|
MobiSys '03 Paper
[MobiSys '03 Tech Program Index]
| Pp. 273-286 of the Proceedings |  |
Tactics-Based Remote Execution for Mobile Computing
Rajesh Krishna Balanf ,
Mahadev Satyanarayananff ,
SoYoung Parkf ,
Tadashi Okoshif
f Carnegie Mellon University and f Intel Research Pittsburgh
{rajesh,satya,seraphin,slash}@cs.cmu.edu
Abstract
Remote execution can transform the puniest mobile device into a
computing giant able to run resource-intensive applications such as natural
language translation, speech recognition, face recognition, and augmented
reality. However, easily partitioning these applications for remote
execution while retaining application-specific information has proven to be
a difficult challenge. In this paper, we show that automated dynamic
re-partitioning of mobile applications can be reconciled with the need to
exploit application-specific knowledge. We show that the useful knowledge
about an application relevant to remote execution can be captured in a
compact declarative form called tactics. Tactics capture the full
range of meaningful partitions of an application and are very small relative
to code size. We present the design of a tactics-based remote execution
system, Chroma, that performs comparably to a runtime system that makes
perfect partitioning decisions. Furthermore, we show that Chroma can
automatically use extra resources in an over-provisioned environment to
improve application performance.
1 Introduction
Remote execution can transform the puniest mobile device into a
computing giant. This would enable resource-intensive applications such as
natural language translation, speech recognition, face recognition, and
augmented reality to be run on tiny handheld, wearable or body-implanted
platforms. Nearby compute servers, connected through a low-latency wireless
LAN, can provide the CPU cycles, memory, and energy needed for such
applications.
Unfortunately, two annoying facts cloud this rosy future. First, the
optimal partitioning of an interactive application into local and remote
components is highly application-specific and platform-specific. Since
mobile hardware evolves rapidly, this optimal partitioning changes on the
timescale of months rather than years. Suboptimal partitioning can result
in sluggish and intolerable interactive response. Hence, a tight and
ongoing coupling between application developers and hardware platform
developers appears inevitable. Second, matters are made worse by the fact
that mobile environments exhibit highly variable resource availability.
Bandwidth, energy and presence of compute servers can change on the
timescale of minutes or hours, as a user moves to different locations.
Re-partitioning an application for changed operating conditions at this
timescale is therefore essential. These considerations suggest that an
automated approach to partitioning applications for remote execution is
necessary. However, partitioning an application without taking into
consideration its unique characteristics may result in sub-optimal
partitions.
Can automated dynamic re-partitioning be reconciled with the need to
exploit application-specific knowledge? In this paper, we show that this is
indeed possible. Our key insight is that the knowledge about an
application relevant to remote execution can be captured in compact
declarative form that is very small relative to code size. More
specifically, the full range of meaningful partitions of an application can
be described in a compact external description called remote execution
tactics or just tactics for brevity. Thus, the tactics for an
application constitute the limited and controlled exposure of
application-specific knowledge necessary for making effective partitioning
and placement decisions for that application in a mobile computing
environment.
In this paper, we examine three applications of the genre mentioned earlier
(natural language translation, speech recognition, and face recognition) and
show that the tactics for each is much less than one percent of total code
size. We present the design of Chroma, a tactics-based remote
execution system, and show that sound partitioning and placement of these
applications using tactics is possible. We show that Chroma is able to
achieve application performance that is comparable to execution on an ideal
runtime system.
In addition, we show that Chroma can opportunistically utilize extra
resources in an over-provisioned environment. This allows us to achieve
lower latencies for the three applications mentioned above.
The rest of this paper is organized as follows:
Section 2 presents the assumptions and goals of
this work while Section 3 presents the design of
Chroma. We present our experimental setup in Section 4.
Sections 5 and 6 present Chroma's
performance relative to an ideal runtime system. In
Section 7, we show how tactics can improve
application performance in the presence of extra resources.
Section 8 presents related work and
Section 9 concludes the paper.
2 Design Rationale
2.1 Assumptions
In this work, we assume that all code necessary for remote execution is
already present on all the clients and servers. We do not perform any code
migration and use coarse-grained remote execution on the order of seconds.
This granularity is appropriate for the class of applications being
targeted. This is in contrast to other remote execution systems, like Java
RMI [21], that perform fine-grained remote execution on the order
of microseconds. We assume that the individual remote calls that make up the
remote execution are self-contained and do not produce side effects.
Since Chroma is meant to be used on mobile devices, we assume a highly
variable resource environment. Network characteristics and remote
infrastructure available for hosting computation vary with location. File
cache state and CPU load on local and remote machines significantly impact
application performance. Application energy consumption varies depending
upon the specific platform on which an application executes. Variation in
any resource can significantly change the best placement of functionality.
Thus, Chroma must continually monitor resource availability and adapt to
changes in the environment.
The class of applications that we are targeting are computationally
intensive interactive applications. Examples include speech recognition,
natural language translation and augmented reality applications. These are
the kinds of applications that have been envisioned as being key mobile
applications in the near future [18,23].
We assume that Chroma will not require applications to be developed from
scratch. Instead Chroma will use existing applications that have been
slightly modified to work with Chroma. This is a realistic assumption
because building new applications from scratch requires huge amounts of
effort. This is likely to be unprofitable when application development time
becomes comparable to the useful lifetime of the wearable and/or handheld
hardware being targeted. In this paper, we do not address the security and
admission control issues involved in using remote servers.
Chroma was designed to achieve three major goals. These are:
- Seamless from user perspective: The user should be oblivious
to the decisions being made by Chroma and the actual execution of those
decisions.
- Effectiveness : Chroma should employ close to optimal
strategies for remote execution under all resource conditions. An
application developer should not be tempted to hand tune.
- Minimal burden on application writers: We want Chroma to
be an easy system for application writers to use.
2.3 Solution Strategy
2.3.1 Seamless from user perspective
We achieved this goal by making Chroma completely automatic from the
perspective of the application user. Chroma was designed to work with
interactive applications which demand user attention due to their
interactive nature. As such, Chroma was designed to require
minimal additional user attention. The user specifies high-level
preferences in advance to Chroma to guide its decision making process. With
these preferences, Chroma will decide at runtime how and where to execute
applications. The user is oblivious to these decisions in normal use of the
system.
2.3.2 Effectiveness
To achieve the best possible performance, Chroma should use the optimal
strategy for remote execution for any particular resource condition. But how
do we determine what that optimal strategy is? In theory, it is possible,
for every resource condition, to test every single way of splitting an
application for remote execution and then picking the best strategy.
However, this is intractable in practice. Another method is just to pick one
possible way of splitting up the application and using it all the time.
However, this static method will be ineffective when resources change. The
key insight that allows us to achieve our performance goal while keeping the
search space small is this:
For every application, the number of useful ways of splitting the
application for remote execution is small.
We call these useful ways of splitting the application the tactics of
the application. Tactics are specified by the application developer and are
high level descriptions of meaningful module-level partitions of an
application. Our experience with modifying applications in the course of
this work suggests that it is easy for an application developer to provide
the tactics for an application.
An application is made up of operations. An operation is an
application-specific notion of work. Tactics enumerate the various ways that
an operation can be usefully executed. For example, an operation for a
speech recognition application would be recognize_utterance while an
operation for a graphics application would be render. For each
operation, the application developer specifies one or more tactics. These
different tactics may differ in the amount of resources they use and their
fidelity [15]. Fidelity refers to an application specific
metric of quality. For example, speech recognition has higher fidelity when
using a large vocabulary rather than a small vocabulary. Fidelity ranges
from 0 to 1, with 1 being the best quality and 0 the worst.
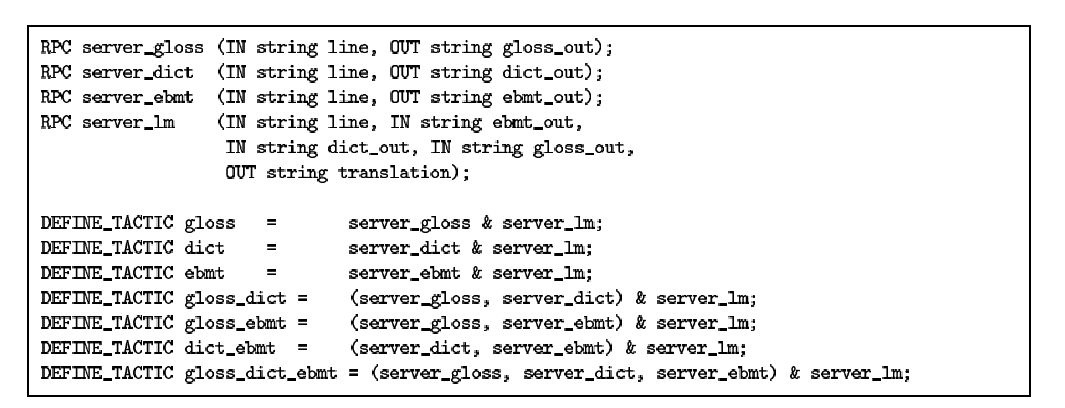
| Pangloss-Lite has seven tactics that are listed after the DEFINE_TACTIC
keyword. These seven tactics give different ways of combining the remote
calls (listed after the keyword RPC) for this application. Each of these
calls can be executed locally or at a remote server and this is determined
at runtime by Chroma
|
Figure 1: Tactics for Pangloss-Lite
2.3.3 Minimal Burden on Application Writers
Developing mobile computing applications is especially difficult because
they have to be adaptive [6,10]. The resource
constraints of mobile devices, the uncertainty of wireless communication
quality, the concern for battery life, and the lowered trust typical of
mobile environments all combine to complicate the design of mobile
applications. Only through dynamic adaptation in response to varying runtime
conditions can applications provide a satisfactory user experience.
Unfortunately, the complexity of writing and debugging adaptive code adds to
the application software development time. Hence, instead of building the
mechanisms to detect resource availability and trigger adaptation directly
into each application, we created a runtime system that provides this
functionality. However, the question still remains: How do we easily modify
existing applications to use the adaptation features provided by our
runtime?
Our approach to achieving this goal can be summarized as follows: First, we
provide a lightweight semi-automatic process for customizing the API used by
the application. Such customization is targeted to the specific needs of the
application. Second, we provide tools for automatic generation of code stubs
that map the customized API to the generic API used by Chroma. Finally, this
generic API is supported by Chroma, which monitors resource levels and
triggers application adaptation. Chroma support also helps ensure that the
adaptations of multiple concurrently executing applications do not interfere
with each other. Further details about the software engineering aspects of
Chroma can be found elsewhere [2].
3 Chroma Design
In this section, we present the design of our tactics-based remote execution
system, Chroma, that satisfies the goals described in
Section 2. Building Chroma required two main
components:
- A way of describing tactics.
- A method for selecting a tactic at runtime.
3.1 Describing Tactics
Figure 1 shows the tactics for Pangloss-Lite, a
natural language translator. Pangloss-Lite uses up to three translation
engines (dictionary, ebmt and glossary) to translate a
sentence. The tactics specify the different ways of combining these engines
and are composed of two distinct portions. Using more than one engine
results in a better translation but at the cost of using more resources.
The first portion of the description (denoted by the keyword RPC)
details the remote calls that can be used for this application. The second
portion (denoted by the keyword DEFINE_TACTIC) defines the specific
sequence of remote calls that make up a particular tactic. An "&" separator
between remote calls denotes that the remote calls must be performed in
sequential order while remote calls within brackets ( (server_gloss,
server_ebmt) ) tell the remote execution system that those calls can
be executed in parallel.
Each tactic fully describes one way of combining RPCs to complete an
operation. The data dependencies between RPCs are visible because the
prototypes of the remote calls are specified in the tactics description.
Each of the individual remote calls that make up a particular tactic can be
run either locally or on any remote server. This decision is made at
runtime. Even though the tactics may differ in their resource usage and
fidelity, each tactic is guaranteed to produce a proper result for the given
operation if the remote calls are performed in the order specified by the
tactic (we assume no side effects as mentioned in
Section 2.1). Since the data dependencies and ordering
between remote calls is fully specified by the tactic description, Chroma is
able to parallelize the execution of these remote stages whenever possible.
This aspect of Chroma is explained further in Section 3.3.
A key point to note is that the description of the application's tactics is
very small compared to the size of the application. As shown in
Figure 1, it requires about 14 lines to specify the
tactics for Pangloss-Lite. This is in comparison to the roughly 150K lines
of code in Pangloss-Lite.
3.2 Tactic Selection
In this section we highlight the system components necessary for Chroma to
decide at runtime which tactic to use and where to execute it. For example,
if Chroma picks the tactic gloss_ebmt
(Figure 1) for Pangloss-Lite, it will also have to
decide whether to execute the server_gloss, server_ebmt and
server_lm remote calls of this tactic locally or remotely. Chroma's
goal is thus to decide on a tactic plan. A tactic plan is comprised of
a tactic number (denoting which tactic to use) along with a list that
specifies the server to use for each RPC in that tactic. Using the local
machine avoids network transmission and is unavoidable if the client is
disconnected. In contrast, using a remote machine incurs the delay and
energy cost of network communication but exploits the CPU and energy
resources of a remote server. Chroma enumerates through all possible tactic
plans and picks the best one for the given resource availability.
To be able to do this, first, Chroma needs to be able to predict the
resource usage of each tactic plan. Second, Chroma has to measure the
current resource availability. Third, Chroma requires guidance from the user
about the relative importance of each resource. Given these three things,
Chroma will be able to decide on the best tactic.
3.2.1 Resource Prediction
For a given operation and tactic plan, Chroma needs to be able to predict
the resources the tactic plan will require. This information is provided by
resource demand predictors that use history based
prediction [14]. The key idea here is that the resource usage
of a tactic plan can be predicted from its recent resource usage. The
demand prediction mechanisms are initialized by off-line logging. At
runtime, these predictors are updated using online monitoring and machine
learning to improve accuracy.
3.2.2 Resource Monitoring
Chroma uses multiple resource measurers to determine current resource
availability. These resource measurers currently measure memory usage, CPU
availability, available bandwidth, latency of operation, file cache state
and battery energy remaining. Chroma also has mechanisms to retrieve
resource availability information from remote servers.
3.2.3 User Guidance
To effectively match resource demand to resource availability, Chroma needs
to trade off resources for fidelity. How to perform this tradeoff is
frequently context sensitive and thus dynamic. For instance, would the user
of a language translator prefer accurate translations or snappy response
times? Should an application running on a mobile device use power-saving
modes to preserve battery charge, or should it use resources liberally in
order to complete the user's task before he or she runs off to board their
plane? That knowledge is very hard to obtain at the application level as it
is user-specific and not application-specific.
We provide Chroma with these user-specific resource tradeoffs in the form of
utility functions. A utility function is a user-specific function that
quantifies the tradeoff between two or more attributes.
In this paper, we use a fixed utility function that states that latency is
as important as fidelity and that Chroma should ignore battery lifetimes.
Chroma will thus choose the tactic plan that maximizes the
latency-fidelity metric (expressed mathematically as maximizing the
quantity [ fidelity/latency] ). In our future work, we plan to
develop methods that will allow us to capture different utility functions
from the user using a graphical user interface. These different utility
functions will allow us to optimize the tactic selection for other user
specified metrics like conserving battery power or minimizing network
bandwidth.
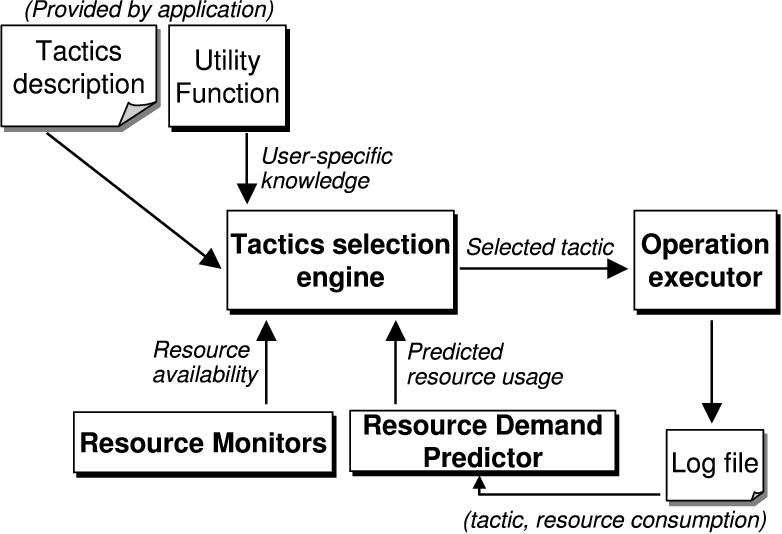 Figure 2: Choosing a Tactic
Figure 2: Choosing a Tactic
3.2.4 Selection Process
Figure 2 shows how all the components work
together. Chroma determines expected resource demand for each tactic of the
current operation by querying the resource prediction component. At the same
time, Chroma determines the available resources via the resource monitoring
component. These resource monitors also query any available remote servers
to determine the resource availability on those servers. This information is
necessary as the latency of the tactic is determined by where each
individual remote call in that tactic is being executed. Determining
resource availability on demand can be a very time consuming operation.
Hence, to improve performance at the cost of accuracy, the resource monitors
perform these queries periodically in the background and cache the results.
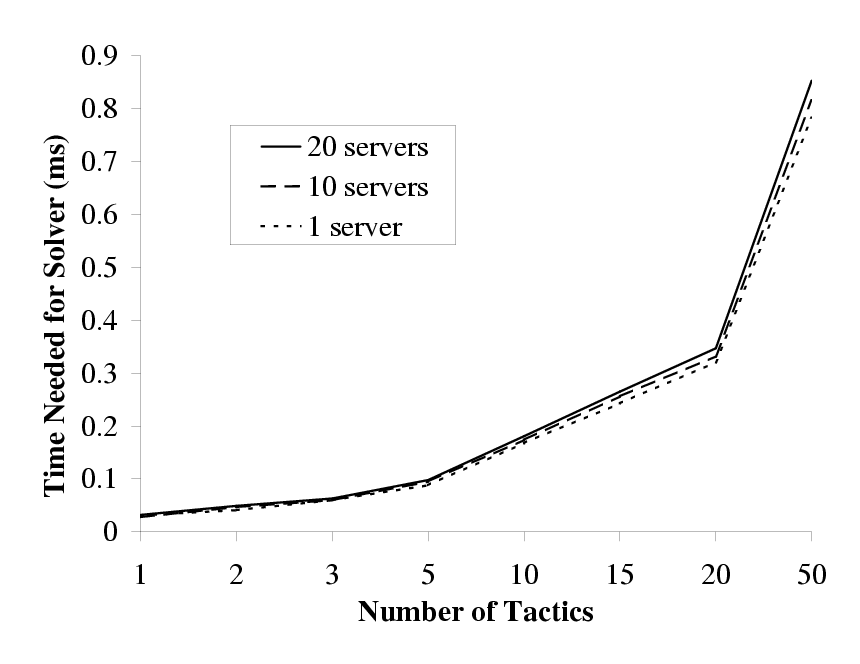
| This figure shows the overhead incurred (in milliseconds) by the solver in
deciding which tactic to choose. The overhead shown is only for the
computational aspect of the solver and does not include the time needed by
other parts of Chroma such as the resource estimators and resource demand
predictors. To obtain these results, we extracted the core solver from
Chroma and supplied it with synthetic inputs. This allowed us to measure
just the overhead of the solver. The total measured overhead of Chroma is
shown in Section 6.
|
Figure 3: Overhead of Choosing a Tactic
Chroma iterates through every possible tactic plan and picks the best tactic
plan to use for this operation. It does this by picking the tactic plan that
maximizes the latency-fidelity utility function metric. The tactic plan is
then executed and its resource usage is logged to refine future demand
prediction. This brute force method works well for a small number of
tactics as shown in Figure 3. From the results in
Section 6, we see that the contribution of the
solver to the total Chroma overhead is minimal. We claim that, in practice,
the number of useful tactics for computationally intensive interactive
applications is small enough to allow this brute force tactic selection
mechanism. We are currently verifying this claim and also looking at using
other solvers that are both less computationally demanding and provably
correct [11].
3.3 Over-Provisioned Environments
Our discussion so far has focused on environments that are resource
constrained. However, environments such as smart rooms, may be
over-provisioned. Over-provisioned environments are characterized as having
more computing resources than are actually needed for normal operation. We
would like to have a system that works well if resources are scarce but is
able to immediately make use of over-provisioning if it becomes available.
Our goal is to exploit idle resources to improve user experience.
Tactics help by providing the knowledge of the remotes calls needed by a
given operation and the data dependencies between them. Chroma can use the
knowledge in tactics opportunistically to improve user experience in three
different ways.
First, Chroma can make multiple remote execution calls (for the same
operation) to remote servers and use the fastest result. For example, Chroma
can execute the glossary engine of Pangloss-Lite at multiple servers and use
the fastest result. Chroma knows that it can do this safely because the
description of the tactics makes it clear that executing the glossary engine
is a stand-alone operation and does not require any previous results or
state. We call this optimization method "fastest result".
Second, Chroma can split the work necessary for an operation among multiple
servers. It does this by decomposing operation data into smaller chunks and
shipping each chunk to a different remote server. Chroma uses hints from the
application to determine the proper method of splitting operation data into
smaller chunks. We call this optimization "data decomposition".
Third, Chroma can perform the same operation but with different fidelities
at different servers. Chroma can then return the highest fidelity result
that satisfies the latency constraints of the application. For example,
Chroma can execute multiple instances of the ebmt engine of
Pangloss-Lite in parallel at separate servers (all with different
fidelities) and use the highest fidelity result that has returned before a
specified amount of time. We call this optimization method "best
fidelity".
Tactics allow us to use these optimizations on behalf of applications
automatically without the applications needing to be re-compiled or modified
in any way. There are other optimizations possible with tactics, but these
are the ones we have explored so far and we present performance results for
them in Section 7.
4 Validation Approach
4.1 Applications
To validate the design of Chroma, we have used three applications that are
representative of the needs of a future mobile user. These applications are
all computationally intensive interactive applications that are currently
being actively developed for mobile environments. These applications are
- Pangloss-Lite [7] : A natural language translator
written in C++ for translating sentences in one language to another. This
kind of application is important for the modern mobile user who is moving
from country to country.
- Janus [22] : A speech to text conversion program written
in C that can be used to convert voice input into text. This kind of
application is at the core of any voice recognition system that is used to
control mobile devices.
- Face [20] : A program written in Ada that detects
faces in images and is representative of image processing applications.
Surveillance personnel, with wearable computers, that use images to detect
suspicious features in the environment are likely to require this kind of
application.
4.2 Experimental Platform
We used HP Omnibook 6000 notebooks with 256 MB of memory, a 20 GB hard disk
and a 1 GHz Mobile Pentium 3 processor as our remote servers.
We used two different clients that represent the range of computational
power available in today's mobile devices. The fast client is the
above mentioned HP Omnibook 6000 notebook. The slow client is an IBM
Thinkpad 560X notebook with 96 MB of memory and a 233 MHz Mobile Pentium MMX
CPU. The computational power of the Thinkpad 560X is representative of
today's most powerful handheld devices.
The clients and servers ran Linux and were connected via a 100 Mb/s Ethernet
network. A deployed version of Chroma would use a wireless LAN such as
802.11a (55 Mb/s). We used the Coda [19] distributed file system
to share application code between the clients and servers.
4.3 Success Criteria
To successfully validate Chroma, we need to show the following things:
- Chroma is able to correctly pick the best tactic plan for a
particular application and resource availability. We demonstrate this by
showing that Chroma picks the tactic plan that maximizes (or comes close to
maximizing) the latency-fidelity metric.
- The overhead of Chroma's decision making process is not too large and
does not add substantially to the total latency of the application.
- Chroma is able to use tactics to automatically improve application
performance in the presence of additional server resources.
The validation of these three parts will justify our claim that tactics are
a valuable. Sections 5, 6
and 7 present our results relative to the above
points.
5 Results: Tactic Selection
Since Chroma automatically determines how to remotely execute an application
based on the current resources, it is possible that the decisions it makes
are not as good as a careful manual remote partitioning of the application.
We allay this concern by showing that Chroma's partitioning comes close to
the optimal partitioning possible for a number of different applications and
operating conditions.
To demonstrate this, we compare the decision making of Chroma with that of
an ideal runtime system. This ideal runtime system is achieved by manually
testing every possible tactic plan for a given experiment and then choosing
the best one. Chroma, on the other hand, has to figure out the best tactic
plan dynamically at runtime. We define the best tactic plan as being the one
that maximizes the latency-fidelity metric. We show that Chroma chooses a
tactic plan that either maximizes the latency-fidelity metric or comes very
close to it.
Each experiment was repeated five times and our results are shown with 90%
confidence intervals where applicable. Since Chroma uses history-based
demand prediction, we created history logs for each application before
running the experiments using training data that was not used in the actual
experiments. These logs provide the system with the proper prediction values
for the application. Without these logs, the system would have to slowly
learn the correct prediction values online and this could take a long time.
| Sentence Length | Ideal Runtime | Chroma | Ratio |
| (No. of Words) | chosen tactic | metric | chosen tactic | metric | | |
| | 11 | gloss_dict_ebmt | 1.00 | gloss_dict_ebmt | 1.00 | 1.00 |
| 23 | gloss_dict_ebmt | 1.00 | dict_ebmt | 0.70 | 0.70 |
| 35 | gloss_dict_ebmt | 1.00 | dict_ebmt | 0.70 | 0.70 |
| 47 | gloss_dict_ebmt | 0.70 | dict_ebmt | 0.70 | 1.00 |
| 59 | dict_ebmt | 0.70 | dict_ebmt | 0.70 | 1.00 |
|
|
| (a) Fast Client |
|
| Sentence Length | Ideal Runtime | Chroma | Ratio |
| (No. of Words) | chosen tactic | metric | chosen tactic | metric | | |
| | 11 | gloss_dict_ebmt | 1.00 | gloss_dict_ebmt | 1.00 | 1.00 |
| 23 | gloss_dict_ebmt | 1.00 | gloss_dict_ebmt | 1.00 | 1.00 |
| 35 | gloss_dict_ebmt | 1.00 | dict_ebmt | 0.70 | 0.70 |
| 47 | dict_ebmt | 0.70 | dict_ebmt | 0.70 | 1.00 |
| 59 | dict_ebmt | 0.70 | dict_ebmt | 0.70 | 1.00 |
|
|
| (b) Slow Client
|
| | This table shows the tactic plan chosen by Chroma and the ideal runtime. The
locations chosen by Chroma and the ideal runtime were identical in all cases
and are thus omitted from the table. We also show the value of the
latency-fidelity metric for the tactic plans chosen by the two systems. The
ratio ([ Chroma/Ideal]) between the ideal system's metric and
Chroma's is shown in the Ratio column.
|
| |
Figure 4: Comparison Between the Ideal Runtime and Chroma for Pangloss-Lite
5.1 Pangloss-Lite
5.1.1 Description
As mentioned in Section 3.1, Pangloss-Lite translates
text from one language to another. It can use up to three translation
engines: EBMT (example-based machine translation), glossary-based, and
dictionary-based. Each engine returns a set of potential translations for
phrases within the input text. A language modeler combines their output to
generate the final translation.
Pangloss-Lite's fidelity increases with the number of engines used for
translation. We assign the EBMT engine a fidelity of 0.5. The glossary and
dictionary engines produce subjectively worse translations-we assign them
fidelity levels of 0.3 and 0.2, respectively. When multiple engines are
used, we add their individual fidelities since the language modeler can
combine their outputs to produce a better translation. For example, when
the EBMT and glossary-based engines are used, we assign a fidelity of 0.8.
The seven possible combinations of the engines are captured by the seven
tactics (shown in Fig 1).
We use the latency-fidelity utility function to determine the tactic to use
for Pangloss-Lite. However, to model the preferences of an interactive
user, we specify that all latencies of one second or lower are equally good
and that all latencies larger than five seconds are impossibly bad. Thus if
the latency is greater than five seconds, we set the latency to a really
large number (thus making the utility value really small) and if the latency
is one second or lower, we set the latency value to one. All other latency
values are left unchanged.
All three engines and the language modeler may be executed remotely. While
execution of each engine is optional, the language modeler must always
execute. Thus, there are at least 52 tactic plans from which Chroma may
choose when at least one remote server is available.
We used as input five sentences with different number of words (ranging from
11 words to 59 words) as inputs for the baseline experiments. The input
sentences were in Spanish and were translated into English. There were three
remote servers available and both the servers and the clients were unloaded
for the purposes of this experiment.
| Utterance | Ideal Runtime | Chroma | Ratio |
| chosen | metric | chosen | metric | |
| tactic | | tactic | | | |
| | 1 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 2 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 3 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 4 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 5 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 6 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 7 | full | 0.53 | reduced | 0.50 | 0.94 |
| 8 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 9 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 10 | reduced | 0.50 | reduced | 0.50 | 1.00 |
|
| Utterance | Ideal Runtime | Chroma | Ratio |
| chosen | metric | chosen | metric | |
| tactic | | tactic | | | |
| | 1 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 2 | reduced | 0.50 | reduced | 0.48 | 0.96 |
| 3 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 4 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 5 | reduced | 0.50 | reduced | 0.49 | 0.98 |
| 6 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 7 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 8 | reduced | 0.42 | reduced | 0.41 | 0.98 |
| 9 | reduced | 0.50 | reduced | 0.50 | 1.00 |
| 10 | reduced | 0.50 | reduced | 0.48 | 0.96 |
|
| (a) Fast client | (b) Slow Client |
|
| This table shows the tactic plan chosen by Chroma and the ideal runtime. The
locations chosen by Chroma and the ideal runtime were identical in all cases
and are thus omitted from the table. We also show the value of the
latency-fidelity metric for the tactic plans chosen by the two systems. The
ratio ([ Chroma/Ideal]) between the ideal system's metric and
Chroma's is shown in the Ratio column.
|
Figure 5: Comparison Between the Ideal Runtime and
Chroma for Janus
Figures 4 displays the decisions made by
Chroma compared with the decisions made by the ideal runtime for each
sentence on the fast and slow clients respectively. From the results, we see
that Chroma made decisions that approximated the decisions made by the ideal
runtime system. In the cases where Chroma made a different decision, it was
off by 30%. This difference in decision making was due to incorrect
resource estimations by Chroma. From the results, we see that Chroma decided
not to run the glossary engine in the cases where it differed from the
ideal runtime. The time needed for the glossary engine to complete a
translation was hard for Chroma to predict as it was not a simple function
of the length of the input sentence. Chroma's decision to drop the
glossary engine incurred a 30% reduction in fidelity and this resulted in
the final 30% difference in Ratio. The latencies used to calculate the
metric were below 1 second for both Chroma and the ideal runtime system in
all the cases where the metrics differed.
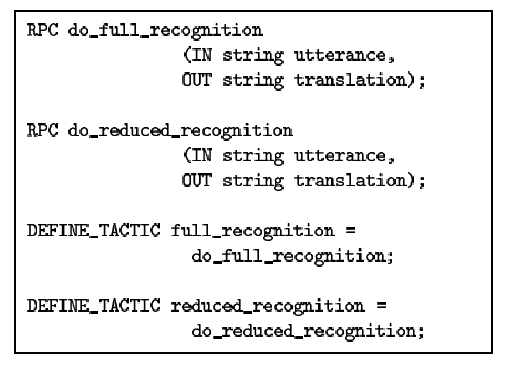
| The tactics declaration for Janus contains two remote calls
(do_full_recognition and do_reduced_recognition) that can be run either
locally or remotely.
|
Figure 6: Tactics for Janus
5.2.1 Description
Janus performs speech-to-text translation of spoken phrases. Recognition can
be performed at either full or reduced fidelity. The reduced fidelity uses a
smaller, more task-specific vocabulary that limits the number of phrases
that can be successfully recognized but requires less time to recognize a
phrase. We assign the reduced fidelity a utility of 0.5 and the full
fidelity a utility of 1.0 to reflect this behavior. Similar to
Pangloss-Lite, we model an interactive user by making all latencies less
than or equal to one second equally good (we set the latency value to one)
and all latencies greater than five seconds horribly bad (we set the latency
to a really large number). All other latency values are left unchanged.
Janus has two remote calls that can be executed either locally or remotely.
These two possible ways of executing Janus are captured by Janus's tactics,
as shown in Figure 6. The tactic
full_recognition uses the full fidelity vocabulary to do the recognition
while the tactic reduced_recognition uses the reduced fidelity
vocabulary to do the recognition. Describing Janus's tactics requires 4
lines of code in our declarative language. This is significantly smaller
than Janus itself which is
» 120K lines of C code.
We used as input ten different utterances containing different numbers of
spoken words (ranging from 3 words to 10 words) as inputs for the baseline
experiments. One remote server was used for this experiment and both the
server and the clients were unloaded.
Figure 5 shows the decisions made by the ideal
runtime and Chroma. We see that Chroma picked the optimal choice in almost
all cases on the fast client. Even in the case where Chroma picked a
different tactic plan, the latency-fidelity metric of the plan picked by
Chroma was very close to optimal (94% of optimal). On the slow client,
Chroma performed as well as the ideal runtime. In all cases, Chroma picked
the same tactic plan as the ideal runtime system and the differences in the
metric were due to experimental errors in the latency measurements.
 |  |
| (a) Fast Client | (b) Slow Client
|
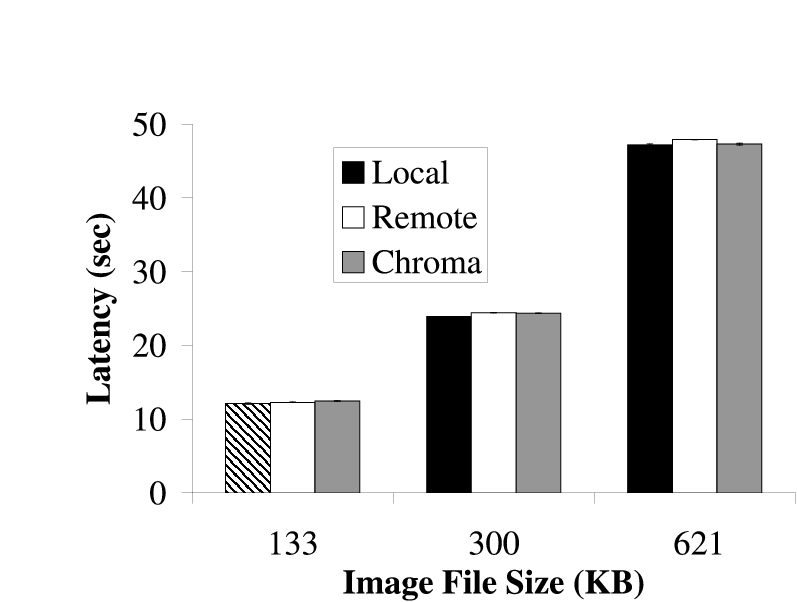
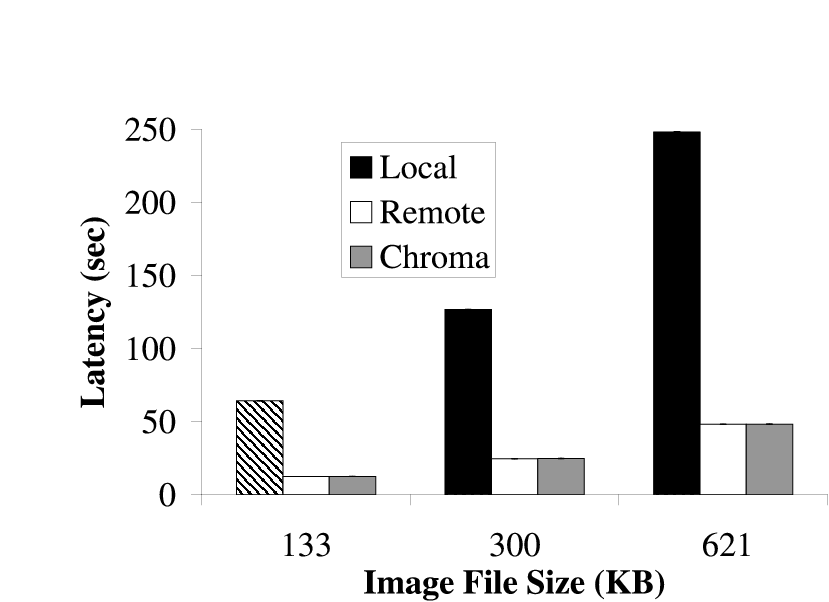
| The latency that was achieved by executing Face remotely and locally for all
inputs on both clients is shown. In all cases, Chroma picked the option that
minimized latency. This maximized the latency-fidelity metric as the
fidelity was constant in all cases.
|
Figure 7: Relative Latency for Face
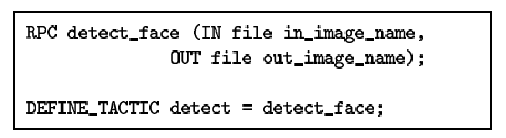
| Face has only one remote call (detect_face) that can be run either locally
or remotely. This is captured by its single tactic.
|
Figure 8: Tactics for Face
5.3.1 Description
Face is a program that detects human faces in images. It is representative
of image processing applications of value to mobile users. Face can
potentially change its fidelity by degrading the quality of the input image.
However, for the purposes of this experiment, all experiments were run with
full fidelity images.
Face can be run either entirely locally or entirely remotely. In both cases,
it runs the exact same remote procedure and it has no other modes of
operation. It thus has only one tactic and this is shown in
Figure 8. Even though Face has only one tactic, this
does not mean that it cannot benefit from tactics. We show in
Section 7.2 how Chroma can use this single tactic to improve
the performance of Face by using extra resources in the environment. Face is
written in Ada and has » 20K lines of code while the description of
its tactics requires just 2 lines.
We used as input three different image files of different size (ranging from
133 KB to 621 KB in size) as inputs for the baseline experiments. There was
one remote server available and both the server and the clients were
unloaded.
Figure 7 shows the latency that can be achieved when
doing the face recognition locally and remotely for both configurations.
Since the fidelity was constant (full quality images) in all the
experiments, maximizing the latency-fidelity metric would require Chroma to
pick the option that minimized the latency. We see that in all cases, Chroma
chose the option that maximized the latency-fidelity metric by picking the
tactic plan that minimized the latency.
The graphs show that Face has extremely high latencies; on the order of tens
of seconds per image. We will show how tactics allow us to reduce this
latency without sacrificing fidelity in Section 7.2.
5.4 Summary
Sections 5.1, 5.2
and 5.3 described the performance of Chroma relative to
an ideal runtime system for Pangloss-Lite, Janus and Face respectively. We
see that while Chroma is not perfect, its performance is still comparable to
an ideal runtime system. We believe that the results indicate that it is
viable to build a tactics-based remote execution system that provides good
application performance.
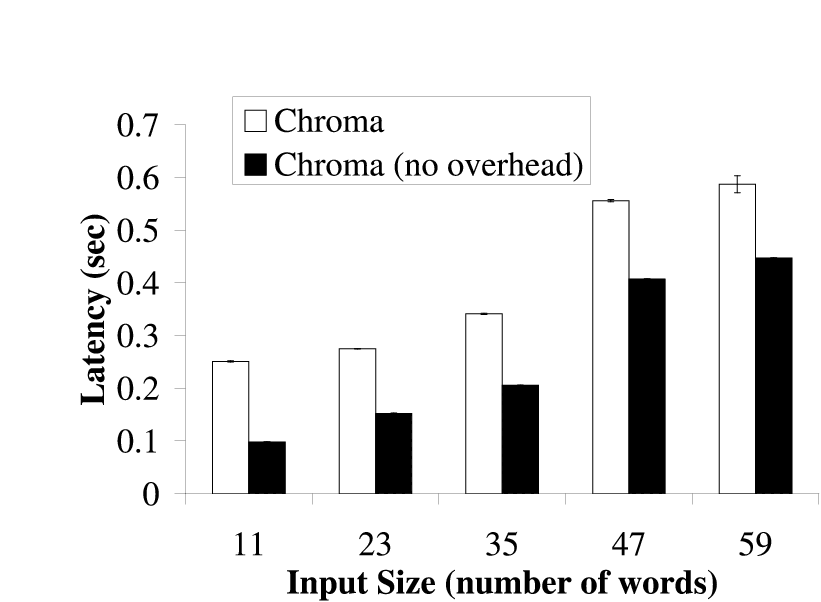 |  |
| (a) Fast Client | (b) Slow Client
|
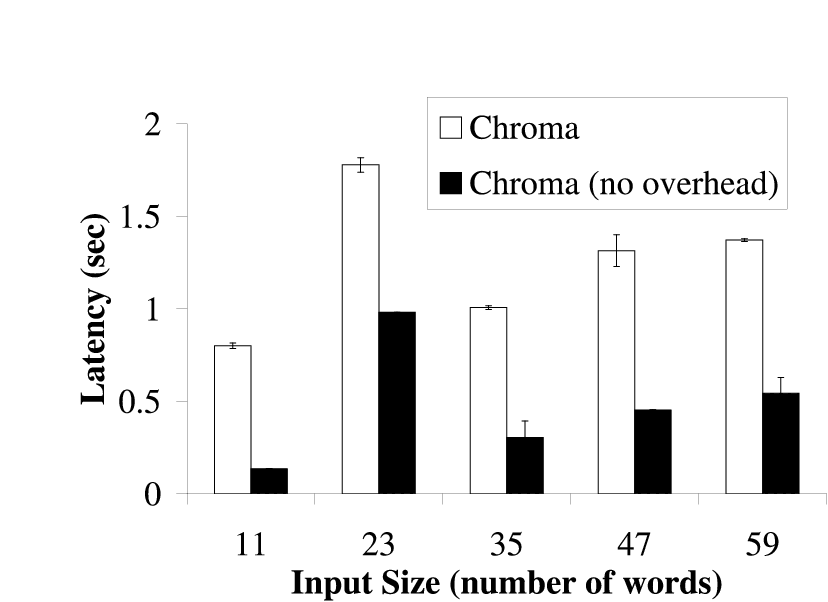
| The bars show the time needed for different tactic plans to execute with and
without Chroma's decision making process. The difference in time represents
the overhead of Chroma's decision making process. The tactic plans used in
this experiment are the same ones Chroma chose in
Figure 4 for the different inputs. The
results are the average of 5 runs and are shown with 90% confidence
intervals.
|
Figure 9: Overhead of Decision Making for Pangloss-Lite
6 Results: Chroma's Overhead
In this section, we present the CPU overhead of Chroma's decision making
using Pangloss-Lite as the example application. Pangloss-Lite has the
largest number of tactic plans among all the applications used in this paper
and required Chroma to do the most decision making. As such, we do not
present the overhead results for the other applications as they were
strictly less than the overhead incurred for Pangloss-Lite.
Figure 9 shows the overhead of Chroma's
decision making. This overhead represents the time that Chroma needs to
determine the tactic plan to use. Chroma currently does not take its own
overhead into account when making placement decisions and thus can achieve
longer latencies than it expected. This is more apparent on slower clients
as it takes longer for Chroma to make its decisions on these computationally
weaker clients. From the figure, we see that Chroma's maximum overhead was
less than 0.5 seconds. This overhead, while somewhat high, was still acceptable
for the class of applications being targeted. We are currently improving
the internal algorithms used in Chroma to reduce this overhead.
7 Results: Over Provisioning
In this section, we show the performance improvements that Chroma achieves
by opportunistically using extra resources in the environment. These extra
resources take the form of extra available servers that can be used for
remotely executing application components. We used the slow client for
these experiments.
To show the benefits of this approach, we introduced an artificial load on
the server that Chroma selected to remotely execute application components.
This artificial load has an average load of 0.2 (i.e., on average, each CPU
was utilized only 20% of the time). However, the actual load pattern itself
is random. We chose a random load pattern to model the uncertainty
inherent in mobile environments where remote servers could suddenly perform
worse than expected due to a variety of random reasons (such as bandwidth
fluctuations, extra load at the server etc.). The average load was set at
0.2 to ensure that the servers were, on average, underutilized. In contrast,
a load of 0.8 (the CPU was utilized 80% of the time) or higher would
indicate a heavy load.
The overall scenario we are assuming for this section is as follows; Chroma
has decided where to remotely execute an application component. At the time
it made the decision, Chroma noticed that the remote server was capable of
satisfying the latency requirements of the operation. However, when the
operation was actually executed, the actual average latency was much higher
due to the random load on the server that Chroma was unaware of. We show
results to quantify just how bad the average latency (and variance) becomes
and how opportunistically using extra servers in the environment can help
improve this. These extra servers can be used in the three ways detailed in
Section 3.3 to allow us to:
- Hedge against load spikes at the remote servers: the same
operation can be run on multiple servers using the "fastest result"
method.
- Improve the total latency of an operation without sacrificing
fidelity: the operation can be broken up into smaller parts using the "data
decomposition" method and each smaller part run on a separate server.
- Satisfy absolute latency constraints of an application while
providing the best possible fidelity: the operation can be run at different
servers (where each server runs the operation at a different fidelity) using
the "best fidelity" method and the best fidelity result that returns
within the latency constraint is returned to the application.
It should be noted again that all these methods can be used automatically at
runtime by Chroma without the application being aware of them. This is one
of the key benefits of using a tactics-based remote execution system.
7.1 Hedging Against Load Spikes
7.1.1 Description
This experiment shows how opportunistically using extra servers in the
environments provides protection against random load spikes at any
particular remote server. In this experiment, Chroma decides to execute the
glossary engine of Pangloss-Lite remotely to translate a sentence containing
35 words. We ran the translation of this sentence 100 times using a
different number of remote servers in parallel and noted the average latency
achieved and the standard deviation.
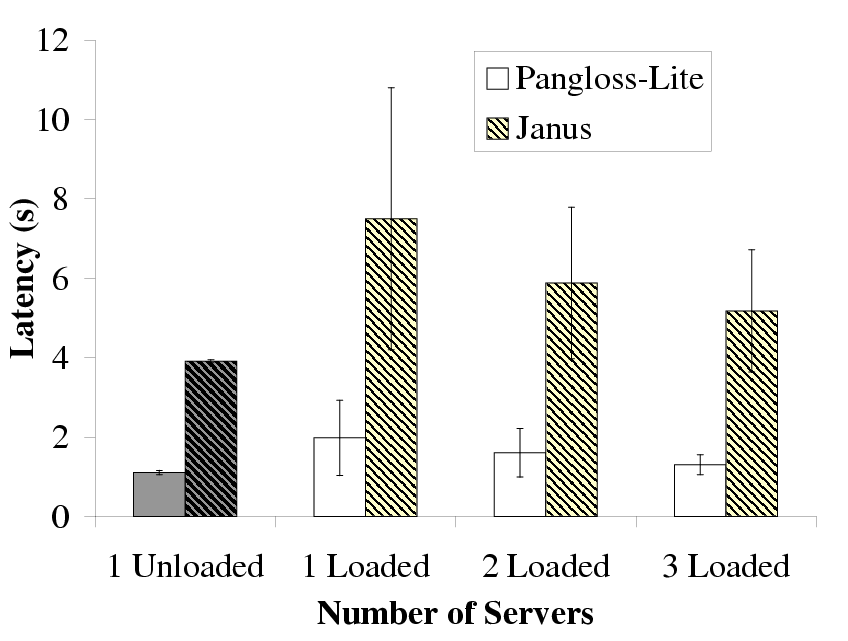
| This figure shows the use of multiple loaded servers to improve the
performance of Pangloss-Lite and Janus. As we increase the number of loaded
servers, the latency and standard deviation for both applications decrease
significantly and converge towards the best-case value (1 unloaded server).
|
Figure 10: Using Extra Loaded Servers to Improve Latency
Figure 10 shows the results we obtained from
executing the glossary engine remotely on a totally unloaded server and from
executing the glossary engine remotely on one, two and three servers
respectively that had the artificial load explained earlier.
Figure 10 also shows the results for Janus where the
recognition of utterance 5 is performed multiple times on remote servers.
The results for the totally unloaded server present the best possible
average latency and standard deviation. What we notice is that when the
remote server is loaded, executing the glossary engine or recognition
remotely at the server results in a much higher average latency and standard
deviation. We also notice that executing the glossary engine or recognition
on two remote servers that are randomly loaded (with the same average load)
reduces the latency and standard deviation significantly compared with the
single loaded server case. Executing the glossary engine or recognition on
more loaded remote servers reduces the average latency and standard
deviation even further and brings them closer to the best possible results.
The reduction in latency caused by using extra servers with load was due to
the load on the servers being uncorrelated. Hence, even though the average
load on the servers was the same, when one server was experiencing a load
spike, another server was unloaded and was able to service the request
faster. Our method of using extra servers thus maximizes the probability of
being able to execute the application component at an unloaded server.
This assumption of uncorrelated load is reasonable in a mobile environment
for the following reasons: if the remote servers are located in different
parts of the network, it is quite likely that they experience different load
patterns. This is also true for remote servers that are co-located but owned
by different entities. In the case where the remote servers are co-located
and owed by the same entity, it is possible that they experience the same
load patterns. However, in this case, enabling some sort of Ethernet-like
backoff system on the remote servers will ensure that the load on each
server is uncorrelated.
Of course, if every Chroma client is sending extra requests to every
available server, the assumption that the load on each server is
uncorrelated will not be true. We are currently studying various resource
management algorithms to ensure fair usage of extra servers. We are also
looking at mechanisms to allow the user to explicitly specify (if necessary)
which extra servers can be used and which should not.
7.2 Reducing Latency by Decomposition
7.2.1 Description
This experiment shows how decomposing an operation into smaller pieces and
executing each piece on a separate remote server reduces the overall latency
of the operation. As shown in Figure 7, Face had high
latencies for the three input files. However, this latency can be reduced in
two ways. Firstly, the input image can be reduced in size by scaling it.
However, this method reduces the fidelity of the result. The second method
is to break the image into smaller pieces and separately process each piece.
This method has the potential of improving the latency without reducing the
fidelity.
Here, we assume that the application has previously provided Chroma with the
methods for splitting and recombining the image files. Given these methods,
at runtime, Chroma is able to automatically split the input images to
improve application performance when extra servers become available.
| No. of | Average (s) | Standard | Latency |
| Servers Used | | Deviation (s) | Reduction | |
| | 1 | 24.54 | 0.05 | - |
| 2 | 13.59 | 0.05 | 44.6% |
| 3 | 9.73 | 0.07 | 60.4% |
| We see that splitting the input image for the operation into smaller pieces
and sending these smaller pieces to different remote servers results in a
dramatic reduction in total latency. The number of servers used corresponds
to the number of pieces the image file was split into.
|
Figure 11: Improvement in Face Latency by Decomposition
Figure 11 shows the results obtained by using this method.
We ran each experiment 5 times and measured the average latency and standard
deviation. The servers used were unloaded. The results show that splitting the image into smaller pieces
(allowing Chroma to parallelize the operation) results in a substantial
latency improvement (up to 60% reduction) over the original latency.
| Fidelity | Latency | Metric |
| | | Average (s) | Standard Deviation (s) | | |
| | Running to Completion | 1.0 | 1.96 | 0.15 | 0.51 |
| Taking Best Result after 1s | 0.75 | 1.00 | 0.01 | 0.77 |
| The table shows the latencies and fidelities obtained by running all three
translation engines (dict, gloss, ebmt) on the input on loaded servers. We
see that taking the best result that returns before 1 second results in a
higher latency-fidelity metric than using the highest fidelity result.
|
Figure 12: Achieving Latency Constraints for Pangloss-Lite
7.3 Meeting Latency Constraints
7.3.1 Description
Chroma allows an application to specify a latency constraint for a given
operation. This is frequently required for interactive applications to meet
user requirements. Chroma looks at the tactics for the application and
automatically decides how to remotely execute this operation in parallel
with different fidelity values for each parallel execution. For example, for
Pangloss-Lite, Chroma could chose to execute the dictionary, gloss and ebmt
translation engines on separate servers. When the latency constraint
expires, Chroma picks the completed result with the highest fidelity and
returns that to the application.
We present results for Pangloss-Lite to show experimentally the benefits of
this approach. For this experiment, we assume that the application has
specified a latency constraint of 1 second. There were three remote servers
available for Chroma to use. We use a sentence of 35 words as input. We load
all the servers with a random load of average value 0.2. We ran each
experiment 5 times.
Figure 12 shows the results for this experiment.
We see that by taking the best result after 1 second and returning that to
the application, Chroma is able to achieve a higher latency-fidelity metric
than by waiting for all the engines to finish and returning a full fidelity
result. During this experiment, Chroma did the following: It performed the
translation using a different translation engine (ebmt, gloss, dict)
on each of the three servers. When the latency constraint expired, Chroma
determined which engines had successfully finished translating. Chroma then
consulted the tactics description to determine how best to combine the
completed results to provide the highest fidelity output. All of these steps
can be done automatically by Chroma without application knowledge.
7.4 Summary
We have presented three different ways in which Chroma can use tactics to
automatically improve user experience in over-provisioned environments. The
improvement in each case was significant. Tactics allow us to obtain these
improvements automatically at runtime without the application being aware of
Chroma's decisions. The "data decomposition" method
(Section 7.2), was the only method that required prior input
from the application before it could be used. In this case, the application
needed to tell Chroma how its data could be split into smaller pieces and
recombined later. But even here, once Chroma had this information, it was
able to use extra available resources to improve application performance at
runtime without the application being aware of Chroma's optimizations.
8 Related Work
There have been a number of application-aware remote execution systems such
as Abacus [1], Coign [3] and Condor [8].
They perform well in environments where resource availability does not
change between the time the system decides how to remotely execute an
application and when it actually performs the remote execution.
However, this assumption comes under fire in mobile environments. These
environments are characterized by highly variable resource conditions that
change on the order of seconds [5,6,17]. Overcoming this uncertainty requires application-specific
knowledge on how to remotely partition the application.
An extra benefit of acquiring this knowledge is that it allows us to utilize
additional resources in over-provisioned environments such as smart spaces
with many idle compute servers. We envision that these environments will
become increasingly common in the new future. Our system is designed to
opportunistically use these extra resources to improve application
performance. We know of no other system that does this.
There have been other systems that have looked at the problem of
partitioning applications. These include systems that performed object
migration like Emerald [9] and systems that performed process
migration [13]. Other systems [16] looked at the
problem of service composition or the building of useful applications from
components available in the environment. Currently, we have concentrated on
the problem of identifying useful remote execution partitions of existing
applications and have not performed any form of code migration or service
composition.
The declarative language we use to express an application's tactics
addresses some of the same issues as 4GLs [12] and `little
"languages" [4]. The latter are task-specific languages that
allow developers to express higher level semantics without worrying about
low level details. Our language is similar as it allows application
developers to specify the remote execution capabilities of their
applications at a higher level without needing to worry about low level
system integration details. However, our approach is focused towards remote
execution systems for mobile computing.
9 Conclusion
In this paper, we introduced the concept of tactics. This abstraction
captures application-specific knowledge relevant to remote execution with
minimal exposure of the implementation details. This allows the use of
computationally intensive applications on handheld and wearable devices even
in environments with changing resources. We showed how tactics can be used
to build a remote execution system. We also provided experimental results
from three applications to confirm the benefits of using tactics.
Currently, we are looking at methods of resource allocation to ensure that
servers are used fairly by Chroma clients. We are also looking at various
service discovery mechanisms to allow us to easily discover the presence of
these servers. Finally, we are developing better software engineering
methods to ease application development.
10 Acknowledgments
This research was supported by the National Science Foundation
(NSF) under contracts CCR-9901696 and ANI-0081396, the Defense Advanced
Projects Research Agency (DARPA) and the U.S. Navy (USN) under contract
N660019928918. Rajesh Balan was additionally supported by a USENIX student
research grant. We would like to thank Hewlett-Packard for donating the
notebooks to be used as the servers and Compaq for donating handhelds used
as clients. Finally, we would like to thank Mukesh Agrawal, Jan Harkes, Urs
Hengartner, Ningning Hu, Glenn Judd, Mahim Mishra, Bradley Schmerl, Joao
Sousa, the anonymous MobiSys reviewers and our shephard Marvin Theimer for
their many insightful comments and suggestions related to this work. The
views and conclusions contained in this document are those of the authors
and should not be interpreted as representing the official policies, either
expressed or implied, of NSF, DARPA, USN, HP, USENIX, Compaq, or the U.S.
government.
References
- [1]
-
Amiri, K., Petrou, D., Ganger, G., and Gibson, G.
Dynamic function placement for data-intensive cluster computing.
Proceedings of the USENIX 2000 Annual Technical Conference, San
Diego, CA, June 2000.
- [2]
-
Balan, R. K., Sousa, J. P., and Satyanarayanan, M.
Meeting the software engineering challenges of adaptive mobile
applications.
Technical Report CMU-CS-03-111, Carnegie Mellon University,
Pittsburgh, Pennsylvania, Feb. 2003.
- [3]
-
Basney, J. and Livny, M.
Improving goodput by co-scheduling CPU and network capacity.
Intl. Journal of High Performance Computing Applications,
13(3), Fall 1999.
- [4]
-
Bentley, J.
Little languages.
Communications of the ACM, 29(8):711-21, 1986.
- [5]
-
D. Eckhardt, P. S.
Measurement and analysis of the error characteristics of an
in-building wireless network.
Proceeding of ACM SIGCOMM, pages 243-254, Stanford,
California, October 1996.
- [6]
-
Forman, G. and Zahorjan, J.
Survey: The challenges of mobile computing.
IEEE Computer, 27(4):38-47, April 1994.
- [7]
-
Frederking, R. and Brown, R. D.
The Pangloss-Lite machine translation system.
Expanding MT Horizons: Proceedings of the Second Conference of
the Association for Machine Translation in the Americas, pages 268-272,
Montreal, Canada, 1996.
- [8]
-
Hunt, G. C. and Scott, M. L.
The Coign automatic distributed partitioning system.
Proceedings of the 3rd Symposium on Operating System Design and
Implemetation (OSDI), pages 187-200, New Orleans, LA, Feb. 1999.
- [9]
-
Jul, E., Levy, H., Hutchinson, N., and Black, A.
Fine-grained mobility in the emerald system.
Proceedings of the 11th ACM Symposium on Operating Systems
Principles (SOSP), volume 21, pages 105-106, 1987.
- [10]
-
Katz, R. H.
Adaptation and mobility in wireless information systems.
IEEE Personal Communications, 1(1):611-17, 1994.
- [11]
-
Lee, C., Lehoczky, J., Siewiorek, D., Rajkumar, R., and Hansen, J.
A scalable solution to the multi-resource QoS problem.
Proceedings of the 20th IEEE Real-Time Systems Symposium (RTSS
'99), pages 315-326, Phoenix, AZ, Dec. 1999.
- [12]
-
Martin, J.
Fourth-Generation Languages, volume 1: Principles.
Prentice-Hall, 1985.
- [13]
-
Milojicic, D. S., Douglis, F., Paindaveine, Y., Wheeler, R., and Zhou, S.
Process migration.
ACM Computing Surveys, 32(3):241-299, 2000.
- [14]
-
Narayanan, D. and Satyanarayan, M.
Predictive resource management for wearable computing.
Proceedings of the 1st International Conference on Mobile
Systems, Applications, and Services (MobiSys), San Francisco, CA, May 2003.
- [15]
-
Noble, B. D., Satyanarayanan, M., Narayanan, D., Tilton, J. E., Flinn, J., and
Walker, K. R.
Agile application-aware adaptation for mobility.
Proceedings of the 16th ACM Symposium on Operating Systems
Principles (SOSP), pages 276-287, Saint-Malo, France, October 1997.
- [16]
-
Raman, B. and Katz, R.
An architecture for highly available wide-area service composition.
Computer Communications Journal, special issue on `Recent
Advances in Communication Networking', May 2003.
- [17]
-
Satyanarayanan, M.
Fundamental challenges in mobile computing.
Proceedings of the Fifteenth ACM Symposium on Principles of
Distributed Computing, Philadelphia, PA, May 1996.
- [18]
-
Satyanarayanan, M.
Pervasive computing: Vision and challenges.
IEEE Personal Communications, 8(4):10-17, Aug. 2001.
- [19]
-
Satyanarayanan, M.
The evolution of coda.
ACM Transactions on Computer Systems (TOCS), 20(2):85-124,
2002.
- [20]
-
Schneiderman, H. and Kanade, T.
A statistical approach to 3d object detection applied to faces and
cars.
Proceedings of the IEEE Computer Society Conference on Computer
Vision and Pattern Recognition (CVPR), pages 746-751, Hilton Head Island,
South Carolina, June 2000.
- [21]
-
Sun Microsystems Inc.
Remote Method Invocation Specification.
- [22]
-
Waibel, A.
Interactive translation of conversational speech.
IEEE Computer, 29(7):41-48, July 1996.
- [23]
-
Weiser, M.
The computer for the twenty-first century.
Scientific American, pages 94-101, September 1991.
File translated from
TEX
by
TTH,
version 3.33.
On 1 Mar 2003, 17:08.
|
