slice
will be useless to node
receives the
slice, all of these random transformations have been removed, else the slice
will be useless to node ![]() . Therefore the sender confidentially sends each of the inverses
of the
. Therefore the sender confidentially sends each of the inverses
of the ![]() random transformations applied above to the
random transformations applied above to the ![]() nodes which handle this slice.
Each intermediate node applies one inverse transform to the slice
nodes which handle this slice.
Each intermediate node applies one inverse transform to the slice ![]() , hence by
the time the slice reaches node
, hence by
the time the slice reaches node ![]() , the slice is through
, the slice is through ![]() inverse
transformations and is back to its original
unmodified state. Node
inverse
transformations and is back to its original
unmodified state. Node ![]() can then decode and recover his own information.
can then decode and recover his own information.
The source repeats this process for all slices. This ensures that a slice is guaranteed to not look the same at any two links in the graph. Hence though the attacker might insert a particular pattern, the pattern will change in the immediate next stage without the attacker knowing how it changed. As a result, colluding non-consecutive attackers never see the same bit pattern, thereby nullifying the attack.
(b) End-to-End Time analysis attacks: The attacker may study the timing pattern in the traffic at various nodes in the overlay network in an attempt to identify where an anonymous flow enters and exits the overlay. Feamster et al [14] have shown that such an attack is possible in the Tor network. In particular, they report that Tor [12] has many nodes in the same AS. Hence, it is probable that the entry and exit nodes of an anonymous flow end up in the same AS. If this AS is adversarial, it can conduct timing analysis attacks to determine the sender and receiver. This attack becomes much harder in a large peer-to-peer overlay. In a large peer-to-peer network spread across the world, it is unlikely that a significant fraction of the nodes belong to the same AS. Furthermore, the node selection strategy outlined in §9.1 ensures that nodes are picked from different ASes, hence it is significantly hard for any single AS to mount a timing analysis attack.
(c) Resilience to packet size analysis: Looking at Fig. 4, the reader may think that the packet size decreases as it travels along the forwarding graph, and thus the attacker can analyze the position of a relay on the graph by observing the packet size. This is not the case, however. As explained in §4.3.4, each relay replaces its own information slices with random padding and shuffles the slices according to the sender's instructions sent in the slice-map. The map ensures that the packet size stays constant.
This document was generated using the LaTeX2HTML translator Version 2002-2-1 (1.71)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons paper.tex
The translation was initiated by Sachin Katti on 2007-02-22