USENIX Windows NT Workshop, 1997
[Technical Program]
| Pp. 113–122 of the Proceedings |  |
|
Parallel Processing with
Windows NT Networks
Partha Dasgupta
Department of Computer Science and Engineering
Arizona State University
Tempe AZ 85287-5406
Email: partha@asu.edu
http://cactus.eas.asu.edu/partha
|
Abstract
Workstation-based parallel processing is an area that is still dominated
by Unix-based systems. We have been building new methods for shared-memory
parallel processing systems on top of Windows NT based net-works of machines.
As of present we have been involved in four related systems, called
Calypso NT, Chime, Malaxis
and MILAN. All of these are middleware, that is they are system level libraries
and utility programs that allow programmers to utilize a network efficiently
for high volume computations. Calypso
was first built on Unix [BDK95], and then ported to Windows NT. Chime
and Malaxis are NT systems and MILAN is still under the design phase.
This paper describes the systems, the techniques used to implement
them on Windows NT and the road-blocks from a Unix programmer�s point of
view.
|
1. Introduction
| |
This paper describes the experience of porting to and programming with
Windows NT (from a Unix programmer�s perspective) while implementing four
related parallel processing projects on a network of computers. The paper
also provides overview details about the parallel processing systems we
have built. Our research efforts have produced system-level programs and
libraries that run under Windows NT and allow parallel applications to
utilize a network of workstations and have access to shared memory and
provided fault tolerance. We have been working with Windows NT since January
1996 and have designed, implemented and ported, considerable amount of
software. All the people involved with the projects had prior significant
system development experience with Unix. Thus we started with our own set
of biases and �set-in� ways. Therefore, switching to Windows
NT has been fun at times and frustrating at others.
Two of the four projects under way have been implemented and tested.
These are:
-
Calypso NT: Calypso NT is a modification and port of a preceding
Unix implementation. Calypso on Unix supports shared memory parallel programs
that execute on a network of Sun machines and provides an efficient execution
substrate coupled with low-cost fault tolerance and load balancing. The
porting of Calypso to Calypso NT was our first experience with the Windows
NT operating system. The Calypso NT system is being distributed for
free and is available at the
Calypso Web site (www.eas.asu.edu/~calypso).
-
Chime: Chime is an efficient, fault-tolerant implementation
of the Compositional C++ parallel programming language on Windows NT. Some
of the lessons learned from Calypso have migrated to Chime, but a lot of
the inner architecture is different, due to a change in programming style
from �Unix-ish� to �NT-ish�.
Two newer NT-based projects are in progress. These are:
-
Malaxis: An implementation of a Distributed Shared Memory
(DSM) system for Windows NT. This system uses an innovative distributed
locking mechanism that is coupled with barrier synchronization. This technique
is expected to provide performance better than release consistent DSM systems.
The actual performance has not been tested yet.
-
MILAN: A metacomputing environment that extends the technologies
prototyped in Calypso, Chime, Malaxis, and a Java-based system (Charlotte)
[BKKW96], to provide a unified computing environment for robust general
purpose computing on a networked platform.
Our current Windows NT platform consists of twelve Pentium-Pro-200 computers,
four Pentium-133 computers and five Pentium-90 computers connected by a
100Mb/s Ethernet, running Windows NT 4.0. The development environment consists
of Visual C++ 4.2.
.
|
2. From Unix to Windows NT
| |
Like most academic research groups, we were a heavily Unix (SunOS)
oriented group. Our research was hosted on Sun computers and all the participants
were well versed in Unix and somewhat skeptical of Windows NT. So making
the plunge into NT was venturing into uncharted waters.
As stated earlier, we started by attempting to port the Unix
version of Calypso, to Windows NT. Since many of the mechanisms used
by Calypso are operating system independent, we thought that porting would
be a matter of replacing some Unix system calls with Windows NT system
calls and recompiling. After a few months of attempts, using several GNU
tools and libraries, it turned out that we were wrong.
We then discovered the key differences between Unix and NT. These differences
cannot be shoved under the rug via user-level libraries, and affects the
porting of system-level software. The differences include:
-
Windows NT does not support signals. There are a variety of mechanisms
in NT for asynchronous events including threads, messages, events and so
on, but they do not map on cleanly to signals.
-
Windows NT uses �Structured Exception Handling� (or SEH) which is quite
different from what UNIX programmers are used to.
-
Windows NT does not provide a �remote shell� feature.
-
Threads are the mechanism of choice for handling any form of asynchrony
- including those tasks normally done through signals in Unix.
-
Windows NT expects the applications to be integrated with the windowing
system and preferably such applications should be developed with the MFC
(Microsoft Foundation Classes) library.
-
Terminology is different, making things confusing and sometimes exasperating.
In spite of such differences, the similarities between Unix and NT are
quite striking. Due to the functional similarities, differences are easy
to overlook. Some good articles on porting strategies from Unix to NT exist
in the documentation library that is bundled with the development environment
(a.k.a. MSDN �� Microsoft Developers Network).
|
3. Parallel Processing on Networks
| |
In recent years, the focus of parallel processing technology has shifted
from specialized multiprocessing hardware to distributed computing. The
most important factor in the favor of distributed computing is that it
can provide high performance at low cost. The computational power of a
workstation cluster can surpass that of a supercomputer, if harnessed properly.
The advantages of using a network of workstations to implement a parallel
processing system are evident from the development of a plethora of parallel
processing solutions based on distributed platforms, in recent years.
These �distributed� parallel processing systems enable the programmer
to exploit the hidden computational power of the networked workstations,
but they do not always address many of the important issues. Most of these
systems use their own programming models and/or programming languages that
are not always easy to understand and require extensive modifications to
existing software. Message passing systems, for instance, add a layer that
facilitates data transfer and process synchronization using messages. Some
parallel processing systems do not differentiate between the parallelism
inherent in an application and the parallelism available at execution time.
In such cases, the degree of parallelism is an argument to the program.
However once the execution begins, the width becomes fixed. Therefore,
issues such as failure recovery or appropriate distribution of the workload
to account for slow and fast machines cannot be addressed elegantly.
3.1 Prior Work
Significant numbers of parallel processing systems have been built
for use in networked environment. The notable ones are PVM, MPI and Linda.
The parallel processing systems can be loosely divided into two types,
those that depend on a message passing scheme and those that use some form
of global address spaces. Many systems provide message passing, or Remote
Procedure Call facility built on top of a message passing. These
include PVM [S90, GS92], GLU [JA91], Isis and so on. These
systems provide a runtime library (and sometimes compiler support) to enable
the writing of parallel programs as concurrently executable units.
Using global memory to make programs communicate has been established
as a �natural� interface for parallel programming. Distributed systems
do not support global memory in hardware, and hence, this feature has to
be implemented in software. While systems built around Distributed Shared
Memory (DSM) like IVY [Li88] Munin [DCZ90], TreadMarks [ACD+95] and Quarks
[K96] and Clouds [DLA+90] provide a more natural programming model, they
still suffer from the high cost of distributed synchronization and the
inability to provide suitable fault tolerance. A mature system that uses
a variant of the DSM concept is Linda [CG89]. Piranha [GJK93] provides
a feature similar to Calypso in that is allows dynamic load sharing via
the ability to add and subtract workers on the fly. However, the programming
strategy is different, deleting workers need backing up tuples, and fault
tolerance is not supported.
The issues of providing fault tolerance have generally been addressed
separately from the issues of parallel processing. There have been three
major mechanisms: checkpointing, replication and process groups.
Such approaches have been implemented in CIRCUS [Coo85], LOCUS [PWC+81],
and Clouds [DLA+90], Isis [BJ87], Fail-safe PVM [LFS93], FT-Linda [BS93],
and Plinda [AS91] However, all these systems add significant overhead,
even when there is no failure.
More recently several prominent projects have similar goals to us.
These include the NOW [Pat+95] project, the HPC++ [MMB+94] project, The
Cilk project [BL97] and the Dome [NAB+95] project. All these projects however
use approaches that are somewhat conventional (RPC or message based systems
with provisions for fault detection, checkpointing, and so on.)
While the majority of the systems run on Unix, there are a few systems
that run on Windows NT. These include Win-PVM, Win32-MPI and Brazos [SB97].
|
4. The Calypso System
| |
The design of Calypso [BDK95, DKR95] addresses efficient, reliable
parallel processing in a clean and efficient manner. In particular the
Calypso NT [MSD97] has the following salient features:
-
Ease of Programming: The programmer writes programs in C or C++
and uses a language independent API (application programming interface)
to express parallelism. The API is based on a shared-memory programming
model which is small, elegant, simple and easy to learn.
-
Separation of Logical Parallelism from Physical Parallelism: The
parallelism expressed in an application, written using a high-level programming
language, is logical parallelism. Logical parallelism is be kept separate
from physical parallelism, which depends upon the number of workstations
available at runtime.
-
Fault Tolerance: The execution of parallel Calypso jobs is resilient
to failures. Unlike other fault-tolerant systems, there is no additional
cost associated with this feature in the absence of failures.
-
Dynamic Load Balancing: Calypso automatically distributes the workload
among the available machines such that faster machines do more work compared
to slower machines.
-
High Performance: Our performance results indicate that the features
listed above can be provided with minimal overhead and that a large class
of coarse-grained computations can benefit from our system.
The core functionality of Calypso is provided by a unified set of mechanisms,
called eager scheduling, collating differential memory and Two-phase
Idempotent Execution Strategy (TIES). Eager scheduling provides the
ability to dynamically exploit the computational power of a varying set
of networked machines, that includes machines that are slow, loaded or
have dynamically changing loading properties. The eager scheduling algorithm
works by assigning tasks to free machines in a round robin-fashion until
all the tasks are completed. The same task may be assigned to more than
one machine (if all tasks have been assigned and some have not yet terminated).
Consequently, free or faster machines end up doing more work than the machines
that are slower or loaded heavily. This results in an automatically load
balanced system. Secondly, if a machine fails (which can also be regarded
as an infinitely slow machine), it does not affect the computation at all.
Thirdly, computations do not wait or stall as a result of system�s asynchrony
or failures. Finally, an executing program can utilize any newly available
machines at any time.
As it is obvious the memory updates in such a system need careful consideration,
the remaining mechanisms ensure correct executions in spite of failures,
and other problems related to asynchrony. To ensure that the inherent possibility
of a multiplicity of executions due to eager scheduling results in exactly-once
execution semantically, the TIES method is used. Furthermore, arbitrarily
small update granularities in shared memory and the proper updates of memory
are both supported by the collating differential memory mechanism.
The implementation of Calypso was first done on Unix. The Windows NT
port preserves the Unix methodology and replaces the signal handling and
memory-faulting methods with NT specific handlers as described later
|
5. The Chime System
| |
Chime is an implementation of the shared memory part Compositional
C++ [CK92] language on a network of Windows NT machines. The shared
memory part of CC++ is designed for shared memory multiprocessors. It embodies
many features that have been considered impossible if not difficult to
implement on distributed machines. These include structured memory
sharing (via use of cactus stacks), nested parallelism and inter-thread
synchronization.
Chime implements these features of CC++, efficiently on a distributed
system, making the distributed system look and feel like a real shared
memory multiprocessor. In addition, Chime adds fault tolerance and load
balancing.
A complete description of how Chime works is beyond the scope of this
paper, but we will present some NT specific considerations.
The major difference between the implementation of Calypso and Chime
is in the manner threads are used and contexts are migrated. Every site
running Chime, runs two threads per process. The threads are called the
�Controlling� thread and the �Application� thread. The controlling thread
is responsible for all communication, memory-fault handling, thread context
migration and scheduling. The application thread runs the code written
by the programmer of the application.
As an example, consider the case when a application thread, running
one of the parallel tasks of a parallel application decides to spawn a
subtask, which is a nested parallel computation:
-
The application thread suspends itself and signals an event to the controlling
thread.
-
The controlling thread saves the context of the application thread. This
context will be used to create the parallel tasks on remote machines.
-
The controlling thread registers with a manager, the context of the application
thread, the number of new tasks to be created, the stack of the application
thread and the �continuation�, i.e. the remainder of the application thread,
that should be executed after the parallel tasks are over.
-
The manager then schedules the new threads on available machines.
-
A controlling thread on a worker machine picks up a task from the manager.
-
The controlling thread on the worker now crafts an application thread,
with the same stack and context as the parent thread, and starts the thread.
-
Via some compiler tricks, the newly created thread executes the task it
was supposed to execute.
-
Then, when the thread terminates, the updates it made to the global data
and the stack are returned to the manager and its state is appropriately
updated.
The above is just one aspect of the execution behavior implemented in Chime.
The complete system supports proper scoping of variables, execution management,
inter-thread synchronization and nested parallelism. The system consists
of the Chime runtime library and a pre-processor that serve as a front
end to the C++ compiler.
|
6. Malaxis and Milan
| |
We are also building more systems using Windows NT. The two notable
ones are (i) Malaxis, a DSM (Distributed Shared Memory) system that provides
data locking and barrier synchronization (ii) MILAN, a metacomputing platform.
Due to space constraints, the descriptions of these are omitted.
|
7. Using NT features
| |
In order to implement software such as Calypso, and Chime, we
needed some support from the operating system. The support included:
-
Support for user level demand paging for implementing page-based distributed
shared memory.
-
Support for obtaining and setting thread contexts for implementing task
migration and task scope preservation.
-
Support for resetting the contents and the position of the user stack in
order to implement distributed cactus stacks.
-
Support for network communication.
-
Support for asynchronous notification and exception handling.
It turned out that Windows NT supports all of these features�and in some
ways more elegantly than Unix does. It was just necessary to expend considerable
time and effort to work out the detail of usage and semantics.
Previously, when we were developing libraries for parallel computing
in Unix we used the ubiquitous ASCII interface for all programs. The ASCII
interface is not so ubiquitous under NT, in fact, it is thought of as arcane.
NT programs that use textual interfacing are called �console applications�.
So far, except for some user interfaces, most of out programs are console
applications, though we intend to change this in the near future.
7.1 Memory Handling
Memory handling in Windows NT is different and in many ways superior
to UNIX. NT has various states of memory allocation (reserved, allocated,
committed, guarded and so on). These states allow (among other things)
a set of threads to allocate address space and then later allocate memory
when the need arises.
Windows NT memory management is designed for use with threads and sounds
like overkill to Unix programmers who are not heavy users of threads. We
will discuss the threads issue in a later section. We found the functionality
to be useful for allocating and protecting memory for supporting the dynamic
distributed shared memory used by Calypso. The important memory management
API functions are VirtualAlloc and VirtualProtect.
It is possible to protect any range of pages in memory against read
or write or execute access. Access violation results in an exception, and
the exception handler is provided with a plethora of information about
the nature of the exception, something most Unix-based systems do not provide.
Due to the tight coupling between the memory protection and exception handling,
much of the Calypso memory system had to be reprogrammed, but the end result,
we feel, is more elegant and extensible.
7.2 Exception handling
Exception handling was the major surprise. While UNIX uses signals,
Windows NT uses Structured Exception Handling (SEH). SEH is not the same
as C++ exception handling, which makes use of C++ keywords throw, try
and catch. SEH uses the try-except construct, which
allows programmer to specify a guarded scope to catch a hardware or software
exception using the _try block. The _except block specifies
the exception handler that may be executed based on the value returned
by the exception filter at the time when an exception is raised. The mechanism
is quite different from that of UNIX signals as the lexical structure of
the program rather than one-time installation of the handler specify its
activation. Once, the flow of control is out of the _try block,
any raised exceptions can not be intercepted. While porting Calypso to
NT, this restriction forced us to make some structural changes in the implementation.
In retrospect, there is nothing wrong in the NT approach. However for
Unix programmers who think and breath signals the paradigm shift
can be unnerving (it was for us). Also the lack of signals, at first made
it look like doing things like process migration would be impossible. It
is possible; it necessitates the use of threads.
7.3 Threads
Handling process migration and process context changes had us stumped
for a bit. Without signals, a Unix programmer is lost! However, we soon
discovered the power of threads under Windows NT.
Threads are one of Windows NT�s strongest features. Its thread support
is simple, elegant and works well. A thread is started by calling the CreateThread
routine with a function as argument, the new thread executes the specified
function. The threads are kernel scheduled and share all the global memory.
Quite simple and intuitive. We have found threads to be quite useful, in
many situations, specifically:
-
Threads are very useful for process migration and implementing distributed
stacks (next section).
-
Threads are useful for distributed memory service; i.e. a thread can listen
to incoming invalidations while another thread runs the computation.
-
Threads are also useful in segregating functionality�even when threads
are not really necessary. For example, in Chime, after a page fault, the
faulting thread suspends itself, while a service thread acquires the page,
installs it and restarts the faulting thread.
Windows NT support a variety of thread synchronization and thread control
facilities, including the ability of one thread to stop another thread
and load or store the other thread�s context.
7.4 Process and Stack Migration
Task migration has been used in Calypso to implement pre-emptive scheduling,
a topic outside the scope of this paper. Similar mechanisms have been used
in Chime for setting the correct scope of tasks.
Suppose a process is executing, and we need to freeze it and restart
it on another machine. Under Unix, we would send it a signal and let the
signal handler handle the migration.
Under Windows NT we use two threads for this purpose [MD97]. One thread
listens to incoming messages while the other thread executes. We send a
message to the listening thread. This thread suspends the executing thread
and extracts its context and then ships the context over to another listening
thread on the remote machine. The remote thread sets up the context of
a new thread and starts it.
Similar mechanisms are used in Chime. In CC++ it is necessary for two
parallel computations to share variable declared in the context of the
function that started the parallel computations. This requires a �distributed
cactus stack�. The overview of the implementation steps for this case has
been described in section ??. The actual mechanisms used are events to
block and restart threads, and the API calls GetThreadContext and SetThreadContext.
We are very happy to see that a thread context saved on one machine, can
be restored on another machine and the thread executes correctly.
However, in general thread migration is very tricky in Windows NT due
to the structure of the system. If a thread is in a DLL and its context
is saved, can this context be restored on anther machine? We think not!
Some tests reveal that this sometimes works and sometimes does not. However,
how to find a �safe� place to save the context of an executing thread (without
modifying user-written code) is still an open problem for us.
7.5 Networking
Networking with TCP-IP is almost identical under Unix and Windows NT,
via the use Microsoft Windows Sockets that provide a similar interface
and functionality as that of Berkeley sockets. The Calypso communication
module was compatible with the Microsoft Windows Socket interface with
the only exception being the asynchronous mode of communication. The asynchronous
mode (FASYNC), on UNIX, enables the SIGIO signal to be sent when
I/O is possible. Windows socket implementation has tied the asynchronous
mode with the event-driven windows programming. When a socket is in asynchronous
mode and I/O is possible, instead of raising an exception, a message is
sent to the window specified in the WSAAsyncSelect() function
call. In effect, the mechanism is synchronous, as the thread processing
messages has to read the message synchronously inside an event-loop. Moreover,
a console application can not use sockets in this mode.
7.6 Remote Execution
Creating distributed computations under Unix is simple due to the remote
shell (rsh) feature. A process can easily spawn more processes
on remote machines. Such a feature is not available under Windows NT, making
distributed computations use some form of kludge. The preferred way of
distributing the computation is to use RPC. While the RPC model is fine
for client-server computations, its does not work well for �push� computations
such as parallel processing.
We have used a temporary kludge, where a daemon process is started on
the machine that will host the tasks of the parallel computation. This
daemon listens to commands on a port and starts a process when instructed
to do so. A better solution is to have a Windows NT �service� which starts
up at boot time and then starts processes using the user-id of the remote
user. We have experimented with such a service but have not tested it thoroughly
yet.
7.7 Graphical Interfaces
As stated earlier, we used the console application feature to write
most of our applications. That is, the application works in a �command
window�, which looks like the DOS shell, and in some ways similar to an
xterm. However, all applications under Windows NT are expected
to be integrated with the Windows GUI. For our GUI based interface, we
cheated and used a Unix-like solution. A separate process runs the GUI
and communicates with the controlling process (or manager) via messages,
displaying the status and accepting commands. This works well, but is not
a politically correct approach under Windows NT.
We are working on developing an event-driven framework that interfaces
with MFC and other features in Windows NT to provide a better solution.
We have not yet gained enough experience to make this part work (and we
are systems programmers and not GUI experts).
|
8. Performance
| |
The performance we obtained, both under Calypso and Chime were good,
and comparable to performance obtained under Unix. For the speedup tests
we took a RayTrace program and compiled a sequential version with all compiler
optimization turned on. Then we took a Calypso (parallel) version and compiled
it under the same optimizations. Then we ran the program on Pentium 90MHz
machines and noted the wall clock times. The results are shown in Figure
1.
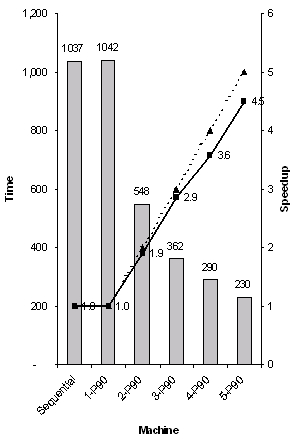 Figure 1: Speedup of Calypso
Figure 1: Speedup of Calypso
The Calypso program took 1042 seconds to execute on one machine as opposed
to 1037 seconds for the sequential program. This shows the low overhead
of our mechanisms. We obtained a speedup of 4.5 on 5 machines in spite
of providing load balancing and fault tolerance, showing these can be incorporated
without additional overhead. This compares very well with Calypso on Unix,
which produced the same speedup.
The Chime system is much more complex, and hence produces slightly lower
performance. Figure 2 shows the result of running a similar (but larger)
RayTrace program under Pentium-Pro 200MHz systems
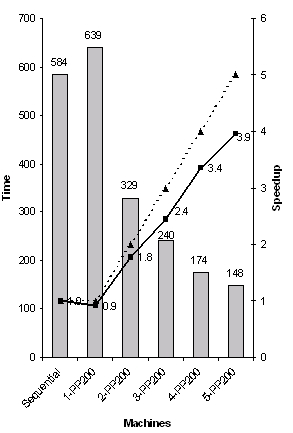 Figure 2: Speedup of Chime
Figure 2: Speedup of Chime
We performed many other tests, including tests for load balancing (mixture
of slow and fast machines) and fault tolerance (transient machines.) Many
of these results can be found in [MSD97, SD97] and on the Web site.
A particular test of Chime is interesting. We ran a trivial program
under Chime that takes a 1024 element array and initializes each element
in parallel. To make the test rigorous, we did thread creation recursively,
that is at the top level two tasks are created, which in turn creates two
tasks each, until 1024 leaf tasks are created. The total number of tasks
created by this program is 3068.
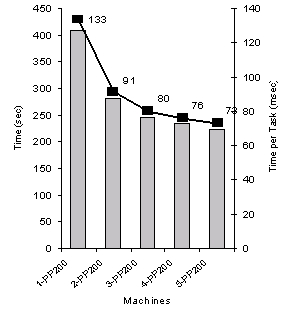 Figure 3: Task
Spawning Overhead Figure 3: Task
Spawning Overhead
The resulting execution times on varying numbers of machines are shown
in Figure 3.
This test shows that the task creation overhead varied from a high of
133 msec and saturates at about a low of 75 msec. The decrease in the time
as machines are added is due to some parallelization of the overhead, while
the asymptotic value is when the central manager saturates.
|
9. Further Down the NT Road
| |
Windows NT has much more to offer than the features we have used. Many
of the features are beneficial to application programmers and not quite
to middleware service providers like us. But many of the more basic features
are quite useful and interesting, although the learning curve is steep.
Some of the features we would like to explore are:
-
Microsoft Foundation Classes
-
File system enhancements
-
Device Drivers
-
Services
The Microsoft Foundation Classes (or MFC) is indeed a powerful, somewhat
intuitive (and somewhat confusing) array of prepackaged classes that make
programming windows easier.
All our applications were console applications. A windows application
has a built in message pump and event handlers. Since the Calypso/Chime
systems are essentially libraries, use of a MFC based application is not
precluded�however there is need for some modifications. Currently the library
provides its own �main� program that set up the memory handling and the
memory protection. This is not permissible under MFC programming.
We are looking into how to ensure MFC compatibility. This is not quite
straightforward as our managers and workers all have to be automatically
generatable from a user program. And the message pumps and the user interfaces
need to be created as default, if the user does not specify them, or allow
the user to build his/her own interface. This project will be investigated
in the future.
Similarly, use of asynchronous I/O, various types of files (mirrored
etc.) has advantages that we may be able to exploit. Loadable device drivers
will allow us to use custom, lightweight, networking protocols, thus reducing
parallel computation overhead.
Some of the features that we did not find a need for include COM, MAPI/TAPI,
OLE and other eclectic and fancy support for high end application development
|
10. In Retrospect
| |
Windows NT has some very strong points. These include:
-
Threads
-
Structured Exception handling
-
Good memory management
-
Excellent program development environment.
-
Huge library of online documentation.
And some shortcomings:
-
No signals
-
No remote execution facility. Main reasons include the manner in which
the Windows GUI is structured and the lack of any ASCII support for applications
(all applications are GUI applications). This leads to the lack of a ptty
interface and hence the lack of network logins. While this shortcoming
is expected to be fixed in the future with network-aware GUI interfaces.
-
Confusing terminology that steepens the learning curve.
Overall, we were happy and impressed. The learning curve was sometimes
steep and mostly curvy. Terminology differences were exasperating. We had
to change a lot of programming strategies to suit the Windows NT way of
doing things. But, in retrospect the changes we made were for the better.
-
Using threads instead of signals for asynchronous event handling is better
programming practice.
-
Structured Event Handling - very weird when we first saw it, is a nice
method of handling exceptions.
The integrated compiler/debugger/makefile system provided by Visual C++
was a wonderful tool to use. The debugging support for multi-threaded programs
is fascinating, and without it, we would not ever had process migration
to work.
In addition to the program development environment, of course NT opens
up the world of PC computing applications. Office productivity tools, web
development tools, personal productivity tools, shareware and freeware
are readily available and of great quality. This was an added bonus.
So the final word is that all of the people working on the project unanimously
state that is was a nice refreshing move from Unix to Windows NT. NT is
a lot nicer system than what we had heard when we fist entered its maze
of twisty little passages
|
11. Acknowledgement
| |
The author wishes to acknowledge the members of the team who
worked hard on making everything work on Windows NT. They include Donald
McClaughlin, Shantanu Sardesai, Rahul Thombre, Alan Skousen, Siva Vaddepuri
and Mahesh Gundelly.
|
12 Sponsor Acknowledgement/Disclaimer
| |
This research is partially sponsored by the following:
-
Defense Advanced Research Projects Agency and Rome Laboratory, Air Force
Materiel Command, USAF, under agreement number F30602-96-1-0320.
-
The National Science Foundation under grant number CCR-9505519.
-
Intel Corporation.
-
Microsoft Corporation (software donations).
The U.S. Government is authorized to reproduce and distribute reprints
for governmental purposes notwithstanding any copyright annotation thereon.
The views and conclusions contained herein are those of the authors
and should not be interpreted as necessarily representing the official
policies or endorsements, either expressed or implied, of the Defense Advanced
Research Projects Agency, Rome Laboratory, or the U.S. Government.
|
13: Availability
| |
The Calypso NT system is available, for free, complete with documentation,
user manual, sample programs, instructions, user interface and remote execution
daemon at http://www.eas.asu.edu/~calypso.
The Chime system will be available at the same site at a later date
|
14. References
|
-
[ACD+95] C. Amza, A.L. Cox, S. Dwarkadas, P. Keleher, H. Lu, R. Rajamony,
W. Yu, and W. Zwaenepoel. TreadMarks: Shared Memory Computing on
Networks of Workstations, IEEE Computer, December 1995.
-
[AS91] Brian Anderson and Dennis Shasha. Persistent Linda: Linda
+ Transactions + Query Processing. Workshop on Research Directions in High-Level
Parallel Programming Languages, Mont Saint-Michel, France June 1991.
-
[BCZ90] J. Bennett, J. Carter, and W. Zwaenepoel. Munin: Distributed
Shared Memory Based on Type-Specific Memory Coherence. In Proc. 2nd Annual
Symp. on Principles and Practice of Parallel Programming, Seattle, WA (USA),
1990. ACM SIGPLAN.
-
[BDK95] A. Baratloo, P. Dasgupta, and Z. M. Kedem. A Novel Software
System for Fault Tolerant Parallel Processing on Distributed Platforms.
In Proceedings of the 4th IEEE International Symposium on High Performance
Distributed Computing, 1995.
-
[BJ87] K. P. Birman, and T. A. Joseph. Reliable Communication in
the Presence of Failures. ACM Transactions of Computer Systems, Vol. 5,
no. 1, pp. 47-76.
-
[BKKW96] A. Baratloo, M. Karaul, Z. Kedem and P. Wyckoff. Charlotte: Metacomputing
on the Web. In Proceedings of the 9th Intl. Conf. on Parallel and Distributed
Computing Systems, 1996.
-
[BL97] R. D. Blumofe, and P. A. Lisiecki Adaptive and Reliable Parallel
Computing on Networks of Workstations, USENIX 1997 Annual Technical Symposium,
1997
-
[BS93] D. Bakken and R. Schlichting. Supporting Fault-Tolerant Parallel
Programming in Linda. Technical Report TR93-18, The University of Arizona,
1993.
-
[CG89] N. Carriero and D.Gelernter. Linda in Context. Comm. of ACM, 32,
1989.
-
[CK92] K. M. Chandy and C. Kesselman, CC++: A Declarative Concurrent, Object
Oriented Programming Notation, Technical Report, CS-92-01, California Institute
of Technology, 1992.
-
[DKR95] P. Dasgupta, Z. M. Kedem, and M. O. Rabin. Parallel Processing
on Networks of Workstations: A Fault-Tolerant, High Performance Approach.
In Proceedings of the 15th IEEE International Conference on Distributed
Computing Systems, 1995.
-
[DLA+90] P. Dasgupta, R. J. LeBlanc Jr., M. Ahamad, and U. Ramachandran.
The Clouds Distributed Operating System. IEEE Computer, 1990.
-
[GBD+94] Al. Geist, Adam Beguelin, Jack Dongarra, Weicheng Jiang, Robert
Mancheck, and Vaidy Sunderam. PVM: Parallel Virtual Machine. The MIT Press,
1994.
-
[GJK93] David Gelernter, Marc Jourdenais, and David Kaminsky. Piranha Scheduling:
Strategies and Their Implementation. Technical Report 983, Yale University
Department of Computer Science, Sept. 1993.
-
[GLS94] W. Gropp, E. Lusk, A. Skjellum. Using MPI Portable Parallel Programming
with the Message Passing Interface. MIT Press, 1994, ISBN 0-262-57104-8.
-
[HPF93] High Performance Fortran Forum. High Performance Fortran Language
Specification Version 1.0, May 1993. Also in Scientific Programming, Vol.
2, No. 1 and 2, Spring and Summer 1993; also Tech Report CRPC-TR92225,
Rice University.
-
[JA91] R. Jagannathan and E. A. Ashcroft. Fault Tolerance in Parallel Implementations
of Functional Languages, In The Twenty First International Symposium on
Fault-Tolerant Computing. 1991.
-
[JF92] R. Jagannathan and A. A. Faustini. GLU: A Hybrid Language for Parallel
Applications Programming. Technical Report SRI-CSL-92-13, SRI International.
1992.
-
[K96] Dilip R. Khandekar. Quarks: Distributed Shared Memory as a Basic
Building Block for Complex Parallel and Distributed Systems. Master's Thesis.
University of Utah. March 1996.
-
[Li88] K. Li. IVY: A Shared Virtual Memory System for Parallel Computing.
In Proceedings of the 1988 International Conference on Parallel Processing,
Volume II, pages 94-101, August 1988.
-
[LFS93] J. Leon, A. Fisher, and P. Steenkiste. Fail-safe PVM: A Portable
Package for Distributed Programming with Transparent Recovery. Technical
Report CMU-CS-93-124, CMU, 1993.
-
[MD97] D. Mclaughlin and P. Dasgupta, Distributed Context Switching: A
Technique to Speed up Parallel Computations. Available via www.eas.asu.edu/~calypso
-
[MMB+94] A. Malony, B. Mohr, P. Beckman, S. Yang, F. Bodin. Performance
Analysis of pC++: A Portable Data-parallel Programming System Scalable
Parallel Computers. In Proceedings of the Eighth International Parallel
Processing Symposium, pp. 75-85, 1994.
-
[MSD97] D. Mclaughlin, S. Sardesai, and P. Dasgupta. Calypso NT: Reliable,
Efficient Parallel Processing on Windows NT Networks, Technical Report,
TR-97-001, Department of Computer Science and Engineering, Arizona State
University, 1997. Also available via www.eas.asu.edu/~calypso
-
[NAB+95] J. Nagib, C. Árabe, A. Beguelin, B. Lowekamp, E. Seligman,
M. Starkey, P. Stephan. Dome: Parallel Programming in a Heterogeneous
Multi-user Environment. Technical Report CMU-CS-95-137, Carnegie Mellon
University Department of Computer Science, 1995.
-
[Pat+94] D. Patterson et.al. A Case for Networks of Workstations:
NOW, IEEE Micro, April 1996.
-
[PWC+81] G. Popek and B. Walker and J. Chow and D. Edwards and C. Kline
and G. Rudisin and G. Thiel, LOCUS: A Network Transparent, High Reliability
Distributed System, Operating Systems Review, 15(5), pp. 169-177, Dec 1981.
-
[R95] Jeffery Richter, Advanced Windows: The Developers Guide to the Win32
API for Widows NT 3.5 and Windows 95 , Microsoft Press, Redmond, WA, 1995.
-
[S90] V. S. Sunderam. PVM: A Framework for Parallel Distributed Computing.
Concurrency: Practice and Experience, 2(4):315-339, 1990.
-
[SB97] E. Speight and J. K. Bennet, Brazos: A Third Generation DSM System,
USENIX Windows NT Workshop, 1997.
-
[SD97] S. Sardesai and P. Dasgupta, Chime: A Versatile Distributed
Parallel Processing Environmen, Technical Report, TR-97-002, Department
of Computer Science and Engineering, Arizona State University, 1997. Also
available via www.eas.asu.edu/~calypso
|
|
|
|
|
|
| |
|
|
