OSDI '06 Paper
Pp. 131–146 of the Proceedings
eXplode: a Lightweight, General System for Finding
Serious Storage System Errors
Junfeng Yang, Can Sar, and Dawson Engler
Computer Systems Laboratory
Stanford University
|
Abstract:
Storage systems such as file systems, databases, and RAID systems
have a simple, basic contract: you give them data, they do not lose or
corrupt it. Often they store the only copy, making its irrevocable
loss almost arbitrarily bad. Unfortunately, their code is exceptionally
hard to get right, since it must correctly
recover from any crash at any program point, no matter how their
state was smeared across volatile and persistent memory.
This paper describes eXplode, a system that makes it easy to
systematically check real storage systems for errors. It takes
user-written, potentially system-specific checkers and uses
them to drive a storage system into tricky corner cases,
including crash recovery errors. eXplode uses a novel adaptation of
ideas from model
checking, a comprehensive, heavy-weight formal verification technique,
that makes its checking more systematic (and hopefully more
effective) than a pure testing approach while being just as lightweight.
eXplode is effective. It found serious bugs in a broad range of
real storage systems (without requiring source code): three version
control systems, Berkeley DB, an NFS implementation, ten file systems, a RAID
system, and the popular VMware GSX virtual machine. We found
bugs in every system we checked, 36 bugs in total, typically with
little effort.
1 Introduction
Storage system errors are some of the most destructive errors possible.
They can destroy persistent data, with almost arbitrarily bad
consequences if the system had the only copy.
Unfortunately, storage code is simultaneously both difficult
to reason about and difficult to test. It must always
correctly recover to a valid state if the system crashes at any
program point, no matter what data is being mutated, flushed (or not
flushed) to disk, and what invariants have been violated. Further,
despite the severity of storage system bugs, deployed testing methods
remain primitive, typically a combination of manual inspection (with the
usual downsides), fixes in reaction to bug reports (from angry users)
and, at advanced sites, the alleged use of manual extraction of power
cords from sockets (a harsh test indeed, but not comprehensive).
This paper presents eXplode, a system that makes it easy to thoroughly
check real systems for such crash recovery bugs. It gives clients a clean
framework to build and plug together powerful, potentially system-specific
dynamic storage checkers. eXplode makes it easy for checkers to find bugs
in crash recovery code: as they run on a live system they tell eXplode
when to generate the disk images that could occur if the system crashed
at the current execution point, which
they then check for errors.
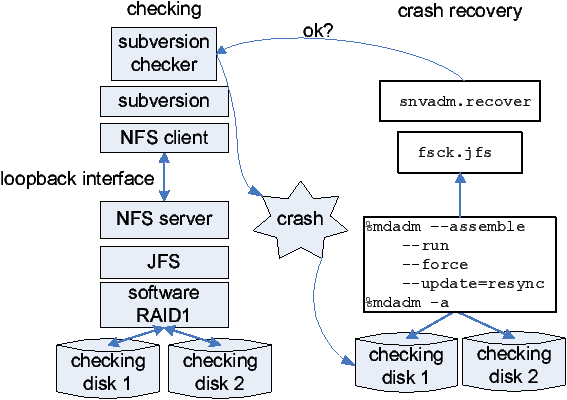
We explicitly designed eXplode so that clients can check complex
storage stacks built from many different subsystems. For example,
Figure 1 shows a version control system on top of
NFS on top of the JFS file system on top of RAID. eXplode makes it quick
to assemble checkers for such deep stacks by providing interfaces that
let users write small checker components and then plug them together
to build many different checkers.
Checking entire storage stacks has several benefits. First, clients
can often quickly check a new layer (sometimes in minutes) by reusing
consistency checks for one layer to check all the layers below it.
For example, given an existing file system checker, if we can slip a RAID
layer below the file system we can immediately use the file system checker
to detect if the RAID causes errors. (Section 9
uses this approach to check NFS, RAID, and a virtual machine.) Second,
it enables strong end-to-end checks, impossible if we could only check
isolated subsystems: correctness in isolation cannot guarantee correctness in
composition [22].
Finally, users can localize errors by cross-checking
different implementations of a layer. If NFS works incorrectly on seven
out of eight file systems, it probably has a bug, but if it only breaks
on one, that single file system probably does (Section 9.2).
We believe eXplode as described so
far is a worthwhile engineering contribution. A second
conceptual contribution is its adaptation of ideas from model
checking [6, 17, 15],
a typically heavyweight formal verification technique, to make its
checking more systematic (and thus hopefully more effective) than a pure
testing approach while remaining as lightweight as testing.
Traditional model checking takes a specification of a system
(a “model”) which it checks by starting from an initial state and
repeatedly performing all possible actions to this state and its
successors. A variety of techniques exist to make this exponential
search less inefficient. Model checking has shown promise in
finding corner-case errors. However, requiring implementors to
rewrite their system in an artificial modeling language makes it extremely
expensive for typical storage systems (read: almost always impractical).
Recent work on implementation-level model
checking [13, 3, 18]
eliminates the need to write a model by using code itself as its own
(high-fidelity) model. We used this approach in prior work to find
serious errors in Linux file systems [30]. However,
while more practical than a traditional approach, it required running
the checked Linux system inside the model checker itself as a user-space
process, which demanded enormously invasive modifications. The nature of
the changes made it hard to check anything besides file systems and, even
in the best case, checking a new file system took a week's work. Porting to a new
Linux kernel, much less a different operating system, could take months.
This paper shows how to get essentially all the model checking benefits of
our prior work with little effort by turning the checking
process inside out. Instead of shoehorning the checked system inside
the model checker (or worse, cutting parts of the checked system out,
or worse still, creating models of the checked code) it interlaces
the control needed for systematic state exploration in situ,
throughout the checked system, reducing the modifications needed down
to a single device driver, which can run inside of a lightly-instrumented,
stock kernel
running on real hardware. As a result, eXplode can thoroughly check large
amounts of storage system code with little effort.
Figure 1:
A snapshot of eXplode with a stack of storage
systems being
checked on the left and the recovery tools being run on the right after
eXplode “crashes” the system to generate possible crash disks.
This example checks Subversion
running on top of NFS exporting a JFS file system
running on RAID.
Running checks on a live, rather than emulated, system has several nice
fallouts. Because storage systems already provide many management and
configuration utilities, eXplode checkers can simply use this pre-built
machinery rather than re-implementing or emulating it. It also becomes
trivial to check new storage systems: just mount and run them.
Finally, any check that can be run on the base system can also be run
with eXplode.
The final contribution of the paper is an experimental
evaluation of eXplode that shows the following:
-
eXplode checkers are effective
(Section 7—Section 9). We found
bugs in every system we checked, 36 bugs in total,
typically with little effort, and often without source code
(Section 8.1, Section 9.3). Checking
without source code is valuable, since many robust systems rely
on third-party software that must be vetted in the context of
the integrated system.
- eXplode checkers have enough power to do thorough checks,
demonstrated by using it to comprehensively check ten Linux
file systems (Section 7).
- Even simple checkers find bugs (Section 8).
Tiny checkers found bugs in three version control
systems (Section 8.1) and a widely-used
database (Section 8.2).
- eXplode makes it easy to check subsystems
designed to transparently slip into storage stacks
(Section 9).
We reused file system checkers to quickly find errors
in RAID (Section 9.1), NFS (Section 9.2),
and VMware (Section 9.3), which should not (but do)
break the behavior of storage systems layered above or below them.
The paper is organized as follows. We first state our principles
(Section 2) and then show how to use eXplode to check an
example storage system stack (Section 3). We then
give an overview of eXplode (Section 4)
and focus on how it: (1) explores
alternative actions in checked code (Section 5) and
(2)
checks crashes (Section 6). After the experimental
evaluation (Section 7—Section 9),
we discuss our experiences porting eXplode to FreeBSD (Section 10),
contrast with related work (Section 11), and then conclude
(Section 12).
2 Principles
In a sense, this entire paper boils down to the repeated application
of a single principle:
Explore all choices:
When a program point can legally
do one of N different actions, fork execution N times and
do each.
For example, the kernel memory allocator can return NULL,
but rarely does so in practice. For each call to this allocator
we want to fork and do both actions. The next
principle feeds off of this one:
Exhaust states:
Do every possible action to a state before exploring another
state. In our context, a state is defined as a snapshot of the
system we check.
We distilled these two principles after several years of using model
checking to find bugs. Model checking has a variety of
tricks, some exceptionally complex. In retrospect, these capture the one
feature of a model checking approach that we would take over all others:
systematically do every legal action to a state, missing nothing,
then pick another state, and repeat. This approach reliably finds
interesting errors, even in well-tested code. We are surprised when it
does not work. The key feature of this principle over traditional testing
is that it makes low-probability events (such as crashes) as probable as
high-probability events, thereby quickly driving the checked system into
tricky corner-cases. The final two principles come in reaction to much
of the pain we had with naive application of model checking to large,
real systems.
Touch nothing. Almost invariably, changing the behavior of a
large checked system has been a direct path to experiences that we
never want to repeat. The internal interfaces of such systems are often
poorly defined. Attempting to emulate or modify them produces corner-case
mistakes that model checking is highly optimized to detect.
Instead we try to do everything
possible to run the checked system as-is and parasitically gather the
information we need for checking as it runs.
Report only true errors, deterministically. The errors our system
flags should be real errors, reduced to deterministic, replayable traces.
All checking systems share this motherhood proclamation, but, in our
context it has more teeth than usual: diagnosing even deterministic,
replayable storage errors can take us over a day.
The cost of a false one is enormous, as is the time needed to fight with
any non-determinism.
3 How to Check a Storage System
This section shows how clients use eXplode interfaces to check a storage
system, using a running example of a simple file system checker.
Clients use eXplode to do two main things to a storage system. First,
systematically exhaust all possibilities when the checked system can do
one of several actions. Second, check that it correctly recovers from
a crash. Clients can also check non-crash properties by simply inserting
code to do so in either their checker or checked code itself
without requiring eXplode support
(for an
example see Section 7.2).
Below, we explain how clients expose decision points in the checked
code (Section 3.1). We then explain the three system-specific
components that clients provide (written in C++). One, a checker
that performs storage system operations and checks that they
worked correctly (Section 3.2). Two, a
storage
component that sets up the checked system (Section 3.3).
Finally, a checking stack that combines the first two into a
checking harness (Section 3.4).
3.1 How checked code exposes choice: choose
Like prior model checkers [13, 30],
eXplode provides a
function, choose, that clients use to select among possible choices in
checked code. Given a program point
that has N possible actions clients insert a call “choose(N),”
which will appear to fork execution N times, returning the values 0,
1, ..., N−1 in each child execution respectively.
They then write code that uses
this return value to pick one unique action out of the N possibilities.
eXplode can exhaust all possible actions at this choose call
by running all forked children.
We define a code location that can pick one of several different
legal actions to be a choice point and the act of doing so a
choice.
An example: in low memory situations the Linux kmalloc function
can return NULL when called without the __GFP_NOFAIL
flag. But it rarely does so in practice, making it difficult
to comprehensively check that callers correctly handle this case.
We can use choose to systematically
explore both success and failure cases of each kmalloc call
as follows:
void * kmalloc(size_t size, int flags) {
if((flags & __GFP_NOFAIL) == 0)
if(choose(2) == 0)
return NULL;
...
Typically clients add a small number of such calls. On Linux, we
used choose to fail six kernel functions: kmalloc (as above),
page_alloc (page allocator), access_ok (verify
user-provided pointers), bread (read a block),
read_cache_page (read a page),
and end_request (indicate that a disk request completed).
The inserted code mirrors that in kmalloc:
a call choose(2) and an if-statement to pick whether to either
(0) return an error or (1) run normally.
3.2 Driving checked code: The checker
1 : const char *dir = "/mnt/sbd0/test-dir";
2 : const char *file = "/mnt/sbd0/test-file";
3 : static void do_fsync(const char *fn) {
4 : int fd = open(fn, O_RDONLY);
5 : fsync(fd);
6 : close(fd);
7 : }
8 : void FsChecker::mutate(void) {
9 : switch(choose(4)) {
10: case 0: systemf("mkdir %s%d", dir, choose(5)); break;
11: case 1: systemf("rmdir %s%d", dir, choose(5)); break;
12: case 2: systemf("rm %s", file); break;
13: case 3: systemf("echo \"test\" > %s", file);
14: if(choose(2) == 0)
15: sync();
16: else {
17: do_fsync(file);
18: // fsync parent to commit the new directory entry
19: do_fsync("/mnt/sbd0");
20: }
21: check_crash_now(); // invokes check() for each crash
22: break;
23: }
24: }
25: void FsChecker::check(void) {
26: ifstream in(file);
27: if(!in)
28: error("fs", "file gone!");
29: char buf[1024];
30: in.read(buf, sizeof buf);
31: in.close();
32: if(strncmp(buf, "test", 4) != 0)
33: error("fs", "wrong file contents!");
34: }
Figure 2: Example file system checker. We omit the class initialization
code and some sanity checks.
The client provides a checker that eXplode uses to drive and check a
given storage system. The checker implements five methods:
-
mutate: performs system-specific operations and calls
into eXplode to explore choices and to do crash checking.
- check: called after each eXplode-simulated crash to
check for storage system errors.
- get_sig: an optional method which returns a byte-array
signature
representing the current state of the checked system. It uses
domain-specific knowledge to discard irrelevant details so that
eXplode knows when two superficially different states are equivalent
and avoids repeatedly checking them.
The default get_sig simply records all choices
made to produce the current state.
- init and finish: optional methods to
set up and clear the checker's internal state, called
when eXplode mounts and unmounts the checked system.
Checkers range from aggressively system-specific (or even code-version
specific) to the fairly generic. Their size scales with the complexity
of the invariants checked, from a few tens to many thousands of lines.
Figure 2 shows a file system checker that checks a
simple correctness property: a file that has been synchronously written to
disk (using either the fsync or sync system calls) should persist
after a crash. Mail servers, databases and other application storage
systems depend on this behavior to prevent crash-caused data obliteration.
While simple, the checker illustrates common features of many checkers,
including the fact that it catches some interesting bugs.
The mutate method calls choose(4) (line 9) to fork and do each of
four possible actions: (1) create a directory,
(2) delete it, (3) create a test file, or (4) delete it.
The first two actions then call choose(5) and create or delete
one of five directories (the directory name is based on choose's
return value). The file creation action calls choose(2)
(line 14)
and forces the test file to disk using sync in one child and
fsync in the other.
As Figure 3 shows,
one mutate call creates thirteen children.
Figure 3: Choices made by one invocation of
the mutate method
in Figure 2's
checker. It creates thirteen children.
The checker calls eXplode to check crashes. While
other code in the system can also initiate such checking, typically
it is the mutate method's responsibility: it issues operations
that change the storage system, so it knows the correct system state
and when this state changes. In our example, after mutate forces
the file to disk it calls the eXplode routine check_crash_now().
eXplode then generates all crash disks at the exact moment of the call and
invokes the check method on each after repairing and mounting it
using the underlying storage component (see Section 3.3).
The check method checks if the test file exists (line 27) and has
the right contents (line 32). While simple, this exact checker catches
an interesting bug in JFS where upon crash, an fsync'd file loses
all its contents triggered by the corner-case reuse of a directory
inode as a file inode (Section 7.3 discusses a more
sophisticated version of this checker).
So far we have described how a single mutate call works.
The next section shows how it fits in the checking process.
In addition, checking crashes at only a single code point is crude;
Section 6 describes the routines eXplode provides for
more comprehensive checking.
3.3 Setting up checked code: Storage components
Since eXplode checks live storage systems, these systems must be
up and running. For each storage subsystem involved in checking,
clients provide a storage component that implements
five methods:
-
init: one-time initialization, such as formatting
a file system partition or creating a fresh database.
- mount: set up the storage system so that operations
can be performed on it.
- unmount: tear down the storage system; used by
eXplode to clear the storage system's state so it
can explore a different one (Section 5.2).
- recover: repair the storage system after an eXplode-simulated crash.
- threads: return the thread IDs for the storage system's
kernel threads. eXplode
reduces non-determinism by only running these threads
when it wants to
(Section 5.2).
Clients write a component once for a given storage system and then
reuse it in different checkers. Storage systems tend to be easy to
set up, otherwise they will not get used. Thus, components tend
to be simple and small since they can merely wrap up already-present
system commands (e.g., shell script invocations).
void Ext3::init(void) {
// create an empty ext3 FS with user-specified block size
systemf("mkfs.ext3 -F -j -b %d %s",
get_option(blk_size), children[0]->path());
}
void Ext3::recover() {
systemf("fsck.ext3 -y %s", children[0]->path());
}
void Ext3::mount(void) {
int ret = systemf("sudo mount -t ext3 %s %s",
children[0]->path(), path());
if(ret < 0) error("Corrupt FS: Can't mount!");
}
void Ext3::umount(void) {
systemf("sudo umount %s", path());
}
void Ext3::threads(threads_t &thids) {
int thid;
if((thid=get_pid("kjournald")) != -1)
thids.push_back(thid);
else
explode_panic("can't get kjournald pid!");
}
Figure 4: Example storage component for the ext3 file system.
The C++ class member children chains all storage components
that a component is based on; ext3 has only one child.
Figure 4 shows
a storage component for the ext3 file system that illustrates
these points. Its first four
methods call standard ext3 commands.
The one possibly non-obvious method is threads, which
returns the thread ID of ext3's kernel thread (kjournald)
using the expedient hack of calling the built-in eXplode routine get_pid
which automatically extracts this ID from the output of the ps
command.
3.4 Putting it all together: The checking stack
The checking stack builds a checker by glueing storage system components
together and then attaching a single checker on top of them. The lowest
component of a checking stack typically is a custom
RAM disk (downloaded from [24] and slightly modified).
While eXplode runs on real disks, using a
RAM disk avoids non-deterministic interrupts and gives eXplode precise,
fast control over the contents of a checked system's “persistent”
storage. The simplest storage stack attaches a checker to one eXplode
RAM disk. Such a stack does no useful crash checking, so clients
typically glue one or more storage subsystems between these two.
Currently a stack can only have one checker. However, there can be a
fan-out of storage components, such as setting up multiple RAM disks to
make a RAID array. Given a stack, eXplode initializes the checked storage
stack by calling each init bottom up, and then mount bottom up.
After a crash, it calls the recover methods bottom up as well.
To unmount,
eXplode applies unmount top down. Figure 5
shows a three-layer storage stack.
// Assemble FS + RAID storage stack step by step.
void assemble(Component *&top, TestDriver *&driver) {
// 1. load two RAM disks with size specified by user
ekm_load_rdd(2, get_option(rdd, sectors));
Disk *d1 = new Disk("/dev/rdd0");
Disk *d2 = new Disk("/dev/rdd1");
// 2. plug a mirrored RAID array onto the two RAM disks.
Raid *raid = new Raid("/dev/md0", "raid1");
raid->plug_child(d1);
raid->plug_child(d2);
// 3. plug an ext3 system onto RAID
Ext3 *ext3 = new Ext3("/mnt/sbd0");
ext3->plug_child(raid);
top = ext3; // let eXplode know the top of storage stack
// 4. attach a file system test driver onto ext3 layer
driver = new FsChecker(ext3);
}
Figure 5: Checking stack: file system checker
(Figure 2)
on an ext3 file
system
(Figure 4)
on a mirrored RAID array on two eXplode
RAM disks. We elide the trivial class
definitions Raid and Disk.
4 Implementation Overview
This section gives an overview of eXplode. The next two sections discuss
the implementation of
its
most important features: choice and crash checking.
The reader should keep in mind that conceptually
what
eXplode does is very simple. If we assume infinite
resources and ignore some details, the following would approximate its
implementation:
-
Create a clean initial state (Section 3.3)
and invoke the client's mutate on it.
- At every choose(N) call, fork N children.
- On client request, generate all crash disks and run
the client check method on them.
- When mutate returns, re-invoke it.
This is it. The bulk of eXplode is code for approximating
this loop with finite resources, mainly the machinery to save and restore
the checked system so it can run one child at a time rather than
an exponentially increasing number all-at-once. As a result, eXplode
unsurprisingly looks like a primitive operating system: it has a
queue of saved processes,
a scheduler that picks which of these jobs to run, and time slices
(that start when mutate is invoked and end when it returns).
eXplode's scheduling algorithm:
exhaust all possible combinations of choices within a single mutate
call before doing another
(Section 2). (Note that turning eXplode into a random
testing framework is easy: never save and restore states and make each
choose(N) call return a random integer [0,N) rather than forking,
recording each choice for error replay.)
The above sketch glosses over some important details;
we give a more accurate
description below, but the reader should keep this helpful, simplistic
one in mind.
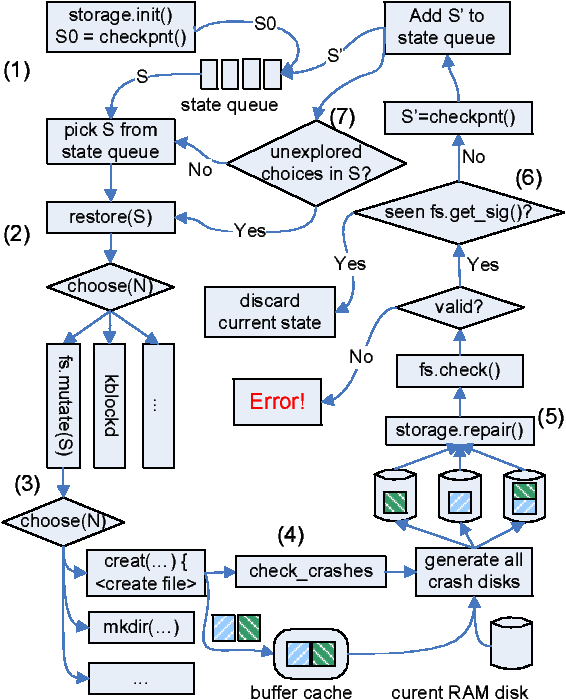
Figure 6: Simplified view of eXplode's state exploration loop for the file
system checker in Figure 2; some choose
transitions and method calls elided for space.
From a formal method's perspective, the core of eXplode is a simple,
standard model checking loop based on exhausting state
choices. Figure 6
shows this view of eXplode as applied to the file system checker
of the previous section; the numbered labels in the figure correspond
to the numbers in the list below:
-
eXplode initializes the checked system using client-provided
init methods. It seeds the checking process by saving
this state and putting it on the state queue, which holds all
states (jobs) to explore. It separately saves the created
disk image for use as a pristine initial disk.
- The eXplode “scheduler” selects a state S from its
state queue, restores it to produce a running storage system,
and invokes choose to run either
the mutate method or one of the checked systems' kernel threads.
In the figure, mutate is selected.
- mutate invokes choose to pick an action.
In our example it
picks creat and calls it, transferring control to the running
Linux kernel. The creat system call writes two dirty blocks
to the buffer cache and returns back to mutate.
- mutate calls eXplode to check that the
file system correctly recovers from any crash at this
point.
- eXplode generates combinations of disks that could be seen
after a crash. It then runs the client code to: mount the
crash disk, recover it, and check it. If these methods
flag an error or they crash, eXplode records enough information to
recreate this error, and stops exploring this state.
- Otherwise eXplode returns back into mutate which in turn
returns. eXplode checks if it has already seen the current state
using the abstracted representation returned by get_sig.
If it has, it discards the state to avoid redundant
work, otherwise it checkpoints it and puts it on the state
queue.
- eXplode then continues exploring any remaining choices in
the original state S. If it has exhausted all choice
combinations on S it picks a previously saved state off the
state queue and repeats this process on it. This loop terminates
when the state queue is empty or the user loses patience.
(The number of possible states means the former never happens.)
After crash checking, the checked system may have a butchered
internal state. Thus, before continuing,
eXplode restores a clean copy of the current
state without doing crash checking (not pictured).
In addition, since checking all possible crash disks can take too
long, users can set a deterministic threshold: if the number of crash
disks is bigger than this threshold, eXplode checks
a configurable number of random combinations.
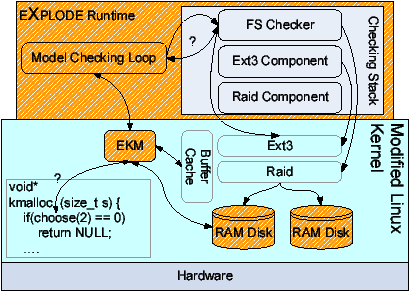
Figure 7: Snapshot: eXplode with Figure 5's checking stack
Figure 7 gives a snapshot of eXplode;
Table 1 breaks down the lines of code for each of the
components.
It consists of two user-level pieces: a client-provided checking stack
and the eXplode runtime, which implements most of the model checking
loop described above. eXplode also has three kernel-level pieces: (1) one or
more RAM disks, (2) a custom kernel module, ekm, and (3) a modified
Linux kernel (either version 2.6.11 or 2.6.15).
eXplode uses ekm to monitor
and deterministically control checking-relevant actions done by kernel
code and record system events needed for crashes. The modified kernel
calls ekm to log system events and when it reaches a choice point.
These modifications add 328 lines of mostly read-only instrumentation
code, typically at function entry or exit. We expect them to generally
be done by eXplode users. Unlike eXplode's user-space code, its RAM disk
driver and ekm are kernel-specific, but are fairly
small and easily ported to a new OS. We recently ported
eXplode's core to FreeBSD, which Section 10 describes in more
detail.
Given all of these pieces, checking works as follows. First, the user
compiles and links their code against the eXplode runtime, and runs the
resultant executable. Second, the eXplode runtime dynamically loads its kernel-level
components and then initializes the storage system. Finally, eXplode
explores the checked system's states using its model checking loop.
While checking a live kernel simplifies many things, the downside is that
many bugs we find with eXplode cause kernel crashes. Thus, we run the
checked system inside a virtual machine monitor (VMware Workstation),
where it can blow itself up without hurting anyone.
This approach also makes checking a non-super-user operation,
with the usual benefits.
| |
Name |
Line Count |
| Linux |
ekm |
1,261 |
| |
RAM disk Driver |
326 |
| |
Kernel Patch |
328 |
| |
ekm-generated |
2,194 |
| BSD |
ekm |
729 |
| |
RAM disk Driver |
357 |
| |
Kernel Patch |
116 |
| User-mode |
eXplode |
5,802 |
| |
RPC Library |
521 |
Table 1: eXplode lines of code (ignoring comments and
blank lines), broken down by modules.
The ekm driver contains
2,194 lines of
automatically generated code (ekm-generated).
The eXplode runtime and the RPC library run
at user-level, the rest is in the kernel. The RPC library is used to check virtual machines (Section 9.3). BSD counts are smaller because
this port does not yet provide all eXplode features.
5 Exploring Choices
eXplode exhausts a choice point by checkpointing the current state S,
exploring one choice, restoring S, and then exploring the other
choices. Below we discuss how eXplode implements checkpoint and restore
by replaying choices (Section 5.1) deterministically
(Section 5.2).
5.1 Checkpointing and restoring states.
A standard checkpoint implementation would copy the current system state
to a temporary buffer, which restore would then copy back. Our previous
storage checking system, FiSC, did just this [30].
Unfortunately, one cannot simply save and restore a kernel
running on raw hardware, so we had to instead run a heavily-hacked Linux
kernel inside FiSC at user level, turning FiSC into a
primitive virtual machine. Doing so was the single largest source of
FiSC complexity, overhead to check new systems, and limitation on
what we could check.
eXplode uses computation rather than copying to recreate states.
It checkpoints a state S by recording the set of choices the checked
code took to reach S. It restores S by starting from a clean
initial state and replaying these choices. Thus, assuming deterministic
actions, this method regenerates S. Mechanically, checkpoint records
the sequence of n choices that produced S in an array; during replay
the ith choose call simply returns the ith entry in this array.
This one change led to orders of magnitude reduction in complexity
and effort in using eXplode as opposed to FiSC, to the degree that
eXplode completely subsumes our prior work in almost every aspect by
a large amount. It also has the secondary benefit that states have a
tiny representation: a sequence of integers, one for each choice point,
where the integer specifies which of N choices were made. Note that
some model checkers (and systems in other contexts [10]) already
use replay-recreation of states, but for error reporting and
state size reduction, rather than for reducing invasiveness.
One problem with the approach is that the restored state's
timestamps
will not match the original, making it harder to check some
time properties.
Naively, it might seem that to reset the checked systems' state we have to
reboot the machine, re-initialize the storage system, mount it, and only
then replay choices. This expensive approach works, but fortunately,
storage systems have the observed, nice property that simply unmounting
them clears their in-memory state, removing their buffer cache entries,
freeing up their kernel data structures, etc. Thus, eXplode uses a faster
method: call the client-supplied unmount to clear the current state,
then load a pristine initial state (saved after initialization) using
the client-supplied mount.
It gets more costly to restore states as the length of their choice
sequence grows. Users can configure eXplode to periodically chop off
the prefix of choice sequences. It does so by (1) calling unmount to force the
checked system state to disk and (2) using the resultant disk image as
a new initial state that duplicates the effect of the choices before the
unmount call. The downside is that it can no longer reorder buffer
cache entries from before this point during crash checking.
5.2 Re-executing code deterministically
eXplode's restore method only works if it can deterministically replay
checked code. We discuss how eXplode does so below, including the
restrictions imposed on the checked system.
Doing the same choices. Kernel code containing a choose call
can be invoked
by non-checking code, such as interrupt handlers or
system calls run by other processes.
Including such calls makes it impossible to replay
traces. eXplode filters them by discarding any
calls from an interrupt context or calls from any process
whose ID is not
associated with the checked system.
Controlling threads. eXplode uses priorities to control
when storage system threads
run (Section 4, bullet 2).
It quiesces storage system threads by giving them the
lowest priority possible
using an ekm ioctl.
It runs a thread by giving it
a high priority (others still have the lowest) and calling the kernel
scheduler, letting it schedule the right thread.
It might seem more sensible for eXplode to orchestrate thread schedules
via semaphores. However, doing so requires intrusive changes
and, in our experience [30], backfires with
unexpected deadlock since semaphores prevent a given thread from running
even if it absolutely must. Unfortunately, using priorities is not
perfect either, and still allows non-deterministic thread interleaving.
We detect pathological cases where a chosen thread does not run, or other
“disabled” threads do run using the “last-run” timestamps in the
Linux process data structure. These sanity checks let us catch when we
generate an error trace that would not be replayable or when replaying
it takes a different path. Neither happens much in practice.
Requirements on the checked system. The checked system must
issue the same choose calls across replay runs. However, many
environmental features can change across runs, providing many sources of
potential non-deterministic input: thread stacks in different locations,
memory allocations that return different blocks, data structures that
have different sizes, etc. None of these perturbations should cause the
checked code to behave differently. Fortunately, the systems we checked
satisfy this requirement “out of the box” — in part because they
are isolated during checking, and nothing besides the checker and their
kernel threads call into them to modify their RAM disk(s).
Non-deterministic systems require modification before eXplode can
reliably check them.
However, we expect such cases to rarely occur. If nothing else, usability
forces systems to ensure that re-executing the same user commands produces
the same system state. As a side-effect, they largely run the same code
paths (and thus would hit the same choose calls).
While checked code must do the same choose calls for deterministic
error replay, it does not have to allocate the same physical blocks.
eXplode replays choices, but then regenerates all different crash
combinations after the last choice point until it (re)finds one that
fails checking. Thus, the checked code can put logical contents in
different physical blocks (e.g., an inode resides in disk block 10 on
one run and in block 20 on another) as long as the logical blocks needed to
cause the error are still marked as dirty in the buffer cache.
6 Checking Crashes
This section discusses crash checking issues: eXplode's checking
interface (Section 6.1), how it generates crash
disks (Section 6.2), how it checks crashes during recovery
(Section 6.3), how it checks for errors caused by
application crashes (Section 6.4), and some
refinements (Section 6.5).
6.1 The full crash check interface
The check_crashes_now() routine is the simplest way to check
crashes. eXplode also provides a more powerful (but complex) interface
clients can use to directly inspect the log eXplode
extracts from ekm. They can also add custom log records.
Clients use the log
to determine what state the checked
system should recover to. They can initiate crash checking at any
time while examining the log. For space reasons we do not
discuss this interface further, though many of our checkers use it.
Instead we focus on two simpler routines check_crashes_start
and check_crashes_end that give most of the power of the logging
approach.
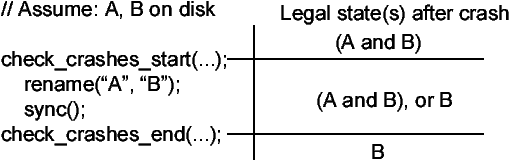
Clients call check_crashes_start before invoking the storage system
operations they want to check and check_crashes_end after.
For example, assume we want to check if we can atomically rename a file
A to B by calling rename and then sync(). We could
write the following code in mutate:
eXplode generates all crash disks that can occur
(inclusively) between these calls, invoking the client's check method
on each. Note how the state the system should recover to changes.
At the check_crashes_start call, the recovered file system should
contain both A and B. During the process of renaming, the
recovered file system can contain either (1) the original A and B
or (2) B
with A's original contents. After sync completes, only B
with A's original contents should exist. This pattern of having an
initial state, a set of legal intermediate states, and a final state is a
common one for checking.
Thus, eXplode makes it easy for
check to distinguish between these epochs by passing a flag that tells
check if the crash disk could occur at the first call (EXP_BEGIN),
the last call (EXP_END), or in between (EXP_INBETWEEN).
We could write a check method to use these flags as follows:
check(int epoch, ...) {
if(epoch == EXP_BEGIN)
// check (A and B)
else if(epoch == EXP_INBETWEEN)
// check (A and B) or B
else // EXP_END
// check B
}
eXplode uses C++ tricks so that clients can pass an arbitrary
number of arguments to these two routines (up to a user-specified limit)
that in turn get passed to their check method.
6.2 Generating crash disks
eXplode generates crash disks by first constructing the current
write set: the set of disk blocks that currently could be
written to disk. Linux has over ten functions that affect whether
a block can be written or not. The following two representative
examples cause eXplode to add blocks to the write set:
-
mark_buffer_dirty(b) sets the dirty flag of a block
b in the buffer cache,
making it eligible for asynchronous write back.
- generic_make_request(req) submits a list of sectors
to the disk queue. eXplode adds these sectors to the write set,
even if they are clean, which can happen for storage systems
maintaining their own private buffer caches (as in the Linux
port of XFS).
The following three representative
examples cause eXplode to remove blocks from the write set:
-
clear_buffer_dirty(b) clears b's dirty
flag. The buffer cache does not write clean buffers to disk.
- end_request(), called when a disk request completes.
eXplode removes all versions of the request's sectors from the
write set since they are guaranteed to be on disk.
- lock_buffer(b), locks b in memory, preventing
it from being written to disk.
A subsequent clear_buffer_locked(b)
will add b to the write set if b is dirty.
Figure 8: Generating all potential crash disks.
Writing any subset of the current write set onto the current disk contents
generates a disk that could be seen if the
system crashed at this moment.
Figure 8 shows how eXplode generates
crash disks; its numbered labels correspond to those
below:
-
As the storage system executes, ekm logs operations that
affect which blocks could be written to disk.
- eXplode extracts this log using an ekm ioctl and
reduces the logged
operations to micro-operations
that add or remove blocks from the write set.
- It then applies these add and remove operations, in order,
to the initial write set.
- Whenever the write set shrinks, it generates all possible
crash disks by applying all subsets of the write set to the
current disk. (Doing so when the write set
shrinks rather than grows makes it trivial to avoid duplicate
work.)
Note that the write set tracks a block's contents in addition to the
block itself. Naively it may appear that when eXplode adds a block b
to the write set it should replace any previous copy of b with this
more recent one. (Our previous work [30] did exactly
this.) However, doing so misses errors. For example, in the figure,
doing so misses one crash disk (B11, B21) since
the second insertion of block B1 replaces the previous version
B11 with B12.
6.3 Checking crashes during recovery
Clients can also use eXplode to check that storage systems correctly
handle crashes during recovery. Since environmental failures are
correlated, once one crash happens, another is not uncommon: power may
flicker repeatedly in a storm or a machine may keep rebooting because
of a bad memory board. eXplode generates the disks that could
occur if recovery crashes,
by tracking the write set produced while running
recover, and then applying all its subsets to the initial crash
disk. It checks these “crash-crash” disks as it would a crash disk.
Note this assumes recovery is idempotent in that if a correct recovery
with no crash produces state Svalid then so should a prematurely
crashed repair followed by a successful one. We do not (but could) check
for further crashes during recovery since implementors seem uninterested
in such errors [30].
6.4 Checking “soft” application crashes
In addition to “hard” machine crashes that wipe volatile state,
eXplode can also check that applications correctly recover from
“soft” crashes where they crashed, but the operating system did not.
Such soft crashes are usually more frequent than hard crashes
with causes ranging from
application bugs to impatient
users pressing “ctrl-C.” Even applications that ignore hard
crashes should not corrupt user data because of a soft crash.
eXplode checks soft crashes in two steps. First, it runs the checker's
mutate method and logs all mutating file system operations it
performs. Second, for each log prefix eXplode mounts the initial disk
and replays the operations in the prefix in the order they are issued.
If the log has n operations eXplode generates n storage states,
and passes each to the check method.
6.5 Refinements
In some cases we remove blocks from the write set
too eagerly. For example, we always remove the sectors associated with
end_request, but doing so can miss permutations since subsequent writes
may not in fact have waited for (depended on) the write to complete.
Consider the events: (1) a file system writes sector S1, (2) the write
completes, (3) it then writes sector S2. If the file system wrote S2
without explicitly waiting for the S1 write to complete then these writes
could have been reordered (i.e., there is no happens-before dependency
between them). However, we do not want to grovel around inside storage
systems rooting out these false dependencies, and conservatively treat
all writes that complete as waited for. A real storage system implementor
could obviously do a better job.
To prevent the kernel from removing buffers from the
write set, we completely disable the dirty buffer flushing threads
pdflush, and only schedule the kernel thread kblockd that
periodically flushes the disk queue between calls to the client mutate
method.
If a checked system uses a private buffer cache, eXplode cannot see all
dirty blocks. We partially counter this problem by doing an unmount
before generating crash disks, which will flush all private dirty buffers
to disk (when eXplode can add them to its write set). Unfortunately, this
approach is not a complete solution since these unmount-driven
flushes can introduce spurious dependencies (as we discussed above).
7 In-Depth Checking: File Systems
This section demonstrates that eXplode's lightweight approach
does not compromise its power by replicating (and sometimes
superseding) the results we obtained with our previous, more strenuous
approach [30]. It also shows eXplode's breadth by
using it to check ten Linux file systems with little incremental effort.
We applied eXplode to all but one of the disk based file systems on
Linux 2.6.11: ext2, ext3, JFS, ReiserFS, Reiser4, XFS, MSDOS,
VFAT, HFS, and HFS+. We skipped NTFS because repairing a
crashed NTFS disk requires mounting it in Windows. For most file
systems, we used the most up-to-date utilities in the Debian “etch”
Linux distribution. For HFS and HFS+, we had to
download the source of their utilities from OpenDarwin [14]
and compile it ourselves. The storage components for these file systems
mirror ext3's component (Section 3.3).
Four file systems use kernel threads: JFS, ReiserFS, Reiser4 and XFS.
We extracted these thread IDs using the same trick as with ext3.
While these file systems vary widely in terms of implementation,
they are identical in one way: none give clean, precise guarantees of
the state they recover to after a crash. As a result, we wrote three
checkers that focused on different special cases where what they did was
somewhat well-defined. We built these checkers by extending a common
core, which we describe below. We then describe the checkers and
the bugs they found.
7.1 The generic checker core
The basic checker starts from an empty file system and systematically
generates file system topologies up to a user-specified number of files
and directories. Its mutate exhaustively applies each of the
following eight
system calls to each node (file, link, directory) in the current
topology before exploring the next:
ftruncate,
pwrite (which writes to a given offset within a file),
creat, mkdir,
unlink, rmdir, link and rename.
For example, if there are two leaf directories, the checker will delete
both, create files in both, etc. Thus, the number of possible choices
for a given tree grows (deterministically) with its size. For file
systems that support holes, the checker writes at large offsets to
exercise indirect blocks. Other operations can easily be added.
For each operation it invokes, mutate duplicates its
effect on a fake “abstract” file system it maintains
privately. For example, if it performs three operations mkdir(/a),
mkdir(/a/b), and sync() then the abstract file system will
be the tree /a/b, which the real file system must match exactly.
The checker's get_sig method returns a canonical version
of this abstract file system. This canonicalization mirrors that
in [30], and uses relabeling to make topologies
differing only in naming equivalent and discards less interesting properties
such as timestamps, actual disk blocks used, etc.
7.2 Check: Failed system calls have no effect
This check does not involve crash-recovery. It checks that if
a file system operation
(except pwrite)
returns an error, the operation has no user-visible effect.
It uses eXplode to
systematically fail calls to the six kernel functions discussed in
Section 3.1. The actual check uses the abstract
file system described in the previous subsection. If a system call
succeeds, the checker updates the abstract file system, but otherwise
does not. It then checks that the real file system matches the abstract one.
Bugs found.
We found 2 bugs in total.
One of them was an unfixed Linux VFS bug we already reported
in [30]. The other
one was a minor bug in ReiserFS ftruncate which can fail
with its job
half-done if memory allocation fails.
We also found that Reiser4 calls panic on memory allocation
failures, and ReiserFS calls panic on disk read failures.
(We did
not include these two undesired behaviors in our bug counts.)
7.3 Check: “sync” operations work
Applications such as databases and mail servers use operating
system-provided methods to force their data to disk in order to prevent
crashes from destroying or corrupting it. Unfortunately, they are
completely at these routines' mercy — there is no way to check they
do what they claim, yet their bugs can be almost arbitrarily bad.
Fortunately, eXplode makes it easy to check these operations. We built
a checker (similar to the one in Figure 2)
to check four methods that force data to disk:
-
sync forces all dirty buffers to disk.
- fsync(fd) forces fd's dirty buffers to disk.
- Synchronously mounted file system: a system call's
modifications are on disk when the call returns.
- Files opened with O_SYNC:
all modifications done by a system call
through
the returned file descriptor are on disk when the call returns.
After each operation completes and its modifications have been forced
to disk, the sync-checker tells eXplode to do crash checking and verifies that
the modifications persist.
Note, neither fsync nor O_SYNC guarantee that
directory entries pointing to the sync'd file are on disk, doing
so requires calling fsync on any directory containing the
file (a legal operation in Linux). Thus, the checker does an fsync
on each directory along the path to the sync'd file, ensuring there is
a valid path to it in the recovered file system.
| FS |
sync |
mount sync |
fsync |
O_SYNC |
| ext2 |
|
X |
X |
X |
| ext3 |
|
|
|
X |
| ReiserFS |
|
X |
|
X |
| Reiser4 |
|
|
|
X |
| JFS |
|
X |
X |
X |
| XFS |
|
X |
|
X |
| MSDOS |
X |
X |
|
X |
| VFAT |
X |
X |
|
X |
| HFS |
X |
X |
X |
X |
| HFS+ |
X |
X |
X |
X |
Table 2: Sync checking results:
X indicates the file
system failed the check. There were 13 bugs, three of which
show up more than once, causing more X marks than errors.
Bugs found. Table 2 summarizes the 13 bugs found
with this checker. Three bugs show up in multiple ways (but are
only counted three times): a VFS limitation caused all file systems to
fail the O_SYNC check, and both HFS and HFS+ mangled
file and directory permissions after crashing, therefore failing all
four sync checks. We describe a few of the more interesting bugs
below.
Besides HFS/HFS+, both MSDOS and VFAT mishandled sync.
Simple crashes after sync can introduce directory loops.
The maintainers confirmed they knew of these bugs, though they had
not been publicly disclosed. These bugs have subsequently been fixed.
Eight file systems had synchronous mount bugs. For example, ext2
gives no consistency guarantees by default, but mounting it synchronously
still allows data loss.
There were two interesting fsync errors, one in JFS
(Section 3.2) and one in ext2. The ext2
bug is a case where an implementation error points out a deeper
design problem. The bug occurs when we: (1) shrink a file “A”
with truncate and (2) subsequently creat,
write, and fsync a second file “B.” If file B
reuses the indirect blocks of A freed via truncate, then following
a crash e2fsck notices that A's indirect blocks are corrupt
and clears them, destroying the contents of B. (For good measure it
then notices that A and B share blocks and “repairs” B by duplicating
blocks from A.) Because ext2 makes no guarantees about what is written
to disk, fundamentally one cannot use fsync to safely
force a file to disk, since
the file can still have implicit dependencies on
other file system state (in our case if it reuses an indirect blocks for
a file whose inode has been cleared in memory but not on disk).
7.4 Check: a recovered FS is “reasonable”
Our final check is the most stringent: after a crash a
file system recovers to a “reasonable” state.
No files, directories, or links flushed to disk are
corrupted or disappear (unless explicitly
deleted). Nor do they spontaneously appear without being created.
For example,
if we crash after performing two operations mkdir(/A) and
mkdir(/A/B) on an empty file system, then there are exactly
three
correct recovered file systems: (1) / (no data),
(2) /A, or (3) /A/B. We should not see
directories or files we never created. Similarly, if /A was
forced to disk before the crash, it should still exist.
For space reasons we only give a cursory implementation overview.
As mutate issues operations, it builds two sets: (1) the stable set,
which contains the operations it knows are on the disk, (2) the volatile
set, which contains the operations that may or may not be on disk.
The check method verifies that the recovered file system can be
constructed using some sequence of volatile operations legally combined
with all the stable ones.
The implementation makes heavy use of caching to prune the search and
“desugars” operations such as mkdir into smaller atomic operations
(in this case it creates an inode and then forms a link to it) to ensure
it can describe their intermediate effects.
Bugs found. We applied this check to ext2, ext3, JFS, ReiserFS and
Reiser4. Unsurprisingly, since ext2 gives no crash guarantees,
files can point to uninitialized blocks, and sync'd files and directories
can be removed by its fsck. Since JFS journals metadata but
not data, its files can also point to garbage. These behaviors
are design decisions so we did not include them in our bug counts.
We found two bugs (one in JFS, one in Reiser4) where crashed disks cannot
be recovered by fsck.
We could not check many topologies for ReiserFS and Reiser4 because
they appear to leak large amounts of memory on every mount
and unmount (Our bug counts do not include these leaks.)
In addition, we used the crash-during-recovery check
(Section 6.3) on Reiser4. It found a bug where
Reiser4 becomes so corrupted that mounting it causes a kernel panic.
(Since our prior work explored this check in detail we did not apply
it to more systems.)
Finally, we did a crude benchmark run by running the checker (without
crash-during-recovery checking) to ext3 inside a virtual machine
with 1G memory on a Intel P4 3.2GHZ with 2G memory. After about 20
hours, eXplode checked 230,744 crashes for 327 different
FS topologies and 1582 different FS operations. The run died because
Linux leaks memory on each mount and unmount and runs out of memory.
Although we fixed two leaks, more remain (we did not count these
obliquely-detected errors in our bug counts but were tempted to).
We intend to have eXplode periodically checkpoint itself so
we can reboot the machine and let eXplode resume from the checkpoints.
8 Even Simple Checkers Find Bugs
This section shows that even simple checkers find interesting bugs by
applying it to three version control systems and the Berkeley DB database.
The next two sections demonstrate that
eXplode works on many different storage systems by applying it to many
different ones. The algorithm for this process: write a quick checker,
use it to find a few errors, declare success, and then go after another
storage system. In all cases we could check many more invariants.
Table 3 summarizes all results.
| System |
Storage |
Checker |
Bugs |
| FS |
744 |
5,477 |
18 |
| CVS |
27 |
68 |
1 |
| Subversion |
- |
- |
1 |
| ExpENSiv |
30 |
124 |
3 |
| Berkeley DB |
82 |
202 |
6 |
| RAID |
144 |
FS + 137 |
2 |
| NFS |
34 |
FS |
4 |
| VMware GSX/Linux |
54 |
FS |
1 |
| Total |
1,115 |
6,008 |
36 |
Table 3: Summary of all storage systems checked. All line counts
ignore comments and whitespace. Storage gives the line count for each system's
storage component, which for
FS includes the
components for all ten file systems.
Checker gives the checker line counts, which for
ExpENSiv includes two checkers.
We reused the FS checker to check RAID, NFS
and VMware.
We wrote an additional checker for RAID.
We checked Subversion using
an early version of eXplode; we have not yet ported its
component and checker.
8.1 Version control software
This section checks three version control systems: CVS,
Subversion [27], and an expensive commercial system we did
not have source code for, denoted as ExpENSiv (its license precludes naming
it directly). We check that these systems meet their fundamental goal:
do not lose or corrupt a committed file. We found errors in all
three.
The storage component for each wraps up the commands needed
to set up a new repository on top of one of the file systems we check.
The checker's mutate method checks out a copy of the
repository, modifies it, and commits the changes back to
the main repository. After this commit completes,
these changes should persist
after any crash. To test this, mutate immediately calls
check_crashes_now() after the commit completes.
The check method flags an error if: (1) the version control systems'
crash recovery tool (if any) gives an error or (2)
committed files are missing.
Bugs found. All three systems made the same mistake. To update
a repository file A without corrupting it, they first update
a temporary file B, which they then atomically rename to A.
However, they forget to force B's contents to disk before the
rename, which means a crash can destroy it.
In addition ExpENSiv purports to atomically merge two repositories into one,
where any interruption (such as crash) will either leave the two original
repositories or one entirely (correctly) merged one. eXplode found a bug
where a crash during merge corrupts the repository, which ExpENSiv's recovery
tool (ExpENSiv -r check -f) cannot fix. This error seems to
be caused by the same renaming mistake as above.
Finally, we found that even a soft crash during a merge corrupts ExpENSiv's
repository. It appears ExpENSiv renames multiple files at the end of
the merge. Although each individual rename is atomic against a soft
crash, their aggregation is not. The repository is corrupted if not all
files are renamed.
8.2 Berkeley DB
The database checker in this section checks that after a crash no
committed transaction records are corrupted or disappear, and no
uncommitted ones appear. It found six bugs in Berkeley DB 4.3 [2].
Berkeley DB's storage component only defines the init method, which
calls Berkeley DB utilities to create a database.
It does not require mount or unmount, and has no threads.
It performs recovery when the database is opened with the DB_RECOVER
flag (in the check method). We stack this component on top of a
file system one.
The checker's mutate method is a simple loop that starts
a transaction, adds several records to it, and then commits
this transaction. It records committed transactions. It calls
check_crashes_start before each commit and check_crashes_end
(Section 6.1) after to verify that there is a
one-to-one mapping between the transactions it committed
and those in
the database.
Bugs found. We checked Berkeley DB on top of ext2, ext3, and JFS.
On ext2 creating a database inside a transaction, while supposedly atomic,
can lead to a corrupted database if the system crashes before the database is
closed or sync is manually called. Furthermore, even with an existing
database, committed records can disappear during a crash.
On ext3 an unfortunate crash while adding a record to an existing
database can again leave the database in an unrecoverable state.
Finally, on all three file systems, a record that was added but never
committed can appear after a crash. We initially suspected these
errors came from Berkeley DB incorrectly assuming that file system
blocks were written atomically. However, setting Berkeley DB to
use sector-aligned writes did not fix the problem. While the errors
we find differ depending on the file system and configuration settings,
some are probably due to the same underlying problem.
9 Checking “Transparent” Subsystems
Many subsystems transparently slip into a storage stack. Given a checker
for the original system, we can easily check the new stack: run the same
checker on top of it and make sure it gives the same results.
9.1 Software RAID
We ran two checkers on RAID. The first checks that a RAID transparently
extends a storage stack by running the file system sync-checker
(Section 7.3) on top of it. A file system's crash
and non-crash behavior on top of RAID should be the same as without it:
any (new) errors the checker flags are RAID bugs. The second checks
that losing any single sector in a RAID1 or RAID5 stripe does not cause data
loss [20]. I.e., the disk's contents were always
correctly reconstructed from the non-failed disks.
We applied these checks to Linux's software RAID [26] levels
1 and 5. Linux RAID groups a set of disks and presents them as a single
block device to the rest of the system. When a block write request is
received by the software RAID block device driver, it recomputes the
parity block and passes the requests to the underlying disks in the
RAID array. Linux RAID repairs a disk using a very simple approach:
overwrite all of the disk's contents, rather than just those sectors
that need to be fixed. This approach is extremely slow, but also hard
to mess up. Still, we found two bugs.
The RAID storage component methods map directly to different options for
its administration utility mdadm. The init method uses
mdadm –create to assemble either two or four RAM disks
into a RAID1 or RAID5 array respectively. The mount method calls
mdadm –assemble on these disks and the unmount
method tears down the RAID array by invoking mdadm –stop.
The recover method reassembles and recovers the RAID array.
We used the mdadm –add command to replace failed disks
after a disk failure. The checking stack is similar to that in
Figure 5.
Bugs found. The checker found that Linux RAID
does not reconstruct the contents of an unreadable sector
(as it easily could) but instead marks the entire
disk that contains the bad sector as faulty and removes it from the
RAID array. Such a fault-handling policy is not so good: (1)
it makes a trivial error enough to prevent the RAID from recovering
from any additional failure, and (2) as disk capacity increases,
the probability that another sector goes bad goes to one.
Given this fault-handling policy, it is unsurprising our checker
found that after two sector read errors happen on different disks,
requiring manual maintenance, almost all maintenance operations
(such as mdadm –stop or mdadm –add) fail with a
“Device or resource busy” error. Disk write requests also fail in this
case, rendering the RAID array unusable until the machine is rebooted.
One of the main developers confirmed that these behaviors
were bad and should be fixed with high priority [4].
NFS synchronously forces modifications to disk before requests
return [23]. Thus, with only a single client modifying an
NFS file system, after a crash NFS must recover to the same file system
tree as a local file system mounted synchronously. We check this property
by running the sync-checker (Section 7.3) on NFS and
having it treat NFS as a synchronously mounted file system. This check
found four bugs when run on the Linux kernel's NFS (NFSv3)
implementation [19].
The NFS storage component is a trivial
15-lines of code (plus a hand-edit of “/etc/exports” to define an
NFS mount point). It provides two methods: (1) mount, which sets up
an NFS partition by exporting a local FS over the NFS loop-back interface
and (2) unmount, which tears down an NFS partition by unmounting it.
It does not provide a recover method since the recover of the
underlying local file system must be sufficient to repair crashed NFS
partitions. We did not model network failures, neither did
we control the scheduling of NFS threads, which could make error replay
non-deterministic (but did not for ours).
Bugs found. The checker found a bug where a client that
writes to a file and then reads the same file through a hard link
in a different directory will not see the values of the first write.
We elide the detailed cause of this error for space, other than noting
that diagnosing this bug as NFS's fault was easy, because it shows up
regardless of the underlying file system (we tried ext2, ext3, and JFS).
We found additional bugs specific to individual file systems
exported by NFS. When JFS is exported over NFS, the link
and unlink operations are not committed synchronously.
When an ext2 file system is exported over NFS, our checker found that
many operations were not committed synchronously. If the NFS server
crashes these bugs can lose data and cause data values to go backwards
for remote clients.
9.3 VMware GSX server
In theory, a virtual machine slipped beneath a guest OS should not
change the crash behavior of a correctly-written guest storage system.
Roughly speaking, correctness devolves to not lying about when a disk
block actually hits a physical disk. In practice, speed concerns make
lying tempting. We check that a file system on top of a virtual machine
provided “disk” has the same synchronous behavior as running without
it (again) using the sync-checker (Section 7.3).
We applied this check to VMware
GSX 3.2.0 [29] running on Linux.
GSX is an interesting case for eXplode: a large, complex commercial
system (for which we lack source code) that, from the point of
view of a storage system checker, implements a block device interface
in a strange way.
The VMware GSX scripting API makes the storage component easy to
build. The init method copies a precreated empty virtual disk
image onto the file system on top of eXplode RAM disk. The mount
method starts the virtual machine using the command vmware-cmd
start and unmount stops it using vmware-cmd stop hard.
The recover method calls vmware-cmd start, which
repairs a crashed virtual machine, and then removes
a dangling lock (created by the “crashed” virtual machine to prevent
races on the virtual disk file).
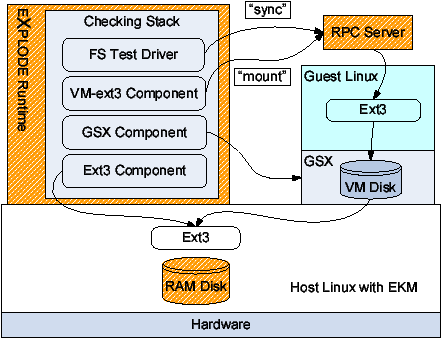
As shown in Figure 9 the checking stack was the most
intricate of this paper. It has five layers, starting from bottom to
top: (1) a RAM disk, (2) the ext3 file system in the host, storing the
GSX virtual disk file, (3) GSX, (4) the ext3 file system in the guest,
(5) the sync-checker. The main complication in building this stack was
the need to split eXplode into two pieces, one running in the host, the
other in the guest. Since the virtual machine will frequently “crash”
we decided to keep the part running inside it simple and make it a
stateless RPC server. The entire storage stack and the sync-checker
reside in the host. When the sync-checker wants to run an operation
in the guest, or a storage method wants to run a utility, they do RPC
calls to the server in the guest, which then performs the operation.
Figure 9: The VMware checking stack.
Bugs found. Calling sync in the guest OS does not correctly
flush dirty buffers to disk, but only to the host's buffer cache.
According to VMware documents, setting the “disable write caching”
configuration flag forces all writes to disk. However, we hit the same
bug even with this flag on. This bug makes it impossible to reliably
run a storage system on top of this VMM on Linux.
We confirmed this problem with one of the main developers who
stated that it should not show up in the latest
version [28].
10 Checking on a new system: FreeBSD
We ported eXplode to FreeBSD 6.0 to ensure porting was easy and to
shake out Linux-specific design assumptions.
We spent most of our time
writing a new RAM disk and ekm module;
we only needed to change a few lines in the user-level runtime
to run on FreeBSD.
The FreeBSD version of eXplode supports crash checking, but currently
does not provide a kernel-level choose nor logging of system calls.
Neither should present a challenge here or in general. Even without
these features, we reproduced the errors in CVS and ExpENSiv we saw on
Linux as well as finding new errors in FreeBSD UFS2. Below, we discuss
issues in writing ekm and the RAM disk.
ekm.
Crash checking requires adding calls to ekm in functions that
mark buffers as clean, dirty, or write them to disk. While a FreeBSD
developer could presumably enumerate all such functions easily, our
complete lack of experience with FreeBSD meant it took us about a week to
find all corner-cases. For example, FreeBSD's UFS2 file system sometimes
bypasses the buffer cache and writes directly to the underlying disk.
There were also minor system-differences we had to correct for.
As an example, while Linux and FreeBSD have similar structures for
buffers, they differ in how they store bookkeeping information (e.g.,
representing offsets in sectors on Linux, and in bytes on FreeBSD).
We adjusted for such differences inside ekm so that eXplode's user-level
runtime sees a consistent interface. We believe porting
should
generally
be easy since ekm only logs
the offset, size, and data of buffer modifications, as well as the
ID of the modifying thread. All of these should be readily
available in any OS.
RAM disk. We built our FreeBSD RAM disk by modifying the
/dev/md memory-based disk device. We expect developers can
generally use this approach: take an existing storage device
driver and add trivial ioctl commands to read and write
its disk state by copying between user- and kernel-space.
Bug-Finding Results. In addition to our quick tests to
replicate the ExpENSiv and CVS bugs, we also ran our sync-checker
(Section 7.3) on FreeBSD's UFS2 with soft updates
disabled. It found errors where fsck with the -p option could
not recover from crashes. While fsck without -p could repair
the disk, the documentation for fsck claims -p can recover from
all errors unless unexpected inconsistencies are introduced by hardware
or software failures. Developers confirmed that this is a problem and
should be further investigated.
11 Related Work
Below we compare eXplode to file system testing, software model checking, and
static bug finding.
File system testing tools. There are many file system testing
frameworks that use application interfaces to stress a “live” file
system with an adversarial environment. These testing frameworks are
less comprehensive than our approach, but they work “out of the box.”
Thus, there is no reason not to both test a file system and then test
with eXplode (or vice versa).
Recently, Prabhakaran et al [21] studied how
file systems handle disk failures and corruption. They developed a
testing framework that uses techniques from [25]
to infer disk block types and then inject “type-aware” block failure
and corruption into file systems. Their results provide motivation for
using existing checksum-based file systems (such as Sun's ZFS [32]).
While their technique is more precise than random testing, it does not
find the crash errors that eXplode does, nor is it as systematic.
Extending eXplode to similarly return garbage on disk reads is trivial.
Software Model Checking. Model checkers have been previously
used to find errors in both the design and the implementation of software
systems [15, 13, 16, 3, 18, 30, 7, 1].
Two notable examples are Verisoft [13], which
systematically explores the interleavings of a concurrent C program,
and Java PathFinder [3] which used a specialized virtual
machine to check concurrent Java programs by checkpointing states.
The model checking ideas eXplode uses — exhausting states, systematic
exploration, and choice — are not novel. This paper's conceptual
contribution is dramatically reducing the large work factor that plagues
traditional model checking. It does so by turning the checking process
inside out. It interlaces the control it needs for systematic state
exploration in situ, throughout the checked system. As
far as we know,
eXplode is the first example of in situ model checking.
The paper's engineering contribution is building a system that exploits
this technique to effectively check large amounts of storage system
code with relatively little effort.
Static bug finding. There has been much recent work on static bug
finding (e.g., [9, 1, 8, 5, 11, 12]).
Roughly speaking, because dynamic checking runs code, it is limited to
just executed paths, but can more effectively check deeper properties
implied by the code (e.g., sync() actually commits data to
stable storage or crash recovery works). The errors we found would
be difficult to get statically. However, we view static analysis
as complementary: easy enough to apply that there is no reason not to
use it and then use eXplode.
12 Conclusion and Future Work
eXplode comprehensively checks storage systems by adapting key ideas from
model checking in a way that retains their power but discards their
intrusiveness. Its interface lets implementors quickly write storage
checkers, or simply compose them from existing components. These
checkers run on live systems, which means they do not have to emulate
either the environment or pieces of the system. As a result, we often
have been able to check a new system in minutes. We used eXplode to find
serious bugs in a broad range of real, widely-used storage systems, even
when we did not have their source code. Every system we checked had bugs.
Our gut belief has become that an unchecked system must have bugs
— if we do not find any we immediately look to see what is wrong with
our checker (a similar dynamic arose in our prior static checking work).
The work in this paper can be extended in numerous ways. First, we
only checked systems we did not build. While this shows eXplode gets good
results without a deep understanding of checked code, it also means we
barely scratched the surface of what could be checked. In the future
we hope to collaborate with system builders to see just how deep eXplode
can push a valued system.
Second, we only used eXplode for bug-finding, but it is equally useful as
an end-to-end validation tool (with no bug fixing intended). A storage
subsystem implementor can use it to double-check that the environment
the subsystem runs in meets its interface contracts and that the
implementor did not misunderstand these contracts.
Similarly, a user can use it to check that slipping
a subsystem into a system breaks nothing. Or use it to pick a working
mechanism from a set of alternatives (e.g.,
if fsync does
not work use sync instead).
Finally, we can do many things to improve eXplode. Our biggest missed
opportunity is that we do nothing clever with states. A big benefit of
model checking is perspective: it makes state a first-class concept.
Thus it becomes natural to think about checking as a state space
search; to focus
on hitting states that are most “different” from those already seen;
to infer what actions cause “interesting” states to be hit; and to
extract the essence of states so that two superficially different ones
can be treated as equivalent. We have a long list of such things
to add to eXplode in the future.
Acknowledgements
We thank
Xiaowei Yang,
Philip Guo,
Daniel Dunbar, Silas Boyd-Wickize, Ben Pfaff, Peter Pawlowski,
Mike Houston, Phil Levis for proof-reading. We thank
Jane-Ellen Long and Jeff Mogul for help with time management.
We especially thank Ken
Ashcraft and Cristian Cadar for detailed comments, Jeremy Sugerman
for his help in reasoning about the GSX error, and Paul Twohey and
Ben Pfaff for help in the initial stages of this project (described
in [31]). We thank Martin Abadi (our shepherd) and the
anonymous reviewers for their struggles with our opaque submission.
This research was supported by National Science Foundation (NSF) CAREER
award CNS-0238570-001 and Department of Homeland
Security grant FA8750-05-2-0142.
0.1
References
- [1]
-
T. Ball and S. Rajamani.
Automatically validating temporal safety properties of interfaces.
In SPIN 2001 Workshop on Model Checking of Software, May 2001.
- [2]
-
Berkeley DB.
https://www.sleepycat.com.
- [3]
-
G. Brat, K. Havelund, S. Park, and W. Visser.
Model checking programs.
In IEEE International Conference on Automated Software
Engineering, 2000.
- [4]
-
N. Brown.
Private communication., Mar. 2005.
- [5]
-
W. Bush, J. Pincus, and D. Sielaff.
A static analyzer for finding dynamic programming errors.
Software: Practice and Experience, 30(7):775–802, 2000.
- [6]
-
E. Clarke, O. Grumberg, and D. Peled.
Model Checking.
MIT Press, 1999.
- [7]
-
J. Corbett, M. Dwyer, J. Hatcliff, S. Laubach, C. Pasareanu, Robby, and
H. Zheng.
Bandera: Extracting finite-state models from Java source code.
In ICSE 2000, 2000.
- [8]
-
The Coverity software analysis toolset.
https://coverity.com.
- [9]
-
M. Das, S. Lerner, and M. Seigle.
Path-sensitive program verification in polynomial time.
In Proceedings of the ACM SIGPLAN 2002 Conference on Programming
Language Design and Implementation, Berlin, Germany, June 2002.
- [10]
-
G. Dunlap, S. T. King, S. Cinar, M. Basrat, and P. Chen.
ReVirt: enabling intrusion analysis through virtual-machine logging
and replay.
In Proceedings of the Fifth Symposium on Operating Systems
Design and Implementation, Dec. 2002.
- [11]
-
D. Engler, B. Chelf, A. Chou, and S. Hallem.
Checking system rules using system-specific, programmer-written
compiler extensions.
In Proceedings of Operating Systems Design and Implementation,
Sept. 2000.
- [12]
-
C. Flanagan, K. Leino, M. Lillibridge, G. Nelson, J. Saxe, and R. Stata.
Extended static checking for Java.
In Proceedings of the ACM SIGPLAN 2002 Conference on Programming
Language Design and Implementation, pages 234–245. ACM Press, 2002.
- [13]
-
P. Godefroid.
Model Checking for Programming Languages using VeriSoft.
In Proceedings of the 24th ACM Symposium on Principles of
Programming Languages, 1997.
- [14]
-
HFS and HFS+ utilities.
https://darwinsource.opendarwin.org/10.2.6/diskdev_cmds-208.11.
- [15]
-
G. J. Holzmann.
The model checker SPIN.
Software Engineering, 23(5):279–295, 1997.
- [16]
-
G. J. Holzmann.
From code to models.
In Proc. 2nd Int. Conf. on Applications of Concurrency to System
Design, pages 3–10, Newcastle upon Tyne, U.K., 2001.
- [17]
-
M. K.
Symbolic Model Checking.
Kluwer Academic Publishers, 1993.
- [18]
-
M. Musuvathi, D. Y. Park, A. Chou, D. R. Engler, and D. L. Dill.
CMC: A pragmatic approach to model checking real code.
In Proceedings of the Fifth Symposium on Operating Systems
Design and Implementation, 2002.
- [19]
-
Linux NFS.
https://nfs.sourceforge.net/.
- [20]
-
D. Patterson, G. Gibson, and R. Katz.
A case for redundant arrays of inexpensive disks.
ACM SIGMOD Conference, pages 109–116, June 1988.
- [21]
-
V. Prabhakaran, L. N. Bairavasundaram, N. Agrawal, H. S. Gunawi, A. C.
Arpaci-Dusseau, and R. H. Arpaci-Dusseau.
Iron file systems.
In Proceedings of the Twentieth ACM Symposium on Operating
Systems Principles, pages 206–220, New York, NY, USA, 2005. ACM Press.
- [22]
-
J. Saltzer, D. Reed, and D. Clark.
End-to-end arguments in system design.
ACM Transactions on Computer Systems, 2(4):277–288, Nov. 1984.
- [23]
-
Sandberg, Goldberg, Kleiman, Walsh, and Lyon.
Design and implementation of the Sun network file system, 1985.
- [24]
-
A simple block driver.
https://lwn.net/Articles/58719/.
- [25]
-
M. Sivathanu, V. Prabhakaran, F. I. Popovici, T. E. Denehy, A. C.
Arpaci-Dusseau, and R. H. Arpaci-Dusseau.
Semantically-smart disk systems.
In Second USENIX Conference on File and Storage Technologies,
2003.
- [26]
-
Linux software RAID.
https://cgi.cse.unsw.edu.au/~neilb/SoftRaid.
- [27]
-
Subversion.
https://subversion.tigris.org.
- [28]
-
J. Sugerman.
Private communication., Dec. 2005.
- [29]
-
VMware GSX server.
https://www.vmware.com/products/server/.
- [30]
-
J. Yang, P. Twohey, D. Engler, and M. Musuvathi.
Using model checking to find serious file system errors.
In Proceedings of the Sixth Symposium on Operating Systems
Design and Implementation, Dec. 2004.
- [31]
-
J. Yang, P. Twohey, B. Pfaff, C. Sar, and D. Engler.
eXplode: A lightweight, general approach for finding serious errors
in storage systems.
In Workshop on the Evaluation of Software Defect Detection
Tools, June 2005.
- [32]
-
Zfs: the last word in file systems.
https://www.sun.com/2004-0914/feature/.
This document was translated from LATEX by
HEVEA.
|