Jacob Sorber
Nilanjan Banerjee
Mark D. Corner
Sami Rollins
![]()
Department of Computer Science
University of Massachusetts, Amherst, MA
{sorber, nilanb, mcorner}@cs.umass.edu
![]() Department of Computer Science
Department of Computer ScienceMt. Holyoke College, South Hadley, MA
srollins@mtholyoke.edu
Maintaining optimal consistency in a distributed system requires that nodes be always-on to synchronize information. Unfortunately, mobile devices such as laptops do not have adequate battery capacity for constant processing and communication. Even by powering off unnecessary components, such as the screen and disk, current laptops only have a lifetime of a few hours. Although PDAs and sensors are similarly limited in lifetime, a PDA's power requirement is an order-of-magnitude smaller than a laptop's, and a sensor's is an order-of-magnitude smaller than a PDA's. By combining these diverse platforms into a single integrated laptop, we can reduce the power cost of always-on operation. This paper presents the design, implementation, and evaluation of Turducken, a Hierarchical Power Management architecture for mobile systems. We focus on a particular instantiation of HPM, which provides high levels of consistency in a laptop by integrating two additional low power processors. We demonstrate that a Turducken system can provide battery lifetimes of up to ten times that of a standard laptop for always-on operation and three times for a system that periodically sleeps.
D.4.7[Operating Systems]: Organization and Design--distributed systems, interactive systems, real-time and embedded systems; D.4.8[Operating Systems]: Performance--measurements; D.4.4[Operating Systems]: Communications Management--network communication;
Management, Measurement, Performance
Power management, pervasive computing, mobile computing, low-power computing.
The performance and utility of any distributed system is impacted by the availability of the participating nodes. In order to execute tasks remotely and maintain consistency of distributed data stores, nodes must be powered on and connected to one another. These requirements are difficult to support in a wired environment; if the participating nodes are mobile, it becomes even more of a challenge. It is particularly difficult to ensure that a mobile node remains always-on to participate in the system.
Mobile devices are unique in that they have finite lifetimes. In larger mobile devices, such as laptops, aggressive power management is often used to extend device lifetime by reducing the amount of time the device remains on. Although PDAs and sensors are similarly limited in lifetime, a PDA's power requirement is an order-of-magnitude smaller than a laptop's and a sensor's is another order-of-magnitude smaller than a PDA's. However, these reduced power draws come at the price of reduced functionality and computational power.
This paper presents the design, implementation, and evaluation of Turducken, a mobile device architecture that enables full device functionality, always-on availability, and extended device lifetime. Turducken integrates several mobile computing platforms that operate at different power levels into a single multi-tiered device that can operate at the power level of any one of its tiers. While the system supports all of the functionality of its highest power tier, it can utilize lower power subsystems to execute simpler tasks, thus reducing the system-wide power consumption and extending the system lifetime. Moreover, by integrating an always-on tier such as a sensor, we can achieve always-on availability.
Because maintaining consistency of distributed data stores is one of the most integral tasks for mobile distributed systems, we focus our attention on Turducken's ability to maintain high levels of consistency. Our evaluation compares several Turducken configurations running three common, data-driven applications: time synchronization, web caching, and email. Our results indicate that a Turducken system that integrates an x86-based laptop with a StrongARM and a sensor provides the same level of consistency as a standard laptop computer; however, it lasts up to ten times as long for always-on operation and three times for a system that periodically sleeps. Additionally, we present a theoretical analysis of the lifetime gain of using a Turducken system to execute any task. This analysis demonstrates that Turducken is useful for a broad set of distributed services.
In Section 2 we provide further motivation and introduce the Turducken approach. Section 3 describes the design of the hardware components as well as the software architecture. Section 4 presents a prototype implementation, which we evaluate in Section 5. Section 6 presents related work, and we conclude in Section 7.
A fundamental goal in mobile distributed systems is providing consistency between data stores. Distributed file systems, databases, and applications such as email and the web demand that a user's local view of data be consistent with the view at other nodes in the system. This consistency is ensured through frequent synchronization between nodes. For two end-points to maintain optimal consistency, they must both be always connected and always powered on. Unfortunately, if either node is mobile, the system cannot make this guarantee and consistency is sacrificed.
The lack of a network connection between two nodes is primarily attributable to physical proximity and wireless network coverage. Network partitions can also be the result of several other factors, including: firewalls; integration of inexpensive short-range wireless connections in consumer devices; or location-based services that intentionally make services only available in specific physical locales. While an end system can attempt to mask these disconnections, it can do little to affect the infrastructure that provides connectivity.
Even if a network path does exist between two end-points, in a mobile system there is no guarantee that both nodes will be powered on. Mobile nodes have a finite energy supply and thus a finite lifetime. A node may be off because it has exhausted its battery supply, because it has intentionally powered down to conserve energy, or because the user has turned off the device. In any case, if the node performing synchronization or the node with the most recent version of the file is not on, then synchronization cannot occur. Traditionally, mobile systems address these problems by attempting to mitigate their effects. For example, many systems cache and buffer updates and opportunistically perform synchronization when nodes are powered on and connected. Similarly, many systems support weak-consistency models. This ensures that the system can be used locally and remotely even if nodes are disconnected or off. In essence, these techniques allow the system to function even if data stores are not consistent; however, as data stores become increasingly inconsistent, they also become less valuable.
To achieve high levels of consistency, mobile nodes must be powered on as much as possible so they may take advantage of network connectivity when it exists and may perform synchronization as frequently as possible. This requires that a device be on and consuming energy, even when no useful tasks can be accomplished. For instance, ensuring that a user's mail is immediately delivered to a mobile device requires that the device to be powered on, even when no new mail is arriving. This approach can be very energy inefficient, thus negatively impacting the lifetime of the system.
One approach to reducing energy consumption is to leave the mobile device in an always-on mode, but turn off the screen, aggressively spin down the disk [4,3,8], scale the CPU voltage and frequency [30,7,5,15,5], manage wireless interface usage [1], turn off banks of RAM [12,16,9,18], and recompile programs for low power operation [28]. Unfortunately, we observe that a sample laptop using many of these methods only has a lifetime of approximately 8 hours and a standard PDA only lasts for 14 hours. To keep a device in an always-on state requires the user to charge it several times a day, even if it is not actively used. These low-power modes were designed to save power while providing interactivity, not to enable always-on functionality.
Another approach is to suspend the device, refreshing only the RAM, and wake up at periodic intervals to perform synchronization (e.g., download web updates). For instance, to extend the lifetime of an IBM Thinkpad to 3 days, we can wake the laptop for approximately 2 minutes of every hour. However, there is a trade-off between the frequency with which we wake the device and the level of consistency maintained: waking up more often costs more energy, but provides higher consistency. Additionally, there is no guarantee that a device will be in range of a network and able to perform synchronization when it wakes. An approach such as Wake-on-Wireless [24] can reduce the amount of energy spent waking a device if no network connectivity exists. However, a significant amount of energy is still wasted if a high-power device, such as a laptop, wakes to discover that a network connection exists but no updates are ready (e.g., no new mail has arrived or a cached web page has not changed).
While these approaches provide considerable energy savings, they are inappropriate for extending the maximum lifetime of the device while providing high consistency. This is because they fail to address the non-reducible power of mobile devices [14], which dominates the lifetime of the battery. The reducible power is the amount of power that can be eliminated from a running system while maintaining the ability to do computation. Common sources of non-reducible power include the power supply, the on-board oscillators, the memory and I/O buses, and the limited range of frequency and voltage scaling [2]. Some small embedded systems have proposed using multiple processor cores that can be shut off [19,11]. However, such a system only reduces the power draw of the processor, which constitutes less than 10% of the power consumed by a laptop [2]. Even the most highly-optimized laptop computer incurs a significant energy cost to wake up and download a piece of data.
The amount of non-reducible power varies for different devices. For example, the non-reducible power of a StrongARM-based PDA is on the order of twenty-times smaller than the non-reducible power of an x86-based laptop. As another example, the non-reducible power of a small sensor is significantly smaller than that of a device such as a wireless music player. Typically, devices are carefully optimized to provide their promised functionality at the lowest possible energy cost, and devices that provide less functionality have smaller non-reducible power. Fortunately, there is significant overlap in the functionality provided by high-power and low-power devices. For example, maintaining a consistent view of a file requires only the ability to connect to a network and download data; a variety of devices can provide this functionality.
The goal of our approach, Turducken, is to reduce the energy cost of maintaining high levels of consistency on mobile devices by combining several optimized mobile platforms into one integrated system. By combining a very low-power platform such as an ATmega-based sensor with a very high-power platform such as a laptop, we can produce a system that can be always-on and still have all of the functionality of a laptop computer.
The system is composed of a set of tiers, each with a set of capabilities and a power mode. The system as a whole executes tasks (e.g., downloads data updates) by waking the tier that has the capabilities to execute the task in the most efficient manner. For example, one tier might include a StrongARM processor, along with its memory and storage. This tier could be integrated with a standard x86-based laptop. We can then suspend the x86-tier and rely upon the StrongARM-tier to wakeup and perform periodic tasks.
For instance, if the StrongARM-tier wakes up periodically to cache a copy of frequently-used web pages, when the user opens the laptop, those pages will be available and highly consistent. If the laptop alone were to frequently wake itself up and cache those same pages, it would attain the same level of consistency; however, the overall lifetime of the system would be greatly diminished.
Note that in this integrated system all of the tiers use a common battery, are connected by a common bus, and effectively form a tightly coupled distributed system. However, from the user's perspective it appears to be a normal laptop. The addition of extra components does increase the weight and cost of a mobile system. For instance, adding a StrongARM mobile processor and memory to the inside of a laptop may add $100 and a few ounces. However, the extra capabilities the system provides outweigh these costs. Another observation is that this system could be commercially built using commodity components. The architecture is fully composable: any set of tiers can be used together to give a wide variety of power modes and can be applied to many mobile devices.
We can demonstrate Turducken's effectiveness using a simplified analysis of the expected gains in the lifetime of the system. Here we analyze the expected lifetimes of two different systems. The first is a normal laptop that wakes up periodically to synchronize and goes back to sleep. The second is a simplified Turducken system that consists of an x86-tier integrated with a StrongARM-tier; the x86-tier remains suspended, while the StrongARM-tier periodically wakes up and performs the same synchronization task.
Our analysis shows that there are two circumstances in which Turducken provides gains in the system lifetime: 1) if the fraction of time the laptop spends awake is large enough to overcome the extra burden of the StrongARM-tier's suspension power, and 2) if the time in which the StrongARM-tier can perform the synchronization task is a reasonable multiple of the time the x86-tier takes.
The first equation details the lifetime of a laptop that wakes at periodic intervals:
| (1) |
where ![]() is the capacity of the battery,
is the capacity of the battery, ![]() is the fraction
of time the laptop spends awake,
is the fraction
of time the laptop spends awake, ![]() is the power it expends
while awake,
is the power it expends
while awake, ![]() is the fraction of time the laptop spends
asleep, and
is the fraction of time the laptop spends
asleep, and ![]() is the power it expends while suspended.
is the power it expends while suspended.
The lifetime of a Turducken system, consisting of an x86-tier paired with a StrongARM-tier, can be represented as:
| (2) |
where ![]() and
and ![]() are the fraction of time and power
the StrongARM tier spends awake, and
are the fraction of time and power
the StrongARM tier spends awake, and ![]() and
and ![]() are
the fraction of time and power the StrongARM tier spends suspended
respectively.
are
the fraction of time and power the StrongARM tier spends suspended
respectively. ![]() is the battery capacity. The x86-tier remains
suspended while the StrongARM-tier wakes up. Thus the x86-tier
expends
is the battery capacity. The x86-tier remains
suspended while the StrongARM-tier wakes up. Thus the x86-tier
expends ![]() all of time.
all of time.
Using these two equations we can express the gain of the Turducken system as the ratio of the lifetime of the Turducken system to that of a standard laptop:
| (3) |
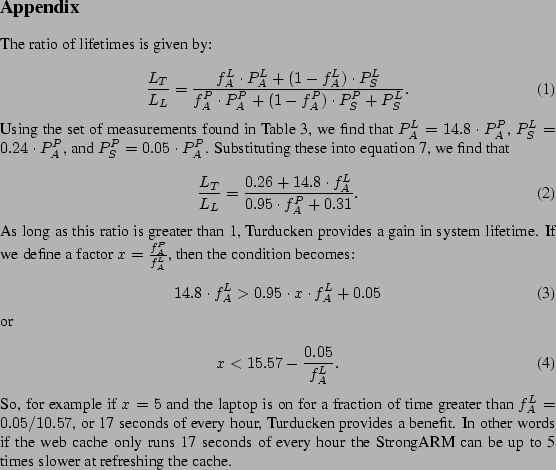
As long as this ratio is greater than one, Turducken has a positive impact on the lifetime of the system. Using the proof found in the appendix and a set of measurements taken from a prototype system running the web caching application, described in Section 4, we find that if the web caching application only runs 17 seconds of every hour, then the StrongARM-tier can perform the synchronization task up to 5 times slower than the x86. In fact, because web caching is network bound, the ratio of execution time is actually one-to-one, and for reasonable levels of consistency the web caching application runs much more than 17 seconds of every hour. Because of these two factors, Turducken typically provides an increase in lifetime substantially greater than this lower bound.
The remainder of this paper describes the design and prototype implementation of the hardware and software components of our system. Additionally, we present a set of experiments which quantify the benefits of using the Turducken system.
The design of a Turducken system is composed of three parts: the hardware, the underlying system architecture, and the model for distributing applications across the tiers. In general, the design is similar to many distributed systems; each tier is under autonomous control while decisions are made in a distributed manner. Client applications reside at the most powerful tier, and tasks that support those applications are distributed among the various tiers.
A Turducken system is designed in a strictly hierarchical manner, and each tier is more powerful than any tier below it. Each tier can communicate with a superior tier and an inferior tier--the two exceptions being the top and bottom of the hierarchy. Communication occurs via a local communication network and the tiers are connected to a common power source. Moreover, each tier has the ability to draw its superior tier out of a suspended mode. It is fully composable; the system will still operate correctly if tiers are added, removed, or changed. This provides a flexible architecture that can accommodate the evolving number of hardware platforms available in low-power computing. An overview diagram of our design is shown in Figure 1.
Each tier contains an independent processor, memory, internal bus, and persistent storage system. Each may also have an independent external wireless network interface, although these can be shared by routing through the inter-tier communication network. The set of tiers can be architecturally homogeneous and span a range of power requirements. By limiting the interface between tiers, we achieve composability. Integrating new tiers with differing instruction sets, capabilities, operating systems, and power requirements is straightforward.
A Turducken system is also fully autonomous and does not depend on any special hardware from the external network. For instance, Turducken does not require external networks to be equipped with hardware wakeup signals, such as those used in the Wake-On-Wireless project [24]. This ensures that the system will work with high-powered access points, as well as low-power, peer-to-peer, wireless devices. Because there is no dependence on the external, wireless networking hardware, Turducken will work with any radio interface, as well as accommodate multiple radios in the same system.
The system as a whole is responsible for accepting tasks from the user and executing them in a way that extends the lifetime of the system. Tasks can be anything from keeping the time synchronized to ensuring that the local copy of the user's email is current. The user, or a service executing on behalf of the user, introduces tasks at the highest level and the system distributes these tasks among the different tiers in a way that extends the lifetime of the overall system. Each tier is capable of several operations: perform tasks or discover services; inform other tiers when necessary; and manage its local consumption of power. We discuss each responsibility in more detail below.
There are several methods of distributing application responsibilities over the tiers. We describe each of these options here:
To demonstrate the efficacy of our approach, and to provide a test platform for our work, we have built a prototype Turducken system. The prototype currently consists of a hardware implementation and three applications: time synchronization, web caching, and IMAP synchronization.
|
The hardware prototype, shown in Figure 2, consists of three tiers: an x86-based IBM Thinkpad X31, a Compaq iPAQ 3870 StrongARM-based PDA, and a CrossBow Mica2Dot ATMega-based Mote. The Mote and iPAQ are directly connected via a serial interface and the iPAQ and the laptop are directly connected via a USB interface. The Mote can wake the iPAQ through the use of the serial DCD line, and the iPAQ can wake the laptop by sending a request to the Mote, which wakes the laptop by triggering a relay connected to the keyboard. Our prototype can currently be reconfigured as: x86, x86+ATMega, or x86+StrongARM+ATMega. Each tier also contains a real-time clock (RTC) that can generate a wake interrupt. If we reconfigure the system as x86 only, it can suspend itself and use its RTC to wake it at set intervals.
This prototype differs from our design in three significant ways. First, the hardware components are all physically separate--a deployed system would integrate all of the components into a laptop form-factor. The connections shown in the picture would all be internal to the system. Second, there is a plethora of extra parts in our prototype. An integrated implementation would eliminate much of the PDA, including its screen, sleeve, and buttons. Third, each tier is run from its own battery. The Turducken design assumes that there is only a single, shared battery. This has implications for how we evaluated the system, as we explain in the evaluation section.
In our implementation, there are two types of wireless interfaces: WiFi and the Mote's custom radio interface. There are both advantages and disadvantages to having access to multiple wireless standards. It does allow the system to take advantage of a broader range of services by allowing it to communicate with more devices; however, it makes system design more challenging since certain tasks may require a particular interface and cannot be accomplished by all tiers. To mitigate this disadvantage, we have attached a WiFi detector to the Mote. The detector can determine if WiFi signals are present, though it cannot communicate using WiFi or discover if an access point is open or closed.
Even though the x86 and StrongARM tiers each have WiFi interfaces, there is no reason to use them both in the Turducken system. In a configuration that includes both, we turn off the x86-tier's interface and route all traffic through the StrongARM-tier. This saves power, thus extending the battery lifetime of the system.
We have developed and deployed three applications that are representative of commonly-used mobile distributed services: time synchronization, web caching, and IMAP synchronization. Time synchronization is necessary for timestamping distributed updates and determining timeouts in soft-state protocols. Web caching on mobile devices allows the mobile node to serve pages during periods of disconnection and improves response time when connected. IMAP synchronization maintains a local mail cache that can serve mail during periods of disconnection and improves response time. In addition, a local IMAP store can buffer outgoing mail and send it when the node is connected.
|
These applications also represent three broader classes of applications. These classes are defined by the traits listed in Table 1. Time synchronization represents applications that require limited processing and limited transmission of incoming data updates. Web caching represents applications that require more significant processing and larger amounts of incoming data. This is similar to a variety of publish-subscribe systems. IMAP synchronization represents applications that require fairly significant processing and support for outgoing as well as incoming updates. This is similar to the requirements of distributed file and database systems, though the consistency requirements are not as strict.
The time synchronization application follows the system-aware
programming model. The ATmega-tier runs a custom built Network Time
Protocol (NTP) client that synchronizes its local clock with a known
time server every ![]() seconds. The StrongARM and x86 tiers can then request
the current time from the ATmega-tier and update their local clocks. We
define an explict API for this communication. When the ATmega-tier is not
present, the the x86-tier uses its RTC to wake every
seconds. The StrongARM and x86 tiers can then request
the current time from the ATmega-tier and update their local clocks. We
define an explict API for this communication. When the ATmega-tier is not
present, the the x86-tier uses its RTC to wake every ![]() seconds and
synchronize with the remote time server using the UNIX utility
ntpdate.
seconds and
synchronize with the remote time server using the UNIX utility
ntpdate.
The web cache application follows a proxy-based programming model.
The ATmega-tier detects the presence of a WiFi signal; the StrongARM-tier runs a
Squid proxy cache; and the x86-tier runs a web browser. Every ![]() seconds,
the ATMega determines whether a WiFi connection is available and, if
so, wakes the StrongARM-tier. The StrongARM-tier remains awake for 30 seconds
while the proxy continuously fetches expired cache items. Web
requests originating from the web browser running on the x86-tier are
routed through the StrongARM-tier. These requests can be transparently
serviced by the proxy when no network connection is available.
seconds,
the ATMega determines whether a WiFi connection is available and, if
so, wakes the StrongARM-tier. The StrongARM-tier remains awake for 30 seconds
while the proxy continuously fetches expired cache items. Web
requests originating from the web browser running on the x86-tier are
routed through the StrongARM-tier. These requests can be transparently
serviced by the proxy when no network connection is available.
When the StrongARM-tier is not present, the Squid proxy runs on the x86-tier and
the cache is stored on the system's hard disk. The ATmega-tier or RTC
wakes the x86-tier every ![]() seconds. If a connection is present, it
remains awake for 30 seconds while the Squid proxy fetches expired
cache items. Again, the Squid proxy can transparently fulfill
requests from a web browser.
seconds. If a connection is present, it
remains awake for 30 seconds while the Squid proxy fetches expired
cache items. Again, the Squid proxy can transparently fulfill
requests from a web browser.
The IMAP synchronization application also follows a proxy-based
programming model. The ATmega-tier detects the presence of a WiFi signal
and the StrongARM-tier runs a UNIX utility named mailsync, which
performs synchronization between an IMAP server and a secondary
mail store. The x86-tier maintains the primary mail store and uses
mailsync to synchronize with the StrongARM-tier's secondary mail store. The
x86-tier also runs the user's mail client. Every ![]() seconds, the ATmega-tier
determines whether a WiFi connection is available and, if so, wakes
the StrongARM. The StrongARM-tier uses mailsync to retrieve
incoming mail from and send outgoing updates to the user's mail
server. Incoming mail is stored in the secondary mail store hosted on
the StrongARM-tier.
seconds, the ATmega-tier
determines whether a WiFi connection is available and, if so, wakes
the StrongARM. The StrongARM-tier uses mailsync to retrieve
incoming mail from and send outgoing updates to the user's mail
server. Incoming mail is stored in the secondary mail store hosted on
the StrongARM-tier.
When the user turns on the x86, it synchronizes its primary store with the secondary store on the StrongARM-tier. The user accesses mail by configuring the mail client to point to the primary mail store on the x86-tier. When the user suspends the x86-tier, any changes the user has made will be synchronized with the StrongARM-tier which will synchronize with the remote mail server when connected.
In some cases, the user may receive pieces of mail that are too large to be stored in the StrongARM-tier's flash memory. To accomodate this scenario, the primary mail store also synchronizes with the remote mail server when possible. In addition, we would like to modify the StrongARM-tier to wake the x86-tier when it detects this situation, though we have not yet implemented this feature.
If the StrongARM-tier is not present, the x86-tier synchronizes directly with
the remote mail server when connected. Similar to the web cache, the
ATmega-tier or RTC wakes the x86 every ![]() seconds. If the x86-tier discovers
that no connection is present, it goes back into a suspended mode
without performing synchronization.
seconds. If the x86-tier discovers
that no connection is present, it goes back into a suspended mode
without performing synchronization.
Both the IMAP synchronization and the web caching applications were implemented using standard components. Due to the distributed nature of these applications, recoding is not necessary in order to deploy them on our prototype Turducken system. Each component can simply be recompiled for both the x86 and StrongARM architectures.
The primary goal of Turducken is to extend the lifetime of a mobile computing device while allowing it to remain aware of its environment when not actively in use. In our evaluation of the Turducken system, we measure the lifetime of several Turducken configurations running the following three sample applications: time synchronization, web caching, and IMAP synchronization. For each application, we compare the system lifetimes of different configurations with respect to data consistency. Finally, we focus on the web caching application and compare system performance with respect to variable network and service availability.
Our evaluation measures the lifetime of several system configurations running varied workloads. Measuring the lifetime of a Turducken system presents a number of interesting challenges. Explicitly measuring the lifetime of a single configuration running a single workload can take longer than a week. Collecting even a small number of data points using this method is impractical with only a single prototype system. Instead, for our experiments we measure the energy consumed by the system while performing tasks for the given workload and while in a suspended state. We use those values to calculate the total system lifetime.
Our prototype is powered by four individual batteries: one main battery for each tier and an additional battery in the iPAQ's expansion sleeve. Unfortunately, our power meter has only two measurement channels. As a result we are not able to derive detailed power traces for the system as a whole. We are currently working on a solution to this problem. Fortunately, we can calculate the lifetime of the system using only the average energy that is required to performing a given task. We make the assumption that the power draw of a full system will be no greater than the sum of the power draw of each tier. This estimate is conservative since an integrated system can use more power-efficient communication links between tiers.
For the experiments presented here, we measure the amount of energy consumed by each tier using the tier's native power management interface. Batteries used in modern mobile devices typically contain a gas gauge chip, such as the Texas Instruments BQ2011 chip used in the x86-tier's battery, which considers temperature, battery chemistry, and past usage to accurately compute the amount of energy remaining in the battery. While this approach does not provide detailed power traces, it does allow us to measure the energy consumed over a particular period of time. This is similar to the method used to measure power consumption of the Odyssey System [6].
Using this method we measure the energy consumed by each tier over a fixed period of time, and calculate the amount of time it takes the entire system to drain a full battery. This calculation depends on several factors: the average power draw of each tier while active; the average power draw of each tier while suspended; the amount of time each tier spends active; and the amount of time each tier is suspended.
We measure the power draw of both the x86-tier and the StrongARM-tier in suspended mode over a 10 hour period of time. The energy in the battery is sampled immediately before and after the period of suspension in order to determine the total energy consumed. We divide this value by the total experiment time to obtain the power draw of each device in suspended mode. For the StrongARM-tier, we obtain the full battery capacity from the manufacturer's specification. For the x86-tier we use the estimated capacity specified by the device's battery. We have also confirmed the suspension power draw of the x86-tier using a power meter.
To determine the power draw of the x86-tier and StrongARM-tier in
active mode we run each application on each system configuration for a
24-hour period. During all experiments, we turn off both the screen
and backlight of the two higher tiers in order to make a more fair
comparison. For each device, we measure the amount of time it is
active, ![]() , the amount of time it is suspended,
, the amount of time it is suspended, ![]() , and the
total energy,
, and the
total energy, ![]() , consumed by the tier. Using the total amount of
time suspended and the suspended power draw,
, consumed by the tier. Using the total amount of
time suspended and the suspended power draw, ![]() , we calculate the
energy consumed while suspended,
, we calculate the
energy consumed while suspended, ![]() over the 24 hour period:
over the 24 hour period:
| (4) |
We then use the total energy, ![]() , and the energy used while suspended,
, and the energy used while suspended,
![]() , to compute the energy used while active:
, to compute the energy used while active:
| (5) |
By dividing the energy used while active by the amount of time the
system is active, we obtain the power draw, ![]() , of each tier
in the active state:
, of each tier
in the active state:
| (6) |
The resulting power draws are shown in Tables 2, 3, and 4.
For the ATmega-tier, we assume it will be always on and establish a generous upper bound on the power draw from the Crossbow datasheets. Even using this upper bound, the power draw of the ATmega-tier has very little impact on the lifetime of the system.
Using these individual measurements, we calculate the power draw of the full system as the sum of the power draw of each tier in the appropriate state. Using this value, we calculate the amount of time it takes the entire system to drain the entire battery of the x86-tier.
The goal of our first set of experiments is to vary the level of consistency required and observe the consequent lifetimes of several system configurations. To accomplish this, we vary the interval at which the system wakes to perform synchronization from 0 (always on) to 0.5 hours. A wake interval of i minutes ensures that data is inconsistent for no longer than i minutes.
|
|
|
For each of these experiments, a wireless network is always present, the remote service is available, and new data updates are ready. For the time synchronization application, we assume that the time is synchronized whenever the system wakes. For the web caching application, the system maintains a 5 MB cache consisting of 15 web sites. For the IMAP synchronization application, the Turducken system fetches data updates and sends any queued, local updates upon waking. For this experiment, the x86-tier wakes for 2 minutes of every hour to simulate a user creating modifications to the local mail store. This store initially contains 4MB of mail in four separate folders. The queued updates to the local store are sent to the remote IMAP server when the StrongARM-tier wakes to synchronize. In addition, new mail is sent to the inbox at a rate of 120KB per hour. During synchronization, the Turducken client fetches this mail.
| [angle=0,width=]figs/timeWake |
The results of the time synchronization experiment are shown in Figure 3. When the system synchronizes frequently, the lifetime of the x86-only system degrades drastically while both the x86+StrongARM+ATmega and x86+ATmega configurations maintain nearly constant lifetimes. This is a consequence of the fact that when using a Turducken system, the x86 and StrongARM tiers never need to come out of a suspended state. In this case, the x86+ATmega configuration has a lifetime of about 225 hours and the x86+StrongARM+ATmega has a lifetime of approximately 180 hours. The difference between these two configurations is a result of the energy draw of the StrongARM-tier in suspended mode.
| [angle=0,width=]figs/WebWake |
Figure 4 shows the results of the web caching experiment. We observe that the x86+StrongARM+ATmega consistently performs better than the other configurations, providing a ten times improvement for always on operation and a three times improvement for less-stringent levels of consistency. Additionally, we observe that as the wake interval grows, the lifetime gain lessens. This is a result of the energy required to power the StrongARM-tier in suspended mode. Similarly, the x86+ATmega system performs worse than the x86-only configuration for larger wake intervals because of the additional energy required to power the ATmega tier. Again, we can conclude from these observations that the higher the level of consistency required, the better the performance of Turducken.
| [angle=0,width=]figs/mailWake |
Figure 5 shows the results of the IMAP synchronization
experiment. The relative performance for IMAP synchronization is very
similar to the web caching application, however, we observe that the
absolute system lifetimes are significantly smaller. This is a result
of the workload of IMAP synchronization. This particular experiment
requires that the x86-tier wake periodically to simulate a user
updating the local mail store, which costs additional energy. This
application also introduces additional outgoing network traffic which
impacts energy usage. However, we still observe that Turducken enjoys
at least a 150% improvement in system lifetime for wakeup intervals less than
six minutes. If the x86-tier does not perform periodic synchronization and
only wakes up once an hour to send and receive updates its average
lifetime is found to be 75 hours. However, the cost of this gain in
system lifetime is that the expected time to get an update is
![]() hours, where
hours, where ![]() is the probability of a network
connection being available. Since this latency can be large for small
values of
is the probability of a network
connection being available. Since this latency can be large for small
values of ![]() , it is reasonable to sacrifice 13% of the system's
lifetime in exchange for one-tenth the expected latency.
, it is reasonable to sacrifice 13% of the system's
lifetime in exchange for one-tenth the expected latency.
[angle=0,width=]figs/barGraphPower
|
Figure 6 shows the average power draw for each tier. Each bar represents the total average power consumed by a particular configuration running a particular application. A bar is composed of several components that show each tier's contribution to the average power draw of the entire system. We further decompose each tier's contribution into its active and suspended modes. For example, for the x86-only configuration running the time application, the graph shows that the x86-tier spends most of its time suspended and a small amount of time in its active mode. Similarly, when it is augmented with an ATmega-tier, it spends all of its time suspended and the ATmega-tier expends a negligible amount of power. In the web caching experiment, the x86+StrongARM+ATmega configuration is able to replace the active power of the x86-tier with the StrongARM-tier. The mail experiment sees a similar gain; however, because the x86-tier spends more time in active mode, the resulting active power draw is larger. We observe that Turducken systems achieve lower average power consumption by replacing active power consumption in less efficient tiers with more efficient ones.
The goal of our second set of experiments is to vary the availability of a wireless network and the availability of the required service, and observe the consequent lifetimes of several system configurations. For this set of experiments, we look exclusively at the web caching application and fix the wake interval at 12 minutes. In the first experiment, we vary the probability that a wireless network is available from 0 (network never available) to 1 (network always available). In the second experiment, we fix the probability of wireless network availability at 1 and vary the probability that a set of web servers is reachable from 0 (web servers never reachable) to 1 (web servers always reachable). For this experiment, we assume that either all web servers are reachable or no web servers are reachable and we assume that it takes a trivial amount of time to determine reachability for all servers.
| [angle=0,width=]figs/WebProbWifi |
The results of varying the network availability are shown in Figure 7. When the probability of WiFi is low, the x86+ATmega system performs best. This is because it can avoid waking the x86-tier if no signal is present. The x86+StrongARM+ATmega system enjoys the same benefit, but incurs the cost of powering the StrongARM-tier in suspended mode. Interestingly, the x86-only configuration performs similar to the x86+StrongARM+ATmega for low probabilities. This implies that the cost to periodically wake the x86 to discover that no network is present is roughly equivalent to the cost of powering the StrongARM and ATmega tiers in suspended mode. As the probability of a network connection increases, the x86+StrongARM+ATmega system remains nearly constant, outperforming the other configurations by up to a factor of 2. This is a result of the energy saved fetching web pages using the StrongARM-tier without waking the x86-tier. We can conclude that Turducken provides a greater benefit as network coverage increases, and performs no worse than an x86 alone as coverage decreases.
| [angle=0,width=]figs/WebProbSer |
The results of varying the availability of web servers is shown in Figure 8. The results for this experiment are similar to the previous experiment with the exception of the x86+ATmega configuration. While the ATmega-tier can determine the presence of WiFi, it cannot determine the reachability of a web server. Therefore, the ATmega-tier must always wake the x86-tier to determine if the web servers are reachable. This costs the x86+ATmega configuration up to 40 hours of lifetime. However, as the probability of service increases, the benefit of Turducken increases.
Our primary observation is simple: for many common distributed applications, a Turducken system can maintain a high level of consistency at a fraction of the power cost of a conventional laptop. This allows system behavior which has traditionally been ruled out in favor of conserving battery power. Naturally, there is a cost incurred when powering additional devices. This cost becomes noticeable when the system wakes up less frequently, reducing the benefit and retaining the cost of the additional hardware. Fortunately, even if the system never wakes up, the x86+StrongARM+ATmega configuration will last 82% as long as the x86-only system.
Our experiments have also shown that the main limiting factor of the system's battery lifetime is the suspended power draw of the x86-tier. Our proposed solution to this is to use hibernation, which involves saving the machine's state to disk and powering it down. When the system is restored, it boots to the previously saved state. Clearly, it will cost more in both energy and latency to wake a device out of hibernation; however, during times of little or no activity (e.g. at night), using hibernation could result in significant power savings, potentially extending the system's lifetime to over a month on a single charge.
Additionally, it is clear that the benefit achieved is highly application dependent. For example, in the case of very simple applications, like time synchronization, the x86+ATmega configuration achieves the best performance. The best set of tiers for a particular Turducken system depends on the target applications that the system will host.
A number of related research projects have explored strategies for reducing energy consumption of mobile devices. The Wake-on-Wireless project (WoW) [24] proposes augmenting a PDA with a wireless sensor. An in-network server notifies the sensor when it should wake the PDA such that it can serve incoming requests. The goal of WoW is similar to the goal of Turducken; low-power operating modes in mobile devices. However, this paper has shown the value in augmenting laptops with multiple tiers that can execute synchronization jobs: tiers may perform many operations without waking up the next tier. Also, Turducken is a completely standalone system, not requiring any support from the wireless network. Some work has also looked at integrating multiple radios into a mobile platform [22,20], and we use this idea in Hierarchical Power Management; however, we are focused on integrating entire independent subsystems rather than individual hardware components. Mayo and Ranganathan proposed energy scale-down as a technique for saving power in mobile devices [17]. They make a similar observation that different mobile devices are optimized for different power points. They specifically suggest using wireless LAN energy management and multiple processor cores, as well as possibly using multiple displays in a mobile device.
Several projects have looked at managing energy from a whole-system standpoint. The Odyssey System [6] trades off resources, such as energy, for application fidelity. The ECOsystem [32] manages energy as any other operating system resource, enforcing fairness between applications, as well as setting global energy constraints. Simunic, et al. [25] propose a general method to manage energy consumption in across several system components. These systems are primarily designed for making short-term decisions and do not directly address non-reducible power in mobile devices.
An alternative to reducing the energy consumed while utilizing remote services is to ensure that the services are available locally, on the user's personal devices. A number of research projects have focused on ensuring availability of a user's personal data. The Personal Server [29] is a compact storage device which can provide reliable access to a user's personal data. Because the device does not have any kind of display, it operates at a low power point. However, unlike Turducken, the Personal Server provides a specific set of services and does not provide the same level of composability or flexibility in managing energy usage. Another approach is to ensure personal data availability by monitoring devices in a Personal Area Network (PAN), and migrating data from a device when its energy supply becomes critically low [23]. Again, this does not ensure that a device can use services provided outside of the PAN. Additionally, the focus of Turducken is to increase availability for a single, integrated system. However, we expect that the techniques developed for Turducken could also be useful managing energy and availability in a disconnected mobile distributed system.
The authors wish to thank Allison Clayton, Brian Levine, and Prashant Shenoy who provided helpful feedback on earlier drafts. This work is supported in part by the National Science Foundation under grants CNS-0447877, DUE-0416863, and EIA-0080119. The U.S. Government is authorized to reproduce and distribute reprints for Governmental purposes notwithstanding any copyright annotation thereon. The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of the the National Science Foundation or the U.S. Government.
この文書はLaTeX2HTML 翻訳プログラム Version 2002-2-1 (1.70)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds,
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
を日本語化したもの( 2002-2-1 (1.70) JA patch-2.0 版)
Copyright © 1998, 1999,
Kenshi Muto,
Debian Project.
Copyright © 2001, 2002,
Shige TAKENO,
Niigata Inst.Tech.
を用いて生成されました。
コマンド行は以下の通りでした。:
latex2html -split 0 -show_section_numbers -local_icons mobisys_2005.tex.
翻訳は Jacob M. Sorber によって 平成17年4月22日 に実行されました。