|
||||||||||||||
Shirako's leasing architecture derives from the SHARP framework for secure resource peering and distributed resource allocation [13]. The participants in the leasing protocols are long-lived software entities (actors) that interact over a network to manage resources.
These actors may represent different trust domains and identities, and may enter into various trust relationships or contracts with other actors.
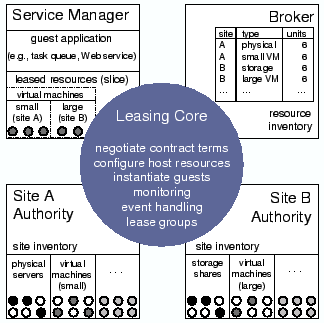
2.1 Cluster SitesOne goal of this paper is to show how dynamic, brokered leasing is a foundation for resource sharing in networked clusters. For this purpose we introduce a cluster site manager to serve as a running example. The system is an implementation of Cluster-On-Demand (COD [7]), rearchitected as an authority-side Shirako plugin. The COD site authority exports a service to allocate and configure virtual clusters from a shared server cluster. Each virtual cluster comprises a dynamic set of nodes and associated resources assigned to some guest at the site. COD provides basic services for booting and imaging, naming and addressing, and binding storage volumes and user accounts on a per-guest basis. In our experiments the leased virtual clusters have an assurance of performance isolation: the nodes are either physical servers or Xen [2] virtual machines with assigned shares of node resources. Figure 1 depicts an example of a guest service manager leasing a distributed cluster from two COD sites. The site authorities control their resources and configure the virtual clusters, in this case by instantiating nodes running a guest-selected image. The service manager deploys and monitors the guest environment on the nodes. The guest in this example may be a distributed service or application, or a networked environment that further subdivides the resources assigned to it, e.g., a cross-instititutional grid or content distribution network. The COD project began in 2001 as an outgrowth of our work on dynamic resource provisioning in hosting centers [6]. Previous work [7] describes an earlier COD prototype, which had an ad hoc leasing model with built-in resource dependencies, a weak separation of policy and mechanism, and no ability to delegate or extend provisioning policy or to coordinate resource usage across federated sites. Our experience with COD led us to pursue a more general lease abstraction with distributed, accountable control in SHARP [13], which was initially prototyped for PlanetLab [4]. We believe that dynamic leasing is a useful basis to coordinate resource sharing for other systems that create distributed virtual execution environments from networked virtual machines [9,17,18,19,20,25,26,28].
2.2 Resource LeasesThe resources leased to a guest may span multiple sites and may include a diversity of resource types in differing quantities. Each SHARP resource has a type with associated attributes that characterize the function and power of instances or units of that type. Resource units with the same type at a site are presumed to be interchangeable. Each lease binds a set of resource units from a site (a resource set) to a guest for some time interval (term). A lease is a contract between a site and a service manager: the site makes the resources available to the guest identity for the duration of the lease term, and the guest assumes responsibility for any use of the resources by its identity. In our current implementation each lease represents some number of units of resources of a single type. Resource attributes define the performance and predictability that a lease holder can expect from the resources. Our intent is that the resource attributes quantify capability in an application-independent way. For example, a lease could represent a reservation for a block of machines with specified processor and memory attributes (clock speed etc.), or a storage partition represented by attributes such as capacity, spindle count, seek time, and transfer speed. Alternatively, the resource attributes could specify a weak assurance, such as a best-effort service contract or probabilistically overbooked shares.
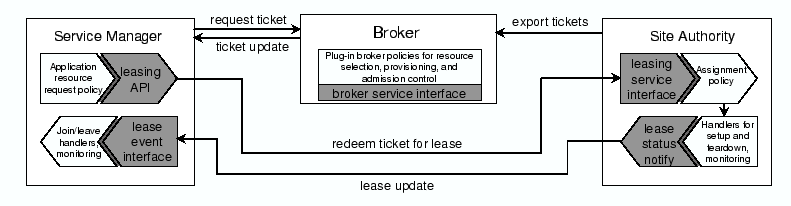
2.3 BrokersGuests with diverse needs may wish to acquire and manage multiple leases in a coordinated way. In particular, a guest may choose to aggregate resources from multiple sites for geographic dispersion or to select preferred suppliers in a competitive market. Brokers play a key role because they can coordinate resource allocation across sites. SHARP brokers are responsible for provisioning: they determine how much of each resource type each guest will receive, and when, and where. The sites control how much of their inventory is offered for leasing, and by which brokers, and when. The site authorities also control the assignment of specific resource units at the site to satisfy requests approved by the brokers. This decoupling balances global coordination (in the brokers) with local autonomy (in the site authorities). Figure 2 depicts a broker's role as an intermediary to arbitrate resource requests. The broker approves a request for resources by issuing a ticket that is redeemable for a lease at some authority, subject to certain checks at the authority. The ticket specifies the resource type and the number of units granted, and the interval over which the ticket is valid (the term). Sites issue tickets for their resources to the brokers; the broker arbitration policy may subdivide any valid ticket held by the broker. All SHARP exchanges are digitally signed, and the broker endorses the public keys of the service manager and site authority. Previous work presents the SHARP delegation and security model in more detail, and mechanisms for accountable resource contracts [13].
2.4 System GoalsShirako is a toolkit for constructing service managers, brokers, and authorities, based on a common, extensible leasing core. A key design principle is to factor out any dependencies on resources, applications, or resource management policies from the core. This decoupling serves several goals:
Note that Shirako has no globally trusted core; rather, one contribution of the architecture is a clear factoring of powers and responsibilities across a dynamic collection of participating actors, and across pluggable policy modules and resource drivers within the actor implementations.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Our goal was to build a common toolkit for all actors that is understandable and maintainable by one person. Table 2 shows the number of lines of Java code (semicolon lines) in the major system components of our prototype. In addition, there is a smaller body of code, definitions, and stubs to instantiate groups of Shirako actors from XML descriptors, encode and decode actor exchanges using SOAP messaging, and sign and validate SHARP-compliant exchanges. Shirako also includes a few dozen Ant scripts, averaging about 40 lines each, and other supporting scripts. These scripts configure the various resources and applications that we have experimented with, including those described in Section 5. Finally, the system includes a basic Web interface for Shirako/COD actors; it is implemented in about 2400 lines of Velocity scripting code that invokes Java methods directly.
The prototype makes use of several other open-source components. It uses Java-based tools to interact with resources when possible, in part because Java exception handling is a basis for error detection, reporting, attribution, and logging of configuration actions. Ant tasks and the Ant interpreter are written in Java, so the COD resource drivers execute configuration scripts by invoking the Ant interpreter directly within the same JVM. The event handlers often connect to nodes using key-based logins through jsch, a Java secure channel interface (SSH2). Actors optionally use jldap to interface to external LDAP repositories for recovery. COD employs several open-source components for network management based on LDAP directory servers (RFC 2307 schema standard) as described below.
The Shirako core must accommodate long-running asynchronous operations on lease objects. For example, the brokers may delay or batch requests arbitrarily, and the setup and join event handlers may take seconds, minutes, or hours to configure resources or integrate them into a guest environment. A key design choice was to structure the core as a non-blocking event-based state machine from the outset, rather than representing the state of pending operations on the stacks of threads, e.g., blocked in RPC calls. The lease state represents any pending action until a completion event triggers a state transition. Each of the three actor roles has a separate state machine.
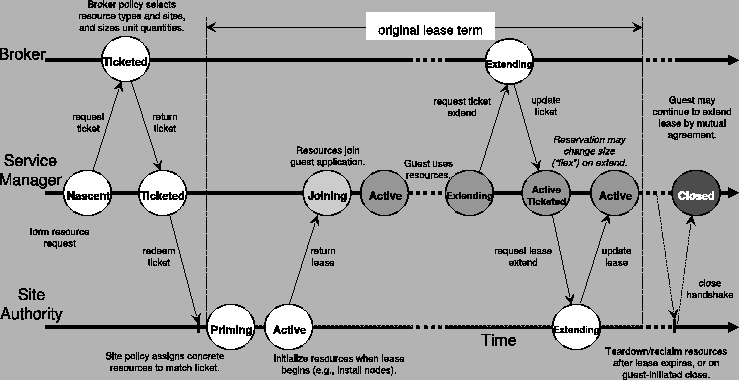
Figure 3 illustrates typical state transitions for a resource lease through time. The state for a brokered lease spans three interacting state machines, one in each of the three principal actors involved in the lease: the service manager that requests the resources, the broker that provisions them, and the authority that owns and assigns them. Thus the complete state space for a lease is the cross-product of the state spaces for the actor state machines. The state combinations total about 360, of which about 30 are legal and reachable.
The lease state machines govern all functions of the core leasing package. State transitions in each actor are initiated by arriving requests or lease/ticket updates, and by events such as the passage of time or changes in resource status. Actions associated with each transition may invoke a plugin, commit modified lease state and properties to an external repository, and/or generate a message to another actor. The service manager state machine is the most complex because the brokering architecture requires it to maintain ticket status and lease status independently. For example, the ActiveTicketed state means that the lease is active and has obtained a ticket to renew, but it has not yet redeemed the ticket to complete the lease extension. The broker and authority state machines are independent; in fact, the authority and broker interact only when resource rights are initially delegated to the broker.
The concurrency architecture promotes a clean separation of the leasing core from resource-specific code. The resource handlers--setup/teardown, join/leave, and status probe calls--do not hold locks on the state machines or update lease states directly. This constraint leaves them free to manage their own concurrency, e.g., by using blocking threads internally. For example, the COD node drivers start a thread to execute a designated target in an Ant script. In general, state machine threads block only when writing lease state to a repository after transitions, so servers need only a small number of threads to provide sufficient concurrency.
 |
Some state transitions are triggered by timer events, since leases activate and expire at specified times. For instance, a service manager may schedule to shutdown a service on a resource before the end of the lease. Because of the importance of time in the lease management, actor clocks should be loosely synchronized using a time service such as NTP. While the state machines are robust to timing errors, unsynchronized clocks can lead to anomalies from the perspective of one or more actors: requests for leases at a given start time may be rejected because they arrive too late, or they may activate later than expected, or expire earlier than expected. One drawback of leases is that managers may ``cheat'' by manipulating their clocks; accountable clock synchronization is an open problem.
When control of a resource passes from one lease to another, we charge setup time to the controlling lease, and teardown time to the successor. Each holder is compensated fairly for the charge because it does not pay its own teardown costs, and teardown delays are bounded. This design choice greatly simplifies policy: brokers may allocate each resource to contiguous lease terms, with no need to ``mind the gap'' and account for transfer costs. Similarly, service managers are free to vacate their leases just before expiration without concern for the authority-side teardown time. Of course, each guest is still responsible for completing its leave operations before the lease expires: the authority is empowered to unilaterally initiate teardown whether the guest is ready or not.
Actors are externally clocked to eliminate any dependency on absolute time. Time-related state transitions are driven by a virtual clock that advances in response to external tick calls. This feature is useful to exercise the system and control the timing and order of events. In particular, it enables emulation experiments in virtual time, as for several of the experiments in Section 5. The emulations run with null resource drivers that impose various delays but do not actually interact with external resources. All actors retain and cache lease state in memory, in part to enable lightweight emulation-mode experiments without an external repository.
COD was initially designed to control physical machines with database-driven network booting (PXE/DHCP). The physical booting machinery is familiar from Emulab [28], Rocks [23], and recent commercial systems. In addition to controlling the IP address bindings assigned by PXE/DHCP, the node driver controls boot images and options by generating configuration files served via TFTP to standard bootloaders (e.g., grub).
A COD site authority drives cluster reconfiguration in part by writing to an external directory server. The COD schema is a superset of the RFC 2307 standard schema for a Network Information Service based on LDAP directories. Standard open-source services exist to administer networks from a LDAP repository compliant with RFC 2307. The DNS server for the site is an LDAP-enabled version of BIND9, and for physical booting we use an LDAP-enabled DHCP server from the Internet Systems Consortium (ISC). In addition, guest nodes have read access to an LDAP directory describing the containing virtual cluster. Guest nodes configured to run Linux use an LDAP-enabled version of AutoFS to mount NFS file systems, and a PAM/NSS module that retrieves user logins from LDAP.
COD should be comfortable for cluster site operators to adopt, especially if they already use RFC 2307/LDAP for administration. The directory server is authoritative: if the COD site authority fails, the disposition of the cluster is unaffected until it recovers. Operators may override the COD server with tools that access the LDAP configuration directory.
In addition to the node drivers, COD includes classes to manage node sets and IP and DNS name spaces at the slice level. The authority names each instantiated node with an ID that is unique within the slice. It derives node hostnames from the ID and a specified prefix, and allocates private IP addresses as offsets in a subnet block reserved for the virtual cluster when the first node is assigned to it. Although public address space is limited, our prototype does not yet treat it as a managed resource. In our deployment the service managers run on a control subnet with routes to and from the private IP subnets.
In a further test of the Shirako architecture, we extended COD to manage virtual machines using the Xen hypervisor [2]. The extensions consist primarily of a modified node driver plugin and extensions to the authority-side mapper policy module to assign virtual machine images to physical machines. The new virtual node driver controls booting by opening a secure connection to the privileged control domain on the Xen node, and issuing commands to instantiate and control Xen virtual machines. Only a few hundred lines of code know the difference between physical and virtual machines. The combination of support for both physical and virtual machines offers useful flexibility: it is possible to assign blocks of physical machines dynamically to boot Xen, then add them to a resource pool to host new virtual machines.
COD install actions for node setup include some or all of the following: writing LDAP records; generating a bootloader configuration for a physical node, or instantiating a virtual machine; staging and preparing the OS image, running in the Xen control domain or on an OS-dependent trampoline such as Knoppix on the physical node; and initiating the boot. The authority writes some configuration-specific data onto the image, including the admin public keys and host private key, and an LDAP path reference for the containing virtual cluster.
We evaluate the Shirako/COD prototype under emulation and in a real deployment. All experiments run on a testbed of IBM x335 rackmount servers, each with a single 2.8Ghz Intel Xeon processor and 1GB of memory. Some servers run Xen's virtual machine monitor version 3.0 to create virtual machines. All experiments run using Sun's Java Virtual Machine (JVM) version 1.4.2. COD uses OpenLDAP version 2.2.23-8, ISC's DHCP version 3.0.1rc11, and TFTP version 0.40-4.1 to drive network boots. Service manager, broker, and site authority Web Services use Apache Axis 1.2RC2.
Most experiments run all actors on one physical server within a single JVM. The actors interact through local proxy stubs that substitute local method calls for network communication, and copy all arguments and responses. When LDAP is used, all actors are served by a single LDAP server on the same LAN segment. Note that these choices are conservative in that the management overhead concentrates on a single server. Section 5.3 gives results using SOAP/XML messaging among the actors.
We first examine the latency and overhead to lease a virtual cluster for a sample guest application, the CardioWave parallel MPI heart simulator [24]. A service manager requests two leases: one for a coordinator node to launch the MPI job and another for a variable-sized block of worker nodes to run the job. It groups and sequences the lease joins as described in Section 3.5 so that all workers activate before the coordinator. The join handler launches CardioWave programmatically when the virtual cluster is fully active.
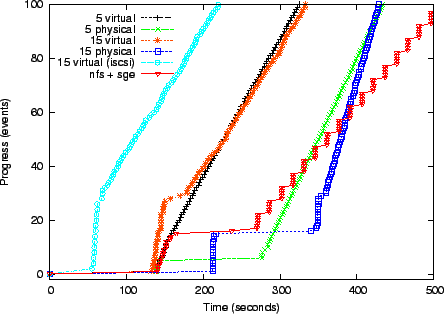 |
Figure 4 charts the progress of lease activation and the CardioWave run for virtual clusters of 5 and 15 nodes, using both physical and Xen virtual machines, all with 512MB of available memory. The guest earns progress points for each completed node join and each block of completed iterations in CardioWave. Each line shows: (1) an initial flat portion as the authority prepares a file system image for each node and initiates boots; (2) a step up as nodes boot and join, (3) a second flatter portion indicating some straggling nodes, and (4) a linear segment that tracks the rate at which the application completes useful work on the virtual cluster once it is running.
The authority prepares each node image by loading a 210MB compressed image (Debian Linux 2.4.25) from a shared file server and writing the 534MB uncompressed image on a local disk partition. Some node setup delays result from contention to load the images from a shared NFS server, demonstrating the value of smarter image distribution (e.g., [15]). The left-most line in Figure 4 also shows the results of an experiment with iSCSI root drives flash-cloned by the setup script from a Network Appliance FAS3020 filer. Cloning iSCSI roots reduces VM configuration time to approximately 35 seconds. Network booting of physical nodes is slower than Xen and shows higher variability across servers, indicating instability in the platform, bootloader, or boot services.
Cardiowave is an I/O-intensive MPI application. It shows better scaling on physical nodes, but its performance degrades beyond ten nodes. With five nodes the Xen cluster is 14% slower than the physical cluster, and with 15 nodes it is 37% slower. For a long CardioWave run, the added Xen VM overhead outweighs the higher setup cost to lease physical nodes.
A more typical usage of COD in this setting would be to instantiate batch task services on virtual compute clusters [7], and let them schedule Cardiowave and other jobs without rebooting the nodes. Figure 4 includes a line showing the time to instantiate a leased virtual cluster comprising five Xen nodes and an NFS file server, launch a standard Sun GridEngine (SGE) job scheduling service on it, and subject it to a synthetic task load. This example uses lease groups to sequence configuration as described in Section 3.5. The service manager also stages a small data set (about 200 MB) to the NFS server, increasing the activation time. The steps in the line correspond to simultaneous completion of synthetic tasks on the workers.
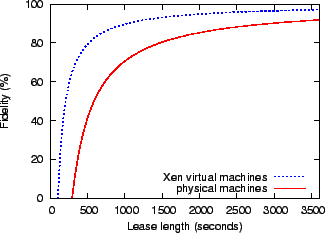 |
Figure 5 uses the setup/join/leave/teardown costs from the previous experiment to estimate their effect on the system's fidelity to its lease contracts. Fidelity is the percentage of the lease term that the guest application is able to use its resources. Amortizing these costs over longer lease terms improves fidelity. Since physical machines take longer to setup than Xen virtual machines, they have a lower fidelity and require longer leases to amortize their costs.
This section demonstrates the role of brokers to arbitrate resources under changing workload, and coordinate resource allocation from multiple sites. This experiment runs under emulation (as described in Section 4.2) with null resource drivers, virtual time, and lease state stored only in memory (no LDAP). In all other respects the emulations are identical to a real deployment. We use two emulated 70-node cluster sites with a shared broker. The broker implements a simple policy that balances the load evenly among the sites.
 |
We implemented an adaptive service manager that requests resource leases
at five-minute intervals to match
a changing load signal. We derived sample input loads from traces of
two production systems: a job trace from a production
compute cluster at Duke, and a trace of CPU load from a major e-commerce
website. We scaled the load signals
to a common basis.
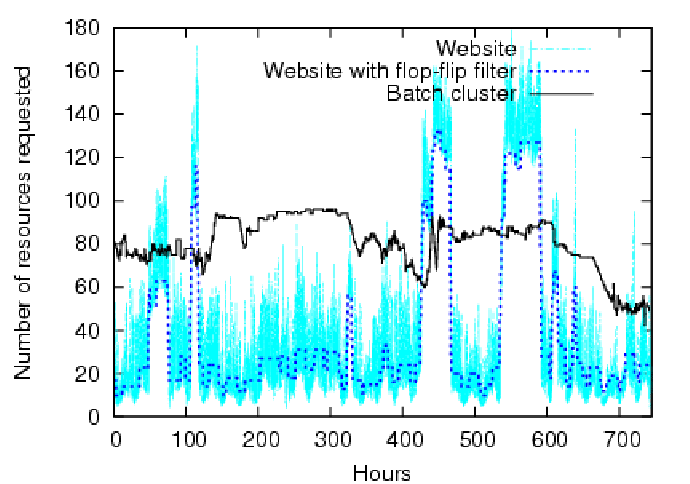
Figure 6 shows scaled cluster resource
demand--interpreted as the number of nodes to request--over a one-month segment
for both traces (five-minute intervals).
We smoothed the e-commerce demand curve with a ``flop-flip'' filter
from [6]. This filter holds a stable estimate of
demand ![]() =
=![]() until that estimate falls outside some
tolerance of a moving average (
until that estimate falls outside some
tolerance of a moving average (
![]() )
of recent observations, then it switches the estimate to the current
value of the moving average. The smoothed demand curve shown
in Figure 6 uses a 150-minute sliding window moving
average, a step threshold of one standard deviation, and a heavily
damped average
)
of recent observations, then it switches the estimate to the current
value of the moving average. The smoothed demand curve shown
in Figure 6 uses a 150-minute sliding window moving
average, a step threshold of one standard deviation, and a heavily
damped average ![]() =
=![]() .
.
 |
 |
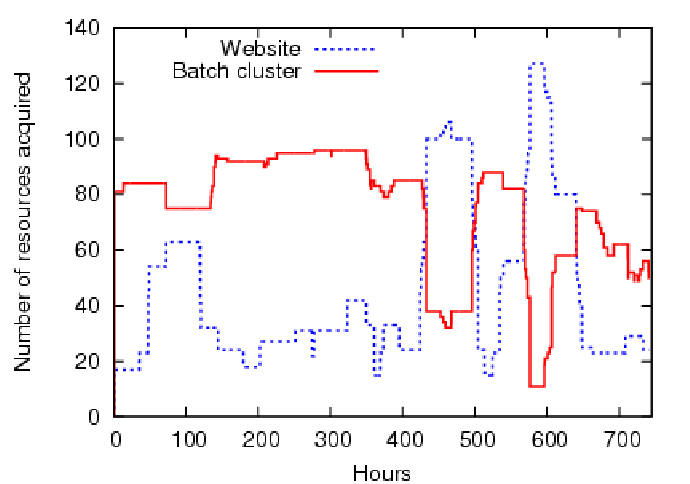 |
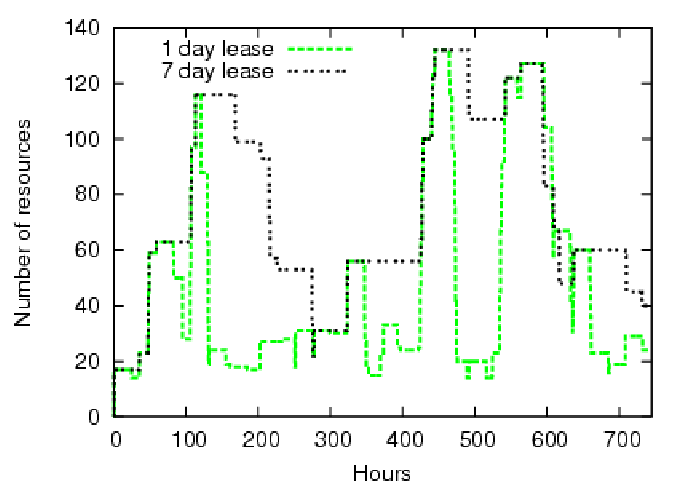
Figure 7 demonstrates the effect of varying lease terms on the broker's ability to match the e-commerce load curve. For a lease term of one day, the leased resources closely match the load; however, longer terms diminish the broker's ability to match demand. To quantify the effectiveness and efficiency of allocation over the one-month period, we compute the root mean squared error (RMSE) between the load signal and the requested resources. Numbers closer to zero are better: an RMSE of zero indicates that allocation exactly matches demand. For a lease term of 1 day, the RMSE is 22.17 and for a lease term of 7 days, the RMSE is 50.85. Figure 7 reflects a limitation of the pure brokered leasing model as prototyped: a lease holder can return unused resources to the authority, but it cannot return the ticket to the broker to allocate for other purposes.
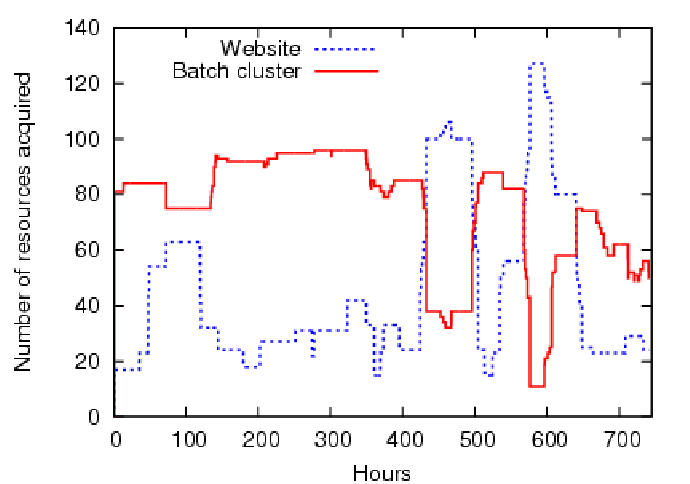
To illustrate adaptive provisioning between competing workloads,
we introduce a second service
manager competing for resources according to the batch load signal.
The broker uses FCFS priority scheduling to arbitrate
resource requests; the interactive e-commerce service receives a higher
priority. Figure 8 and Figure 9
shows the assigned slice sizes
for lease terms of (a) 12 emulated hours and (b) 3
emulated days, respectively. As expected, the
batch cluster receives fewer nodes during load surges in the e-commerce service.
However, with longer lease terms, load matching becomes less
accurate, and some short demand spikes are not served. In some
instances, resources assigned to one guest are idle while the other
guest saturates but cannot obtain more.
This is seen in the RMSE calculated from
Figure ![[*]](crossref.png) : the website has a RMSE of (a) 12.57 and (b)
30.70 and the batch cluster has a RMSE of (a) 23.20 and (b) 22.17.
There is a trade-off in choosing the length of lease terms: longer
terms are more stable and better able to amortize resource
setup/teardown costs improving fidelity (from
Section 5.1), but are not as agile to changing
demand as shorter leases.
: the website has a RMSE of (a) 12.57 and (b)
30.70 and the batch cluster has a RMSE of (a) 23.20 and (b) 22.17.
There is a trade-off in choosing the length of lease terms: longer
terms are more stable and better able to amortize resource
setup/teardown costs improving fidelity (from
Section 5.1), but are not as agile to changing
demand as shorter leases.
|
 |
These emulation experiments demonstrate how the lease management and
configuration services scale at saturation.
Table 3 lists the parameters used in our
experiment: for a given cluster size ![]() at a single site, one service
manager injects lease requests to a broker for
at a single site, one service
manager injects lease requests to a broker for ![]() nodes (without
lease extensions) evenly split across
nodes (without
lease extensions) evenly split across ![]() leases (for
leases (for ![]() nodes
per lease) every lease term
nodes
per lease) every lease term ![]() (giving a request injection rate of
(giving a request injection rate of
![]() ). Every lease term
). Every lease term ![]() the site must reallocate or ``flip'' all
the site must reallocate or ``flip'' all ![]() nodes. We measure the total overhead
including lease state maintenance, network communication costs, actor
database operations, and event polling costs. Given parameter values
we can derive the worst-case minimum
lease term, in real time, that the system can support at saturation.
nodes. We measure the total overhead
including lease state maintenance, network communication costs, actor
database operations, and event polling costs. Given parameter values
we can derive the worst-case minimum
lease term, in real time, that the system can support at saturation.
As explained in Section 4.2, each actor's operations are
driven by a virtual clock at an arbitrary rate.
The prototype polls the status of pending lease
operations (i.e., completion of join/leave and
setup/teardown events) on each tick. Thus, the rate at
which we advance the virtual clock has a direct impact on performance:
a high tick rate improves responsiveness to events such as
failures and completion of configuration actions, but generates higher
overhead due to increased polling of lease and resource status. In
this experiment we advance the virtual clock of each actor as fast as
the server can process the clock ticks,
and determine the amount of real time it takes to complete a
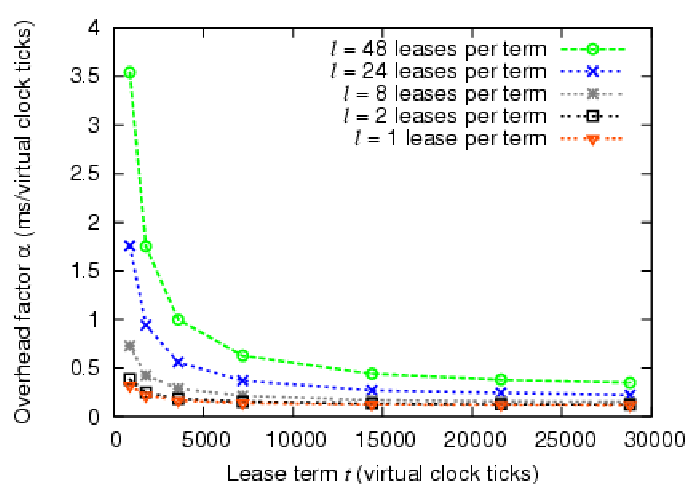
pre-defined number of ticks. We measure an overhead factor ![]() : the average lease management
overhead in milliseconds per clock tick. Lower numbers are better.
: the average lease management
overhead in milliseconds per clock tick. Lower numbers are better.
Local communication.
In this experiment, all actors run on a single x335 server and
communicate with local method calls and an in-memory database (no LDAP).
Figure 10 graphs ![]() as a function of lease term
as a function of lease term ![]() in virtual clock ticks; each line presents a different value of
in virtual clock ticks; each line presents a different value of ![]() keeping
keeping ![]() constant at 240. The graph shows that as
constant at 240. The graph shows that as ![]() increases,
the average overhead per virtual clock tick decreases; this occurs
because actors perform the most expensive operation, the reassignment
of
increases,
the average overhead per virtual clock tick decreases; this occurs
because actors perform the most expensive operation, the reassignment
of ![]() nodes, only once per lease term leaving less expensive
polling operations for the remainder of the term. Thus, as the number
of polling operations increases, they begin to dominate
nodes, only once per lease term leaving less expensive
polling operations for the remainder of the term. Thus, as the number
of polling operations increases, they begin to dominate ![]() .
Figure 10 also shows that as we increase the number of
leases injected per term,
.
Figure 10 also shows that as we increase the number of
leases injected per term, ![]() also increases. This demonstrates
the increased overhead to manage the leases.
also increases. This demonstrates
the increased overhead to manage the leases.
At a clock rate of one tick per second, the overhead
represents less than 1% of the latency to prime a node
(i.e., to write a new OS image on local disk and boot it).
As an example from
Figure 10, given this tick rate, for a lease term of 1
hour (3,600 virtual clock ticks), the total overhead of our
implementation is ![]() =
=![]() =
=![]() seconds with
seconds with ![]() =24
leases per term. The lease term
=24
leases per term. The lease term ![]() represents the minimum term we
can support considering only implementation overhead. For COD, these
overheads are at least an order of magnitude less than the
setup/teardown
cost of nodes with local storage. From this we conclude that the
setup/teardown cost, not overhead, is the
limiting factor for determining the minimum lease term. However,
overhead may have an effect on more fine-grained
resource allocation, such as CPU scheduling, where reassignments
occur at millisecond time scales.
represents the minimum term we
can support considering only implementation overhead. For COD, these
overheads are at least an order of magnitude less than the
setup/teardown
cost of nodes with local storage. From this we conclude that the
setup/teardown cost, not overhead, is the
limiting factor for determining the minimum lease term. However,
overhead may have an effect on more fine-grained
resource allocation, such as CPU scheduling, where reassignments
occur at millisecond time scales.
|
Table 4 shows the effect of varying the cluster size
![]() on the overhead factor
on the overhead factor ![]() . For each row of the table, the
service manager requests one lease (
. For each row of the table, the
service manager requests one lease (![]() =1) for
=1) for ![]() nodes (
nodes (![]() =
=![]() )
with a lease term of 3,600 virtual clock ticks (corresponding to a 1
hour lease with a tick rate of 1 second). We report the average and
one standard deviation of
)
with a lease term of 3,600 virtual clock ticks (corresponding to a 1
hour lease with a tick rate of 1 second). We report the average and
one standard deviation of ![]() across ten runs. As expected,
across ten runs. As expected,
![]() and
and ![]() increase with cluster size, but as before,
increase with cluster size, but as before, ![]() remains an order of magnitude less than the setup/teardown costs of a
node.
remains an order of magnitude less than the setup/teardown costs of a
node.
|
SOAP and LDAP. We repeat the same experiment with the
service manager running on a separate x335 server, communicating
with the broker and authority using SOAP/XML. The authority
and broker write their state to a shared LDAP directory server.
Table 5 shows the impact of the higher overhead
on ![]() and
and ![]() ,
for
,
for ![]() =240. Using
=240. Using ![]() , we calculate the maximum number of node
flips per millisecond
, we calculate the maximum number of node
flips per millisecond ![]() =
=
![]() at saturation.
The SOAP and LDAP overheads dominate all other lease
management costs: with
at saturation.
The SOAP and LDAP overheads dominate all other lease
management costs: with ![]() nodes, an x335 can process 380 node flips per second, but
SOAP and LDAP communication overheads reduce peak flip throughput
to 1.9 nodes per second. Even so,
neither value presents a limiting factor for today's cluster sizes
(thousands of nodes). Using SOAP and LDAP at saturation requires a
minimum lease term
nodes, an x335 can process 380 node flips per second, but
SOAP and LDAP communication overheads reduce peak flip throughput
to 1.9 nodes per second. Even so,
neither value presents a limiting factor for today's cluster sizes
(thousands of nodes). Using SOAP and LDAP at saturation requires a
minimum lease term ![]() of 122 seconds, which approaches the
setup/teardown latencies (Section 5.1).
of 122 seconds, which approaches the
setup/teardown latencies (Section 5.1).
From these scaling experiments, we conclude that lease overhead is quite modest, and that costs are dominated by per-tick resource polling, node reassignment, and network communication. In this case, the dominant costs are LDAP access and SOAP operations and the cost for Ant to parse the XML configuration actions and log them.
Variants of leases are widely used when a client holds a resource on a server. The common purpose of a lease abstraction is to specify a mutually agreed time at which the client's right to hold the resource expires. If the client fails or disconnects, the server can reclaim the resource when the lease expires. The client renews the lease periodically to retain its hold on the resource.
Lifetime management. Leases are useful for distributed garbage collection. The technique of robust distributed reference counting with expiration times appeared in Network Objects [5], and subsequent systems--including Java RMI [29], Jini [27], and Microsoft .NET--have adopted it with the ``lease'' vocabulary. Most recently, Web Services WSRF [10] has defined a lease protocol as a basis for lifetime management of hosted services.
Mutual exclusion. Leases are also useful as a basis for distributed mutual exclusion, most notably in cache consistency protocols [14,21]. To modify a block or file, a client first obtains a lease for it in an exclusive mode. The lease confers the right to access the data without risk of a conflict with another client as long as the lease is valid. The key benefit of the lease mechanism itself is availability: the server can reclaim the resource from a failed or disconnected client after the lease expires. If the server fails, it can avoid issuing conflicting leases by waiting for one lease interval before granting new leases after recovery.
Resource management. As in SHARP [13], the use of leases in Shirako combines elements of both lifetime management and mutual exclusion. While providers may choose to overbook their physical resources locally, each offered logical resource unit is held by at most one lease at any given time. If the lease holder fails or disconnects, the resource can be allocated to another guest. This use of leases has three distinguishing characteristics:.
Leases in Shirako are also similar to soft-state advance reservations [8,30], which have long been a topic of study for real-time network applications. A similar model is proposed for distributed storage in L-bone [3]. Several works have proposed resource reservations with bounded duration for the purpose of controlling service quality in a grid. GARA includes support for advance reservations, brokered co-reservations, and adaptation [11,12].
Virtual execution environments. New virtual machine technology expands the opportunities for resource sharing that is flexible, reliable, and secure. Several projects have explored how to link virtual machines in virtual networks [9] and/or use networked virtual machines to host network applications, including SoftUDC [18], In Vigo [20], Collective [25], SODA [17], and Virtual Playgrounds [19]. Shared network testbeds (e.g., Emulab/Netbed [28] and PlanetLab [4]) are another use for dynamic sharing of networked resources. Many of these systems can benefit from foundation services for distributed lease management.
PlanetLab was the first system to demonstrate dynamic instantiation of virtual machines in a wide-area testbed deployment with a sizable user base. PlanetLab's current implementation and Shirako differ in their architectural choices. PlanetLab consolidates control in one central authority (PlanetLab Central or PLC), which is trusted by all sites. Contributing sites are expected to relinquish permanent control over their resources to the PLC. PlanetLab emphasizes best-effort open access over admission control; there is no basis to negotiate resources for predictable service quality or isolation. PlanetLab uses leases to manage the lifetime of its guests, rather than for resource control or adaptation.
The PlanetLab architecture permits third-party brokerage services with the endorsement of PLC. PlanetLab brokers manage resources at the granularity of individual nodes; currently, the PlanetLab Node Manager cannot control resources across a site or cluster. PLC may delegate control over a limited share of each node's resources to a local broker server running on the node. PLC controls the instantiation of guest virtual machines, but each local broker is empowered to invoke the local Node Manager interface to bind its resources to guests instantiated on its node. In principle, PLC could delegate sufficient resources to brokers to permit them to support resource control and dynamic adaptation coordinated by a central broker server, as described in this paper.
One goal of our work is to advance the foundations for networked resource sharing systems that can grow and evolve to support a range of resources, management policies, service models, and relationships among resource providers and consumers. Shirako defines one model for how the PlanetLab experience can extend to a wider range of resource types, federated resource providers, clusters, and more powerful approaches to resource virtualization and isolation.
This document was generated using the LaTeX2HTML translator Version 2002-2-1 (1.71)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons paper.tex
The translation was initiated by Jeannie Albrecht on 2006-04-27
|
Last changed: 9 May 2006 ch |