Once deployed, nodes in a sensor network are assumed to establish their location and remain motionless except due to environmental factors such as wind and water. In an important departure from the typical mobile ad hoc wireless network model, nodes in sensor network literature do not have IP-address, and do not run the TCP/IP protocol suite. Instead of possessing unique ID's, sensor network nodes are usually referenced by attributes such as location. Both localization services [4,30] that establish sensor network coordinate frameworks, and location-based routing services [17,3] that route messages geographically have been discussed at length in previous literature.
Sensor nodes may perform local processing as appropriate for their particular application. This could be aggregating and reporting raw data, triangulating the position of an event, coming to agreement about an actuation or reporting strategy, or performing distributed event analysis. A distributed application, such as a distributed intrusion response system, may need to pass the results of such local processing among the respective groups of sensors to coordinate a sensor network reaction.
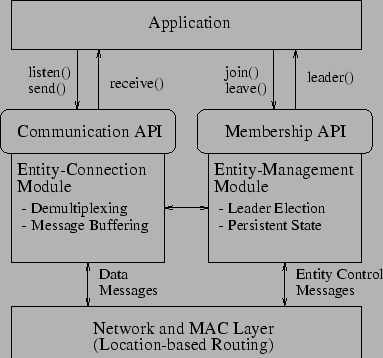
Our service can be thought of as a distributed protocol that sits in the transport layer of the sensor node's protocol stack. In its basic form, the protocol implementation consists of two modules, namely, the entity management module (EMM), and the entity connection module (ECM). These modules are shown in Figure 1. As the name suggests, the EMM forms a local entity in response to sensor readings at the locations of environmental events. It maintains the unique identity of this entity as the event of interest migrates in the environment. The ECM provides a means for entity registration, maintains communication end-points, and provides connectivity to allow communication among different entities. The following sections discuss the details of the APIs and implementations of the aforementioned modules.