|
EESR '05 Paper
[EESR '05 Technical Program]
M-ECho: A Middleware for Morphable Data-Streaming in Pervasive
Systems
Himanshu Raj
Karsten Schwan
Ripal Nathuji
Center for Experimental Research in Computer Systems
Georgia Institute of Technology, Atlanta, GA 30332
{rhim, schwan}@cc.gatech.edu, rnathuji@ece.gatech.edu
The end-to-end performance of pervasive mobile systems
is commonly dictated by the availability of resources at the weakest link.
However, a number of run-time adaptations or morphing steps can be performed
to tune the system performance. In this paper, we present
M-ECho, a middleware for system morphing.
M-ECho is designed with focus on data
streaming applications, specifically in the field of pervasive mobile
systems. We consider an autonomous robotics application comprising of a set
of cooperating mobile robots to demonstrate and
evaluate M-ECho's system morphing capabilities. Optimizations are based
upon metrics of average instantaneous power consumption
at a single node (local) as well as the power consumed by all participants (global).
Experimental results show that M-ECho is able to achieve improved end-to-end performance
with its dynamic code morphing techniques.
Pervasive mobile systems are often comprised of resource limited
mobile nodes. These nodes can be characterized by decreased
computing and communication capabilities, as well as limited battery power.
Due to continuous
environmental changes and changing system
objectives, it is required that these systems adapt
themselves in order to optimize their resource usage and performance.
In this paper, we present M-ECho, a middleware that provides support for
continuous system adaptation and evolution, termed system morphing.
In particular, M-ECho focuses on data streaming applications in pervasive
domain.
Specifically, the middleware
(1) provides mechanisms for runtime behavioral changes and (re)deployment
of program components and (2) makes middleware, and thereby
applications, aware of
current resources. Resource awareness involves runtime interactions
between middleware and the underlying distributed platform. Code morphing is
the runtime alteration of the implementations of specific program components, the
goal being to dynamically create components with the properties that best
match the system's resource usage directives. Code
morphing is carried out by actions that include runtime code generation, code
deployment or re-deployment, and by
change transactions [8] that guarantee desired
safety properties when distributed programs are changed at runtime. Morphing is
triggered by changes in program objectives or behavior and/or in currently
available resources.
Apart from traditional end-to-end performance criterion, such as
increasing achievable bandwidth and reducing latency,
efficient energy usage is an important objective for pervasive mobile
systems
since it directly relates to the longevity of the system. In this work,
we focus on this criteria for evaluating the morphing capabilities of
M-ECho for target systems.
Past research on energy efficiency in mobile systems has typically sought
to prolong the battery lives of individual devices. Recent results
extend to entire systems. An example is message routing in ad-hoc
networks, where cooperative routing is performed
to route messages to avoid using power-poor devices, thereby permitting
the entire system to continue its operation [4].
Our work addresses the system-wide power consumed by the processing and
communication actions of a distributed application. We focus on power
and not on energy since (1) we assume that our tasks are long running
and (2) available energy (battery power) is not a monotonically
decreasing resource in the system. There might be opportunities for
charging batteries in future or change in the total number of nodes comprising the
system. The premise is that the application can function
only as long as the weakest (the power poorest) device hosting its components.
There is a variety of techniques to deal with predictable device
failures due to power paucity, including migrating functionality
partially or completely onto different devices. Instead of requiring an
application to explicitly implement such techniques, our research is creating
middleware solutions that make it easier for developers to implement such
techniques or even to automate their use.
The key advantage of code morphing over per device or per subsystem
techniques for managing power is the ability to integrate
application-level changes with system-level behavior changes.
To evaluate and quantify this advantage, we have
implemented code morphing in the M-ECho middleware. M-ECho implements
a publish/subscribe paradigm of inter-machine
communication, mapping the logical channels to link cooperating
devices for inter-device communication. The data traversing
these channels is described as events, where event providers, consumers, or
intermediates can operate on events using well-defined event handlers.
Event handlers are the software components for which we implement code morphing.
Such handler morphing differs from prior work in application adaptation due to its
ability to
re-deploy handlers on demand and as currently needed by
the application or its execution environment. The redeployment uses
either dynamic compilation and code
generation or static code repository. In a sense, handler morphing combines the abilities of
compilers to generate the code most suitable for a platform (and its current
resources) with parameterization or system-based techniques for dynamic
program adaptation.
While M-ECho's implementation of code morphing targets event handlers,
the idea of code morphing generalizes to other systems. Class and agent
based migration has been used in Java and Corba
frameworks [9,7].
Tempo [14] uses code parameterization and compiler assisted code
specialization for runtime optimization.
This paper makes two key contributions.
- It describes the code morphing mechanisms provided by M-ECho,
where event handlers are dynamically modified in order to achieve desired changes
in application behavior in response to system-wide changes in energy resources.
- Experimentation with a realistic, distributed application in the
autonomous robotics
domain both motivates this work and provides insights into the
utility and limitations of middleware-level techniques like code morphing to
improve performance. In this application, a team of autonomous robots must
communicate environment information like images or laser data to each other,
in order to attain some joint goal, such as foraging for resources.
Attaining such a goal requires cooperation and joint actions, including
tasks like motion and path planning.
An interesting insight derived from the use of M-ECho with the robotics
application is a differentiation of node local from system global instantaneous power consumption as target performance metric.
This is particularly relevant in mobile applications in which there are future
opportunities for re-charging batteries (e.g., consider robots docking at
a re-charging station). An interesting example in the robotics application
is the use of compression techniques for image sensor data. JPEG compression, for
instance, can reduce the instantaneous power consumption of the overall system
by approximately , even when we keep the full quality. If we
reduce the quality to 75%, the overall system power consumption reduces
to .
However, if the data provider (i.e., server) has the
opportunity to re-charge its batteries in the near future, whereas the client does
not, then it may be better to use simpler data reduction techniques, such as an
8 bpp (bits per pixel) grayscale conversion of a 24 bpp color image.
This reduces client's power consumption up to , at the cost
of increasing server's power consumption by . This tradeoff
is entirely reasonable when server vs. client initial energy levels differ
(and both should run out of power at approximately the same time) and/or when
the server has future opportunities to re-charge whereas the client does not.
2 Issues with Power Consumption in Autonomous Robotics
Energy conservation has always been a goal for mobile devices due to their
limited battery power. In distributed mobile systems, a range of techniques is
used to conserve system-wide energy and ensure application longevity, ranging
from node-level methods like dynamic voltage
scaling [17], periodic sleeping or frequency scaling to reduce
idle times, to compiler techniques such as generating energy-efficient
code [11],
to OS specific methods like power-aware scheduling [20],
to application-level methods like agent
migration [9] and changing
attributes such as fidelity [6].
Amongst such techniques, online methods for power management typically
address specific subsystems, beginning with early work on power-aware
communication [10], to recent work on power-aware routing in
wireless ad-hoc networks [18].
Such methods can take advantage of the fact that participating nodes tend
to be freely interchangeable, so that one node can transparently replace
another. In comparison, in the robotics applications addressed by our work,
nodes have certain roles, which must be taken into account explicitly when
applications are adapted.
Our target application domain is distributed autonomous robotics. Our specific
application is one in which a team of robots cooperated to execute some common
task, an example being disaster recovery and relief. Each rescue robot can
perform multiple actions (i.e., play different roles), constrained by the
availability of certain peripherals. An example is a robot equipped with a
laser
but not with odometry capabilities, which means that the robot can perform
environment sensing but not localization (i.e., help the team determine its
robots' respective positions). Other constraints are due to current application
or environment state. A robot with a good view of a disaster site, for
instance, may have to maintain its critically important role as a sentry, despite
its ability to also perform other tasks. Another interesting characteristic of
this application is that energy need not be a uniformly decreasing resource.
A robot may be able to increase its energy resources due to the availability
of an external source of energy. The robot may be able to move towards an external
power source and charge its batteries without causing a disruption
of service in the system. Or, a robot may have solar batteries, which can
be re-charged when the robot enters a sunny environment.
The specific prototype application being constructed by collaborating robotics researchers
[1]
will consist of up to 100 mobile robots equipped with diverse
sensors such as laser, sonar and cameras, 802.11b-based wireless
communication device(s) and Intel XScale based CPUs. This paper focuses on the
robot team's IT infrastructure,
in anticipation of future micro-robots and current micro-sensor-based systems
where power consumption is dominated by the IT infrastructure's actions and
behavior.
The experiments conducted
in this paper implement a sample collaborative task, using video streams to
emulate sensor communications across different robots and power behavior
of a localization algorithm.
The following list concisely articulates the energy-related goals of
code morphing pursued for our mobile application. The objective is
to extend the application's longevity.
- Maintain suitable per device power health by modifying application behavior
subject to current robot roles, device state, and application state. The goal is
to always run application codes where most appropriate for the entire
application, thereby optimizing application-wide metrics of utility/power.
A sample method is to offload (i.e., delegate) tasks to the most appropriate
robots, based on their current power health, capabilities, and application state.
- Reducing application communication overheads, the method being to dynamically
eliminate unnecessary data from event communications, thereby reducing
power usage. This implies placing appropriate code (i.e., M-ECho
event handlers and filters) onto data-providers (e.g., robots with
sensors).
- Create application-level overlays to help with task offloading, where
codes ordinarily running on single nodes are morphed to processing
pipelines mapped across multiple, network-connected machines.
In comparison to prior work on network-level message routing, our work creates
middleware overlays that route and process events, matching robots' power levels
and processing capabilities. This is akin to assigning roles to sensor
nodes in a wireless sensor network [16].
3 System Morphing with M-ECho
3.1 M-ECho Software Architecture
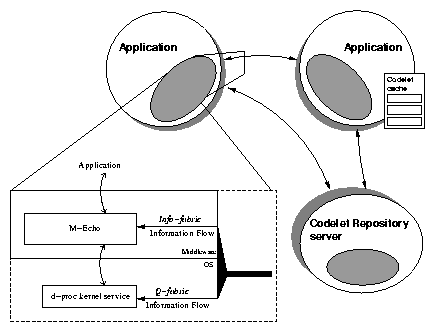
Figure 1:
M-ECho Architecture
|
The M-ECho framework (refer to figure 1) consists of the following components:
- InfoFabric Middleware Platform. The InfoFabric middleware platform
is based on the ECho [5] publish/subscribe middleware which
presents a distributed source/sink view for the whole system.
Information is exchanged between source and sink nodes in form of
events. Event handlers are deployed at the sink node to respond to
specific events, while filters are deployed at either source or sink
nodes to perform information filtering. These event handlers and filters
are application specific. The middleware platform also
interacts with kernel-level d-proc monitoring service which is part of
Q-Fabric [15] infrastructure to receive information
about system level events such as the remaining battery power at a node.
Infofabric enables data aggregation at nodes, much in the same way
provided by DFuse [12] and TAG [13]. The
key difference is that the unit of aggregation are ECho events vs. raw
sensor data.
Since M-ECho utilizes the publish/subscribe paradigm of
communication, a straightforward representation of morphable components are the
handlers and filters applied to the data events that traverse M-ECho-based
applications. In fact, M-ECho's implementation of filters and handlers
(also termed as code segments or codelets hereafter) simplifies morphing by
limiting the generality of code and state compared to that of arbitrary
program components. The codelets are either compiled dynamically using
dynamic code generation or a suitable binary version is obtained from
the codelet repository service, described below.
- Codelet Repository Service (CRS). The CRS functions as a repository for
codelets. Codelets are stored
along with multiple attributes. Examples of these attributes include the format
such as binary vs. ECL source (ECL is a subset of C
language [5], OS/platform and a cryptographic signature hash.
The service provides a traditional FTP like
get/put interface for obtaining/publishing codelets. By storing some
pre-compiled versions of a codelet on the repository, we can save on the cost of
dynamic code generation wherever possible.
Our morphing work takes an overall system approach to dynamic adaptation.
In other words, based upon system requirements (these requirements may be local
or global), we adapt the application components (including middleware) and the environment
components (such as OS and network). In the presented work, we focus on
morphing in M-ECho via adaptation of application components.
Following are the specific morphing techniques that M-ECho
currently implements:
- Code parameterization. We modify particular parameters to affect the
outcome of a certain codelet such as
changing the number of items that a aggregating function might be using,
changing the quality parameter that dictates the computation being
performed by a codelet and changing the rate of events to be
generated.
- Code substitution. We replace one codelet by another. This is assisted via dynamic code generation
for the specific platform or via CRS, as described above.
- Code migration. We use dynamic (re)partitioning and (re)deployment of application components
based on environmental attributes provided by the Q-Fabric
infrastructure such as available network bandwidth and remaining node power.
We collectively refer to the morphing techniques used by M-ECho as code
morphing. The current version of M-ECho supports all the code morphing
techniques described above. As we show later, with code morphing alone we are able to
achieve goals 1 and 2 as stated in section 2.
Our experimental scenarios are based upon a set of robots exchanging
sensor information in order to perform localization and path planning.
Power measurements focus on typical robotic computing subsystems.
In particular, we use PXA255 XScale CPU based evaluation boards
and StrongARM CPU based iPAQs
to mimic the computing system of a robot. Power measurements are
obtained by monitoring current with a measurement circuit based upon a
current sensor IC, and simultaneously measuring voltage.
These values are measured with the Picoscope 212/50 PC-oscilloscope [2].
In the applied mode, the oscilloscope returns an average of a
set of samples obtained at 50 million samples per second every 1ms to
measure single shot signals. We report the average of these power values
as average instantaneous power.
We enhanced the commonly used
Player/Stage robotics framework [3] to use M-ECho middleware.
The current implementation of Player/Stage uses parameterization to perform
limited morphing, adapting event rate(s) and event type. Using M-ECho,
we are able to enhance the capabilities of the framework
(1) to perform codelet substitution and (2) to perform codelet (task) migration across robots,
all of which directly affect power usage.
The goal is to improve energy usage for all devices
participating in the application, that is, to
extend the ability of all devices to continue to pursue their joint
application-level tasks. In this context, we look at two
energy-intensive tasks of this application, the acquisition and exchange of
sensor data and the task of localization.
In our experimentation, former is implemented as the exchange and processing
of video images captured by device-mounted cameras.
Code morphing techniques such as code parameterization and code
substitution are used to utilize diverse data encoding and compression
techniques in order to control energy usage at information providers
vs. consumers.
For the latter task, we use a localization application which is part of
the enhanced player/stage framework. The application uses the adaptive
monte-carlo algorithm [19] and continuously tries
to localize the robot based on the sensor data. We use a log of laser
readings obtained from one random walk of the robot in a synthetic
environment. The localization application reads sensor data from this
log and computes the localization information. We use code migration to show
that it is possible to achieve power savings along with better QoS when
localization is run locally on the robot vs. off-board.
To simulate sensor date exchange between robots, we use a media
application running on iPAQs,
in which a source sends
out raw 24-bit color 352X240 PPM camera images over a 802.11b wireless network
and a client (or sink) displays them. The application utilizes several data
reduction methods for system morphing. These methods include JPEG
compression and image transcoding such as grayscale (GRAY) and
black&white (BW) conversion and image cropping (CROP).
System morphing techniques used are code parameterization,
such as changing the JPEG compression level, and code substitution, such
as changing data reduction methods (which requires changing the
filters and handlers at source and sink respectively).
Table 1 shows the average instantaneous power consumed (in watts) by
the a source and a sink node. Idle shows the base case power
consumption for both nodes when they are idle. When the application is
running, source sends data as fast
as it can, assuming that it always has information to communicate. The
table lists power values for different data reduction methods.
Numeric value adjacent to JPEG
denotes the quality parameter value used by the JPEG compression.
The frame rate observed by the sink and the normalized power consumption for
the desired rate of 1 frame per second (refer
to the discussion below) are also shown.
Table 1:
Source and sink power consumption for parameterization and
substitution code morphing techniques
| Method |
Inst. Power (W) |
Frame Rate |
Normalized power (W) |
| |
Sink |
Source |
(Sink) |
Sink |
Source |
| Idle |
1.66 |
1.49 |
0 |
1.66 |
1.49 |
| Nocomp |
2.16 |
1.96 |
1.9200 |
1.92 |
1.73 |
| JPEG 100 |
2.3 |
2.12 |
3.9000 |
1.82 |
1.65 |
| JPEG 5 |
2.32 |
1.91 |
6.6250 |
1.76 |
1.55 |
| JPEG 75 |
2.33 |
1.97 |
6.1000 |
1.77 |
1.57 |
| BW |
1.59 |
2.01 |
0.3797 |
1.59 |
2.01 |
| GRAY |
1.63 |
1.94 |
0.3750 |
1.63 |
1.94 |
| CROP |
2.14 |
2.05 |
14.1375 |
1.69 |
1.53 |
|
We compare the different methods as following. Given a method can
achieve more QoS (in our case, frame rate) than desired, we compute the
normalized power as following:
Norm power(i) = F/T * 1/ri * (Pi - I) + I
where ri is the QoS (achieved frame rate) and Pi is the average instantaneous power for
method i, I is the idle power and F/T is the desired frame rate. To
obtain system
power, we add respective power values for source and sink nodes. If the frame rate achievable
is less than desired, the normalized power at a node is (as is the
case for BW and GRAY). However this implies a
lower utility for the application (we assume that utility is a smooth
monotonically decreasing function and not a unit step function).
These experiments demonstrate that the choice of morphing technique and
corresponding method depends on the
objective.
For a desired QoS of 1 frame per second for our application, if the
objective is to optimize client average power usage (regardless of the
utility), morphing system can use code substitution to employ
encoding methods such as BW or GRAY. If the objective is to optimize
global average power usage, then code substitution can be used to employ JPEG
compression. Furthermore, if we can tolerate
some image quality loss, code parameterization can be employed to use 75% quality
for optimal overall average system power usage.
A common approach to reducing local power consumption at a node is to
take advantage of CPU frequency/voltage scaling [17]. However, a
reduced frequency often results in an impact to QoS. For example,
for a localization application running on the evaluation board, table 2
shows that the
local average instantaneous power consumption (Local P (W)) decreases with lower frequency
(the processor automatically scales to the lowest voltage to support the
desired frequency). However, the time (T) required to compute localization
increases, thereby nullifying any gains obtained from frequency scaling.
For our application, this effect is magnified due to the architectural
characteristics of the PXA255 CPU. The localization algorithm requires floating
point operations which are not supported in hardware. For all FP
operations, the hardware traps to the OS and
software libraries are used to perform the actual operations. This
overhead can dominate performance for floating point intensive applications.
Assuming that the environment consists of some power and performance rich nodes that have
the ability to periodically recharge themselves (i.e. their power
consumption is not of concern in the performance of the system) and
can process data faster than the local node, we
demonstrate that the localization application can directly benefit from
code migration. Table 2 shows the local node's
average instantaneous power
consumption when the localization algorithm is run remotely (Remote
P (W)). In this
case, local node not only uses less power with lower frequency, it
can still finish the desired task in almost the same time as with higher
frequencies. This also serves as an example of system morphing due to
restricted node capabilities.
Table 2:
Average instantaneous power usage and run time for a localization
application on a node where localization algorithm is run locally vs. on a remote
node
| CPU |
Local |
Remote |
| Freq (MHz) |
P (W) |
T (s) |
P (W) |
T (s) |
| 400 |
4.24 |
39 |
3.37 |
38 |
| 300 |
3.75 |
59 |
3.2 |
38 |
| 200 |
3.62 |
78 |
3.16 |
38 |
|
In this paper, we present the design of M-ECho and its code
morphing capabilities. Using M-ECho for an autonomous robotics
application in a pervasive mobile domain, we demonstrate power
performance benefits of code morphing techniques.
Our future efforts are focused on:
- Using compiler assisted techniques for the dynamic
compilation of codelets for achieving power benefits,
such as mixed code generation [11].
- Quantifying the energy cost of dynamic
compilation of codelets vs. the use of CRS.
- Building morphable application level overlays based on node's capabilities
to achieve goal 3 as stated in section 2.
We are thankful to Keith J. O'Hara and other
robotics collaborators at the Borg Lab [1]. This
research was supported in part by a NSF ITR award.
- 1
-
The borg lab.
https://www.cc.gatech.edu/borg.
- 2
-
Picoscope.
https://www.picoscope.com/.
- 3
-
The Player/Stage Project.
https://playerstage.sourceforge.net/.
- 4
-
CHOKHAWALA, J., AND CHENG, A. M. K.
Optimizing Power Aware Routing in Mobile Ad Hoc Networks.
In Proceedings of WIP Session, Real-Time and Embedded
Technology and Applications Symposium (Toronto, Canada, 2004).
- 5
-
EISENHAUER, G., BUSTAMANTE, F., AND SCHWAN, K.
Event services for high performance computing.
In Proceedings of High Performance Distributed Computing
(2000).
- 6
-
FLINN, J., AND SATYANARAYANAN, M.
Managing Battery Lifetime with Energy-Aware Adaptation.
ACM Transactions on Computer Systems (May 2004).
- 7
-
GU, X., NAHRSTEDT, K., MESSER, A., GREENBERG, I., AND MILOJICIC, D.
Adaptive Offloading Inference for Delivering Applications in
Pervasive Computing Environment.
In Proc. of IEEE International Conference on Pervasive
Computing and Communications (2003).
- 8
-
ISERT, C., AND SCHWAN, K.
ACDS: Adapting Computational Data Streams for High Performance.
In Proceedings of International Parallel and Distributed
Processing Symposium (2000).
- 9
-
KON, F., YAMANE, T., HESS, C., CAMPBELL, R., AND MICKUNAS, M. D.
Dynamic Resource Management and Automatic Configuration of
Distributed Component Services.
In Proceedings of the 6th USENIX Conference on Object-Oriented
Technologies and Systems (2001).
- 10
-
KRAVETS, R., AND KRISHNAN, P.
Power Management Techniques for Mobile Communication.
In Proceedings of MOBICOM (1998).
- 11
-
KRISHNASWAMY, A., AND GUPTA, R.
Profile Guided Selection of ARM and Thumb Instructions.
In Proceedings of ACM SIGPLAN Joint Conference on Languages
Compilers and Tools for Embedded Systems (2003).
- 12
-
KUMAR, R., WOLENETZ, M., AGARWALLAA, B., SHIN, J., HUTTO, P., AND
RAMACHANDRAN, U.
DFuse: A Framework for Distributed Data Fusion.
In Proceedings of SenSys (2003).
- 13
-
MADDEN, S., FRANKLIN, M. J., HELLERSTEIN, J. M., AND HONG, W.
TAG: A Tiny Aggregation Service for ad hoc Sensor Networks.
In Proceedings of OSDI (2002).
- 14
-
NOEL, F., HORNOF, L., CONSEL, C., AND LAWALL, J. L.
Automatic, Template-Based Run-Time Specialization: Implementation
and Experimental Study.
In Proceedings of the International Conference on Computer
Languages (1998), IEEE Computer Society, p. 132.
- 15
-
POELLABAUER, C.
Q-Fabric: System Support for Continuous Online Quality
Management.
PhD thesis, College of Computing, Georgia Institute of Technology,
2004.
- 16
-
ROMER, K., FRANK, C., MARRON, P. M., AND BECKER, C.
Generic Role Assignment for Wireless Sensor Networks.
In Proceedings of SIGOPS European Workshop (2004).
- 17
-
SIMUNIC, T., BENINI, L., ACQUAVIVA, A., GLYNN, P. W., AND MICHELI, G. D.
Dynamic Voltage Scaling and Power Management for Portable Systems.
In Proceedings of Design Automation Conference (2001).
- 18
-
STOJMENOVIC, I., AND LIN, X.
Power Aware Localized Routing in Wireless Networks.
IEEE Transactions on Parallel and Distributed Systems
(November 2001).
- 19
-
THRUN, S., FOX, D., AND BURGARD, W.
Monte Carlo Localization With Mixture Proposal Distribution.
In Proceedings of the National Conference on Artificial
Intelligence (2000).
- 20
-
YUAN, W., AND NAHRSTEDT, K.
Energy-Efficient Soft Real-Time CPU Scheduling for Mobile Multimedia
Systems.
In Proceedings of SOSP (2003).
M-ECho: A Middleware for Morphable Data-Streaming in Pervasive
Systems
This document was generated using the
LaTeX2HTML translator Version 2002-2-1 (1.70)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons morph-eesr05.tex
The translation was initiated by Himanshu Raj on 2005-05-04
Himanshu Raj
2005-05-04
|