| Pp. 135–146 of the Proceedings |  |
Richard J Moore
- richardj_moore@uk.ibm.com
IBM Corporation, Linux Technology Centre
Dprobes allows the insertion of fully automated breakpoints or probepoints, anywhere in the system and user space. Probepoints are global by definition, that is they are defined relative to a module and not to a storage address. Each probepoint has an associated set of probe instructions that are interpreted when the probe fires. These instructions allow memory and CPU registers to be examined and altered using conditional logic. When the probe program terminates an external debugging facility may be optionally triggered - should it register for this purpose. For example:
In creating Dynamic
Probes, we were challenged with the conflicts between:
We alleviated these
problems by developing a generalised interface for kernel modifications
to use allowing them to exist as dynamically loadable kernel modules.
This interface: The
Generalised
Kernel Hooks Interface (GKHI) is described in the second part of this
paper.
Or indeed do nothing!
The fact that we had conditional logic gave us a very powerful tool for
monitoring a piece of code until conditions presented themselves that required
user action. We were also able to accumulate information in the form of
local variables, which could be used to retain data from one invocation
of a tracepoint to another and be later accessed and display by a command
utility.
The original OS/2 [2] facility suffered from three design limitations:
Component Overview
Dprobes comprises the following major components whose interrelationships are shown in the figure below:
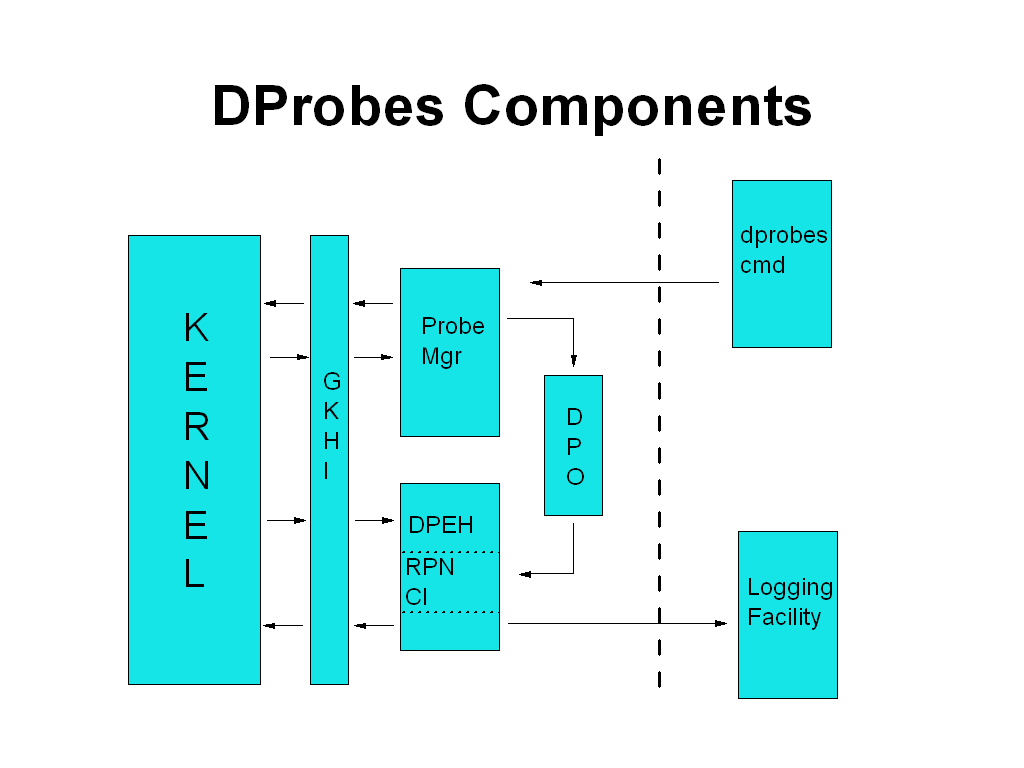
The Probe Program Command Interpreter executes commands in the probe program lodged in the dynamic probe object. Should an exception occur then interpretation is quietly terminated with an error indication in the temporary log buffer, which is the temporary piece of storage allocated per processor. This buffer is made available to any external facilities that might register to be notified when the Interpreter exits via the exit RPN command. The usable size of the temporary log buffer is determined per probe object, with a maximum size of 1Kb, which will become configurable.
The user communicates with the kernel components by means of the dprobes command line utility, which supports the following major functions:
This reads a dynamic probe definition file (DPDF), which contains among other things, the module name to which the probe definitions apply, the local variable array size, and for each probe within the module its probe definition. The probe definition comprises the probe location, which may be expressed as a symbolic expression, a user identifier for the probe - a major-minor code pair and the text of the associated RPN probe program. The insert function parses the DPDF and passes a condensed form of this to the probe manager to be saved as a dynamic probe object.
Existing probe definitions
for the same target module may be optionally replaced or merged with the
new definitions.
This will remove all probes
from a module. Optionally a subset of the probes may be removed.
This will extract local and
global variables for one or more probe definitions. Optionally it may be
used to reset the values to zero.
This will display the state
of registered probes.
This builds a pre-built
probe definition file (PPDF), which is essentially a file version of
the package built by the Insert function. The value in providing
this function is that probe definitions can be pre-built from a makefile
and later inserted using the dprobes command's insert function.
This would allow a module to be installed along with its PPDF so that is
debug-ready, without being a special built with debugging code present.
Pre-building is made possible because the probe location may be expressed
symbolically using symbols from the module's symbol table.
The Breakpoint Mechanism
At the heart of dynamic probes lies the probepoint which is a breakpoint - the same as that implemented by a debugger - with a few implementation differences:
Because Dprobes is in one sense an automated kernel debugger we do not wish a breakpoint to interrupt execution temporarily. Instead it gives control to the Dprobes Event Handler (DPEH), which under normal circumstances will return control to the program without user intervention. Because the breakpoint is automated and does not really break execution, we refer to it as a probepoint.
As is usual for breakpoints we intercept code before the probed instruction executes. This might seem like an otiose statement given that the beginning of one instruction is the end of another - but not so when the mechanism for implementing the breakpoint is examined. There are in general two mechanisms by which to implement a breakpoint:
The watchpoint is a hardware assisted mechanism for interrupting execution in order to give control to some monitoring application, such as the DPEH. Unfortunately watchpoint implementation is not consistent across all processors. On Intel[5] 32-bit architecture there are four debugging registers provided for watchpoint implementation, a severe limitation in itself. Intel[5] watchpoints interrupt on instruction fetch. In contrast S/390[4] watchpoints operate over a continuous range and interrupt on completion or partial completion of the execution of an instruction.
Since there's no easy abstraction of watchpoints across processor platforms we use the Instruction Replacement technique.
The DPEH is discussed more fully later however it does play an essential role in the breakpoint mechanism. Its main components are:
On entry to the DPEH,
application, system and processor state can be examined as one would do
from a kernel debugger but by means of commands in the associated RPN Probe
Program. This requires that the DPEH operates at a supervisor level of
privilege. Therefore to enter the DPEH from any privilege level we require
the breakpoint to be implemented using an instruction that will cause an
interrupt. Under Intel[5] the INT3 instruction
suffices and is designed for this purpose. Under S/390[4]
the SVC255 instruction provides an equivalent function. Each processor
platform that distinguishes privilege levels will offer an instruction
equivalent to these that will allow controlled access into a supervisor
privilege level of execution.
The second stage of the DPEH is to single-step the original instruction followed by a commit phase. (Committal applies to the temporary log buffer, when passing this to an external facility, for example a tracing facility or the default Syslog facility). Two questions arise:
Single-step allows the DPEH to execute the original instruction in its intended context and gain control on completion.
In the current implementation under Intel[5] 32-bit architecture (IA32), the single-step phase of the DPEH comprises restoring the original instruction, returning from the DPEH using the IRET instruction with the TRACE flag set in the EFLAGS register. If the single-stepped instruction completes without interruption or exception control is returned to the DPEH via the single-step system exception handler and logged information is committed. The INT3 is restored and the DPEH returns to the probed program.
If the single-stepped original instruction terminates with an exception (other than single-step), the log buffer is discarded and the INT3 is restored. This requires that the DPEH be given control from all system exception handlers. (In the current implementation under IA32 we have disallowed probes on INTn instructions since these always end in an exception and would require an unnecessary intrusion into the system exception handlers for exceptions 0x20 - 0xff).
Implementation details of
the probepoint, particularly the single-step are clearly processor dependent.
However, mechanisms for single-stepping instructions under program control
exist on all modern processor architectures. The single-step mechanism
is therefore customised per architecture. To ease porting to other platforms,
the single-step is made modular and therefore easily replaceable. The single-step
implementation under Intel[5] more or less forces
us to do this with interrupts disabled, since there is no easy way to save
state across the single-step should we re-enter the breakpoint exception
handler, consequently we single-step with interrupts disabled and make
appropriate adjustments for instructions such as PUSHF, CLI
and STI. In addition we take steps to avoid recursion due to probepoints
being placed in the path of the DPEH. We do this in two ways:
The Instruction Replacement
form of breakpoint has two undesirable side-affects, which may or may not
be troublesome, depending on architecture:
In order to single-step the original instruction in context, we temporarily replace the breakpoint instruction with the original instruction. This opens a window of opportunity for a probepoint to be missed if the same piece of probed code is executed on another processor in close succession. We can avoid this by forcing processor serialisation during the single-step. However, that can badly affect performance, and so, is left as an option for the user to deploy if needed. In practice this has not been a problem because Dprobes has been used to find bugs in code that is already serialised or races against other code that jointly accesses common data.
The other side-affect is very much architecture dependent. When dynamically changing instructions, some architectures will require additional actions to be carried out in order to guarantee consistent results. For example, not all architectures fetch whole instructions as an atomic entity nor do they do this in address order. Furthermore the problem is compounded when code is stored in read-only memory and an update has to be done using an aliased read/write virtual address. Usually there are ways around these problems; one needs to read very carefully the processor documentation regarding instruction caching, pipe-lining and speculative execution.
The instruction-replacement form of breakpoint and single-step requires that the breakpoint be re-instated on completion of the single-step.
The last three phases were discussed under the previous section - The Breakpoint Mechanism. We now look in detail at the first phase - The Probe Command Interpreter.Execute Probe Program commands Single-step original instruction Commit probe buffer Return to probed program.
When a probe is registered with the Dprobes Manager an associated probe program is lodged with he Dprobes Manager. This program defines the actions that will be carried out when the probe is executed. The probe program language is of the Reverse Polish Notation (RPN) family of languages. Therefore, an implicit stack is associated with the probe program for temporarily storing operands and results of RPN commands.
The RPN family of languages are implemented using a stack on which command operands are pushed. When a command is executed the operands are popped from the RPN stack and the result pushed on to the stack. Many implementation use a circular array of fixed width for the RPN stack and maintain a special pointer that locates the Top of Stack (TOS), which is precisely the implementation within Dprobes. Two special (families of) commands are provided to for the program to access the stack:
PUSH
This rotates the stack forward and copies data to the TOS.
POP
This rotates the stack backward, but does not update tack contents.

Dprobes implements a 32-element circular RPN stack of width equal to the bus width of the processor. In the case of Intel[5] 32-bit architecture each RPN stack element is 32-bits.
There are three other storage areas provided for use by the RPN program:
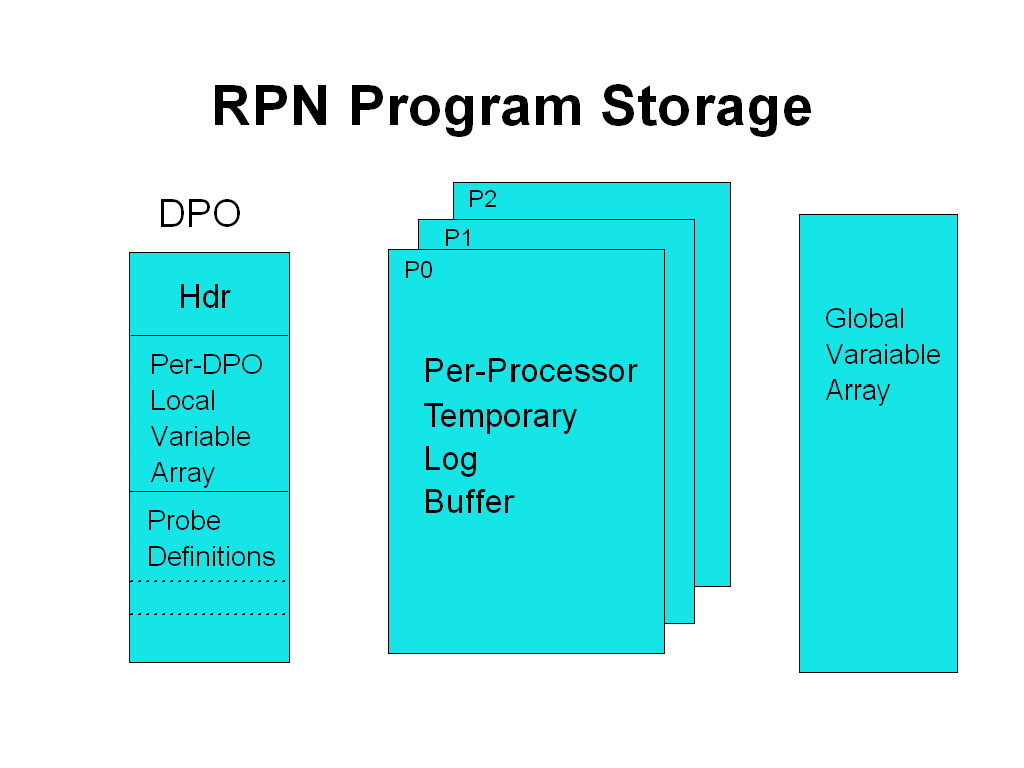
The Temporary LogBuffer is used to accumulate data during the execution of the RPN program. Depending on how the program terminates, will be passed on to an external debugging facility, for example, Syslog or Trace. The temporary log buffer contents persists only during the execution of the probe program. Contents are discarded if the program ends abnormally or is deliberately aborted. One temporary log buffer is defined per processor, the usable size of which is defined per module, when probes are registered.
The Local Variable Storage Array is provided per probed module and shared among all probe programs that are operative for a probed module. Each array element, or local variable, is retained across invocations of the RPN program and may be used to share data between probe programs for a given module. Local Variables can be extracted, displayed and reset by the dprobes command utility. The size of the local variable array is defined when probes for a module are registered.
Global Variable Storage is similar to Local variable Storage, but is common to all probed modules.
The DPEH RPN Command Interpreter implements the following classes of commands:
Execution and Sequencing
Group.
This group includes
conditional jumps, loop, subroutine call, exit control and probe control.
Logging Group.
This group includes
commands that update the temporary log buffer.
Local and Global
Variable Group.
This includes commands
that perform allocation of global variables and commands that read and
write to local and global variables.
Arithmetic/Logic
Group.
This includes commands
that operate with the RPN stack. They include addition, multiplication,
subtraction, bit masking, bit shifting and rotation.
Address Verification.
This in a small group
of two commands that will test the validity of a memory addresses. There
are provided because the interpreter runs with interrupts disabled and
cannot page-in swapped or discarded memory - see Data Group below.
Stack Manipulation.
A single POP command
used to rotate the RPN stack without data manipulation. Commands that manipulate
data on the RPN stack are included in the groups relating to the data origins
and destinations.
Register Group.
This include commands
to push processor registers onto the RPN stack and commands to pop registers
from the RPN stack. Both the current processor registers and the current
user context registers may be accessed.
Data Group.
This includes commands
to push and pop data in memory to and from the RPN stack. A subset of this
group is the system variable subgroup which will access key system data
values, for example current process ID and address of current task_strict.
Because the DPEH runs with interrupts disabled, exceptions caused by data
group commands are soft-failed by the interpreter by halting interpretation
and storing a failure code in the temporary log buffer.
IO Group.
This include commands
to push and pop data from the IO address space (not implemented on platforms
that do not support an IO address space).
Example Probe Programs
Example 1 - fork and kill:
name = bzImage
modtype = kernel
major = 1
jmpmax = 32
logmax = 100
dfltexit=1
vars = 2offset = kill_proc
opcode = 0x55
minor = 1
pass_count = 0
max_hits = 1000
inc lv,0
push d,16
push r, esp
log mrf
exitoffset = do_fork
opcode = 0x55
minor = 2
pass_count = 0
max_hits = 1000
inc lv,1
push d,16
push r, esp
log mrf
exit
The example above
shows an RPN probe that will create a Syslog entry ever time a process
forks and is killed. It will accumulate the number of forks and kills in
local variables 1 and 0. These variable may be displayed at any time using:
dprobes -g -a
from the command line. Whenever kill_proc or do_fork is entered, the probe programs above will write to the temporary log 16 bytes of current stack data, which on exit will be written to Syslog using printk.
Example 2 - malloc:
name = "/lib/libc.so.6"
modtype = user
major = 1
jmpmax = 32
logmax = 100
dfltexit=0offset = __malloc
opcode = 0x55
minor = 1
pass_count = 0
push r,esp // push the stack pointer
push d,4
add // TOS -> first parm to malloc (size)
push d,0x20000000 // size 0x20000000
sub // compare
jz take_dump // if equal, take core dump
exit // else exit without further ado
take_dump: exit 3
In this example
we place a probe on entry to the malloc routine of libc.
We look for the instance where malloc is called with a size value of 0x20000000
and when found we force a core dump.
The following examples have been taken from the OS/2 [2] platform from which Dprobes was developed. I'll summarise two contrasting examples: the first an operating system bug, the second an application space bug.
Example: A deep-rooted operating system bug.
We had a situation where we found the file-system was page-faulting unexpectedly. What was very odd about this situation was that the page-fault was occurring on a page that should have been locked in memory. We could never reproduce this problem in the lab, it only happened on a customer's server, once a day at peak load.
The first hypothesis was that the file system had a bug and had accidentally unlocked a locked page. So we created a PPDF that contained probe definitions of the file system's locking and unlocking subroutines. We sent this to the customer and asked him to insert the probes. When the system next crashed, the customer sent the crash dump and the log created by dprobes.
The dump and dprobes log showed only a lock request for the faulting page, however the page status could be seen from the dump to be unlocked.
The second hypothesis was to assume that another kernel module was unlocking the page. So we sent the customer a PPDF that logged all calls to the kernel's lock and unlock routines. Once again the log showed that no-one had unlocked the faulting page. However we did notice that every time the locked page faulted a great deal of process switching had taken place. We began to suspect that there might be a page-manager problem in the kernel. To see whether something odd was happening we placed probes inside the process context switching routine.
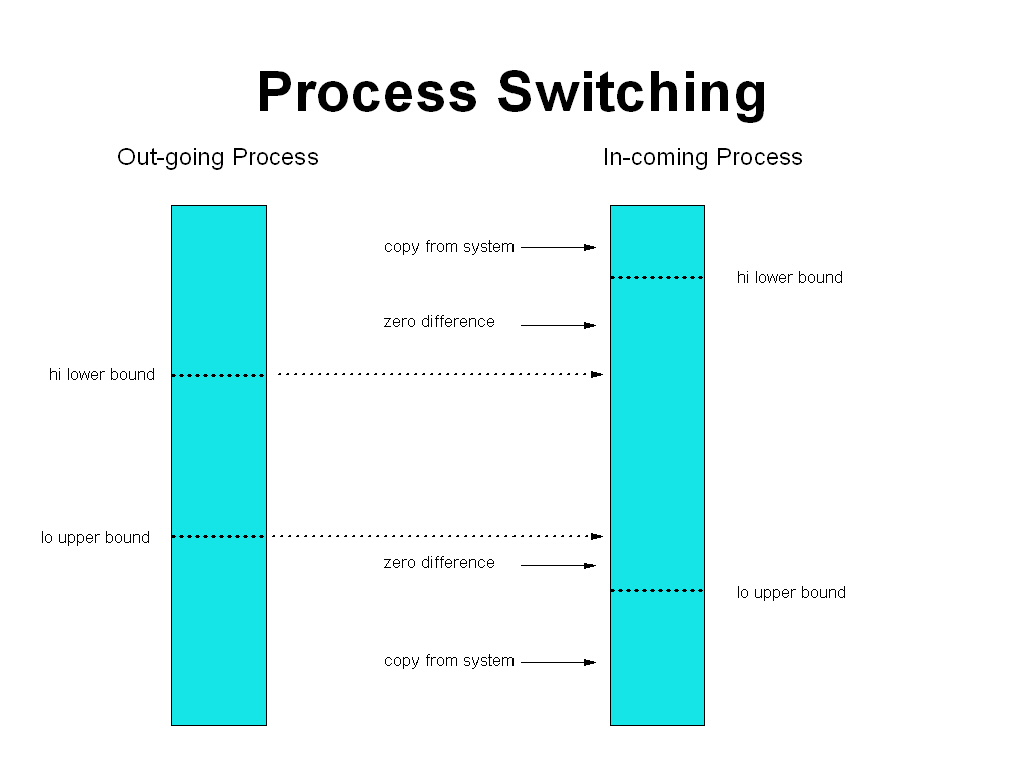
Code inside the context switcher is very difficult to debug, We are in no defined process state. Page Tables and system state variables in an inconsistent state with respect to each other. But because the DPEH was designed to operate in the most hostile conditions we could use Dprobes to find out what was happening. Inside the Context Switcher we placed two probes: one before page data was saved. This probe logged the out-going processes page tables. The other probe was placed near the exit of the context switcher and logged the in-coming process' page tables.
On re-creating the problem we cold see that the out-going process' page tables showed the faulting page present and when the process was next run the faulting page table entry was zero. But the copy of the page data, maintained by the system while the process was not being run , still had the page table entry intact (we could see this from the dump). There had to be a bug in the context switcher - despite having been written some 15 years ago and not had a defect in all that time.
It was time to examine
the code: someone had introduced a performance enhancement to avoid double-updating
of page tables. This enhancement had a bug which caused valid page tables
entries to be zeroed when the outgoing process' upper bound for low memory
over-lapped the in-coming process' lower bound for high. See the picture
below for clarification.
This situation worked until the following occurred:
Example: who
sent the parcel-bomb?
This is an application-space example. The messaging facility within OS/2 [2] has an asynchronous function: WinPostMsg. When a message is posted the application's message thread is posted - made ready to run. When it runs it will find one or messages on its message queue along with optional parameters. A posted message is asynchronous. By the time the receiver wakes, the poster could have even terminated. And there's no way of knowing who it was.
We had a situation where a message was being posted to an application but every now and then a message was posted with an erroneous parameter that caused the receiver to trap. The question is who sent it?
We found this out simply by putting a probe on the entry to the WinPostMsg. The probe contained conditional logic to examine the message ID and the parameter. When the ID and Parameter matched the values that caused the receiver to trap we invoked a crash dump. The dump was taken in the context of the poster and allowed us to see who it was and where in their code it was happening.
Conclusions:
Both these examples could have been solved with other debugging tools, but not easily so. Both would have needed an ability to place global breakpoints at certain code locations and at the same time exercise conditional logic. Potentially a kernel debugger can do this. However, the breakpoints deployed require performance to be maintained, furthermore kernel debuggers tend to assume a breakpoint really means break - so are designed to perform serialisation function to allow direct user communication. The DPEH, on the other hand, is designed with minimal serialisation dependencies and no user interaction. It can therefore maintain system performance with complex conditional breakpoints applied.
Other uses of Dprobes
has been to provide a high-speed conditional breakpoint facility which
gives control to a kernel debugger when the correct situation presents
itself.
Generalised Kernel Hooks Interface
Like other modifications to the base operating system, there are problems with having to manage large modifications, for example:
A particular problem that needs to be overcome is how to define such an interface. We cannot simply code within the kernel, calls to external modules because we would not be able to resolve those calls at kernel load time. To overcome this , we define hooks within the kernel.
A hook is a
small piece of code inserted into the kernel source, actually a one-line
change because we define the hook using a C macro, an example of which
is shown below:
#define GKHOOK_2VAR_RO(h, p0, p1) asm volatile (".global GKHook"h";
.global GKHook"h"_ret;
.global GKHook"h"_bp;
/* replace with nop;nop;nop; to activate */
GKHook"h": jmp GKHook"h"_bp;
leal %1,%%eax
push %%eax;
leal %0,%%eax;
push %%eax;
push $2;
/* replace with jmp GKHook"h"_dsp when active*/
Nop;nop;nop;nop;nop
GKHook"h"_ret: add $12,%%esp;
GKHook"h"_bp:;"
::"m"(p0),"m"(p1):"%eax")
The hook begins
with a jump to the end of the hook, in its dormant state. The body of the
hook contains space for instructions to be added when the hook becomes
active. When a hook activates, the body of the hook is populated with instructions
to call the Generalised Kernel Hook Interface (GKHI) module
at the hook's dispatcher entry point and the initial jump instruction is
nullified by replacing it with NOP instructions. The GKHI is responsible
for activating hooks and makes these modifications when another kernel
module calls the GKHI to request that a hook be enabled for its use.
This implementation requires that a minimal change be made to the kernel: a hook be identified at each location in the kernel source where external modules may wish to gain control. But, it allows multiple modules to access the same hook without further modification to the kernel as we shall see when the GKHI is described in more detail.
The GKHI provides four
interfaces for kernel modules to call in order to access or relinquish
access to one or more kernel hooks.
GHK_register:
This is used to identify a location (a hook exit) in a kernel module that wishes to gain control at a given hook. The caller passes a hook registration record to the GKHI which contains the hook exit address and a flag indicating the desired dispatching priority which may be:
A hook exit will not be dispatched until it is armed.First in list of exists for this hook Last in list of exits for this hook Only exit for this hook Unspecified.
GHK_arm:
This allows one or
more hook exits to be made dispatchable. The kernel module calling this
interface will pass a list of chained hook registration records that are
to be armed. If for any of the hooks referenced this is the first instance
of the hook being used the GKHI will activate the hook. So, it is not until
a module needs to use a hook will the additional code path be imposed on
the kernel at the hook location. Arming is carried out in an atomic fashion,
under SMP this requires other processors to be temporarily suspended from
performing useful work. The impact, however, is minimal, since arming
amounts to activating the hook if not already active and updating status
maintained within the hook registration record for each hook exit being
armed. This is a CPU-bound operation on resident memory.
GKH_disarm:
This has the opposite
affect of GKH_arm: a list of hook registration records is passed to the
GKHI, which will mark each one as no longer dispatchable. If any one of
these is the last to disarm for a given hook then the GKHI will make the
hook inactive by restoring the original bypass jump instruction. Disarming
is carried out atomically.
GHK_deregister:
This has the opposite affect of GKH_register where each hook exit in the list of exits requiring de-registration will be removed from knowledge of the GKHI.
When a hook is active and exits are armed, the dispatcher routine will be called when the hook executes. This routine is responsible for calling each of the armed hook exits for that hook, in priority order. If any exit returns a non-zero result no further exits are dispatched on that invocation of the dispatcher. As part of the registration of a hook exit, entry conditions may be specified:
In addition, the exit may adjust the status flag in its registration record so to disarm itself. This together with the ability to specify entry conditions gives the exit the an opportunity to be dispatched and disarmed as an atomic entity.All CPUs are temporarily stopped Interrupts are disabled
Part of the definition of a hook is whether it will pass any parameters to the hook exit and in addition whether those parameters will be modifiable. In the example given above the hook macro defines two read-only parameters. But in addition to passing these parameters we also pass a count of the number of parameters. In this was a hook may be modified and have additional parameters added. And the exit will know whether it is compatible with the current hook definition. (By convention we add parameters to the end of the list).
GKHI may be loaded
at any time using insmod, however no hooks can be activated until
the GKHI is loaded. It is possible for kernel modules to define hooks within
themselves, but using the regime described so far would require that the
kernel module containing the hook be loaded before the GKHI. To achieve
even greater flexibility, the GKHI defines two further interfaces:
GKH_identify:
This interface is called
to notify the GKHI of a new hook that has become available since it initialised.
Obviously exits cannot register for the new hook until it has identified
itself.
GKH_delete:
This interface is called
to notify the GKHI the a hook is not longer eligible for registration.
Where to obtain Dprobes:
Dprobes, including the GKHI, is available from IBM's Linux Technology Centre's web page at:
https://oss.software.ibm.com/developerworks/opensource/linux/projects/dprobes
The development team comprises:
Richard J Moore (Dprobes Project Lead) - richardj_moore@uk.ibm.com
Bharata B Rao - rbharata@in.ibm.com
Subodh Soni - ssubodh@in.ibm.com
Maneesh Soni - smaneesh@in.ibm.com
Vamsi Krishna Sangavarapu - r1vamsi@in.ibm.com
Suparna Bhattacharya - bsuparna@in.ibm.com
Notes and references:
[1] https://oss.software.ibm.com/developerworks/opensource/linux/projects/dprobes
[2] OS/2 is a trademark of International Business Machines Corporation.
[3] The dynamic probe object is a complex set of structures, the principle being dp_module_struct. Each of these is defined in dprobes.h
[4] S/390 is a trademark of International Business Machines Corporation.
[5] Intel is a trademark of the Intel Corporation.
|
This paper was originally published in the
Proceedings of the 4th Annual Linux Showcase and Conference, Atlanta,
October 10-14, 2000, Atlanta, Georgia, USA
Last changed: 8 Sept. 2000 bleu |
|