Swift: A Fast Dynamic Packet Filter
Zhenyu Wu Mengjun Xie Haining Wang |
Abstract: This paper presents Swift, a packet filter for high performance packet capture on commercial off-the-shelf hardware. The key features of Swift include (1) extremely low filter update latency for dynamic packet filtering, and (2) Gbps high-speed packet processing. Based on complex instruction set computer (CISC) instruction set architecture (ISA), Swift achieves the former with an instruction set design that avoids the need for compilation and security checking, and the latter by mainly utilizing SIMD (single instruction, multiple data). We implement Swift in the Linux 2.6 kernel for both i386 and x86_64 architectures. The Swift userspace library supports two sets of application programming interfaces (APIs): a BPF-friendly API for backward compatibility and an object oriented API for simplifying filter coding. We extensively evaluate the dynamic and static filtering performance of Swift on multiple machines with different hardware setups. We compare Swift with BPF (the BSD packet filter)—the de facto standard for packet filtering in modern operating systems—and hand-coded optimized C filters that are used for demonstrating possible performance gains. For dynamic filtering tasks, Swift is at least three orders of magnitude faster than BPF in terms of filter update latency. For static filtering tasks, Swift outperforms BPF up to three times in terms of packet processing speed, and achieves much closer performance to the optimized C filters.
A packet filter is an operating system kernel facility that classifies network packets according to criteria given by user applications, and conveys the accepted packets from a network interface directly to the designated application without traversing the network stack. Since the birth of the seminal BSD packet filter (BPF) [14], packet filters have become essential to build fundamental network services ranging from traffic monitoring [12, 21] to network engineering [19] and intrusion detection [20]. In recent years, with dramatically increasing network speed and escalating protocol complexity, packet filters have been facing intensified challenges posed by more dynamic filtering tasks and faster filtering requirements. However, existing packet filter systems have not yet fully addressed these challenges in an efficient and secure manner.
Dynamic filtering tasks refer to on-line packet filtering procedures in which filtering criteria frequently change over time. Typically, when a filtering task cannot fully specify its criteria a priori and the unknown part can only be determined at runtime, the filtering criteria have to be updated throughout the filtering process. For example, many network protocols, such as FTP, RTSP (Real Time Streaming Protocol), and SIP (Session Initiation Protocol), establish connections with dynamically-negotiated port numbers. Capturing the network traffic that uses such protocols requires dynamic filtering. Even with pre-determined filter criteria, quite often it is necessary to use dynamic filtering. For instance, a network intrusion detection system (NIDS) needs to perform expensive deep traffic analyses on suspicious network flows. However, applying such costly procedures to every packet in high volume traffic would severely overload the system. Instead, an NIDS could first apply simple filtering criteria, such as monitoring traffic to and from a honeypot or a darknet only. When suspicious activities are detected, the NIDS can then update its filtering criteria and capture the traffic of suspicious hosts for deep inspection.
As the de facto packet filter on modern UNIX variants, BPF has shown insufficiency in handling both static and dynamic filtering tasks, particularly the latter [4, 7, 10]. A filter update in BPF must undergo three “pre-processing” phases: compilation, user–kernel copying, and security checking. In the compilation phase, the filtering criteria specified by the human-oriented pcap filter language [11] are translated and optimized into the machine-oriented BPF filter program. In the user–kernel copying phase, the compiled filter program is copied into the kernel. Finally, in the security checking phase, the kernel-resident BPF instruction interpreter examines the copied filter program for potentially dangerous operations such as backward branches, ensuring that user-level optimizer errors cannot trigger kernel misbehavior (e.g., infinite loops). Consequently, the whole process of a filter update in BPF induces prolonged latency, which ranges from milliseconds up to seconds depending on criterion complexity and system workload. In high-speed networks, hundreds or even thousands of packets of interest might be missed by BPF during each filter update, effectively leaving a “window of blindness.” Frequent filter updates, often required by a dynamic filtering task, exacerbate the degree of blindness. A “window of blindness” coinciding with the initialization of a new network session can cause serious problems on certain applications such as NIDS, since the beginning of a network connection normally is of particular interest for security analysis [9].
Recent packet filters such as xPF [10] and FFPF [4] move more packet processing capabilities from userspace into the kernel, which reduces context switches and improves overall performance. However, neither filter works well for dynamic filtering tasks. Because xPF uses the BPF-based filtering engine, it offers no improvement on filter update latency. FFPF attempts to solve this problem by using kernel space library functions, called external functions, which are pre-compiled binaries for specific functionalities such as parsing network protocols and updating states. The use of external functions increases filtering speed and eases extensibility, but also increases programming complexity. External functions, unlike safety-checked BPF filters, have access to the kernel’s full privileges. New external functions should thus be carefully examined for potential security bugs, making them a poor fit for frequently-changing dynamic filtering tasks.
In this paper, we propose Swift, a packet filter that takes an alternative approach to achieving high performance, especially for dynamic filtering tasks. Like BPF, Swift is based on a fixed set of instructions executed by an in-kernel interpreter. Unlike BPF, Swift is designed to optimize filtering performance with powerful instructions and a simplified computational model. Swift’s instruction set is able to accomplish common filtering tasks with a small number of instructions. These powerful instructions of Swift resemble those in CISC ISAs and support optimizations analogous to SIMD (single instruction, multiple data). Running on the powerful instructions, Swift attains static filtering speedup due mainly to SIMD extension and hierarchical execution optimization, a special runtime optimization technique for avoiding redundant instruction interpretation. More importantly, combining the powerful instructions with the simplified computational model, Swift removes filter compilation and security checking in filter update, and thus significantly improves dynamic filtering performance in terms of filter update latency.
We implement Swift in the Linux 2.6 kernel for both i386 and x86_64 architectures. The kernel implementation of Swift is fully compatible and can coexist with LSF (Linux Socket Filter), “a BPF clone” in Linux. The Swift userspace libraries provide a BPF-friendly application programming interface (API) with textual filter syntax for backward compatibility, and an object-oriented API that simplifies filter coding. To validate the efficacy of Swift, we conduct extensive experiments on multiple machines with different hardware setups and processor speeds. We compare the performance of Swift with that of LSF and optimized C filters. These C filters are used for demonstrating the possible performance gains obtainable by optimized binary code. For dynamic filtering tasks, Swift achieves at least three orders of magnitude lower filter update latency than LSF, and reduces the number of missing packets per connection by about two orders of magnitude in comparison with LSF. For static filtering tasks with simple filtering criteria, Swift runs as fast as LSF; but with complex filtering criteria, Swift outperforms LSF up to three times in terms of packet processing speed, and performs much closer to the optimized C filters than LSF.
The remainder of this paper is structured as follows. Section 2 surveys related work on packet filters. Section 3 details the design of Swift. Section 4 describes the implementation of Swift. Section 5 evaluates the performance of Swift. Section 6 concludes the paper.
The CMU/Stanford Packet Filter (CSPF) [16], a kernel-resident network packet demultiplexer, introduces the packet filter concept. CSPF provides a fast path, instead of the normal layered/stacked path, for network packets to reach their destined userspace applications. Thus, the literal meaning of filtering in CSPF is delayered demultiplexing [25]. The original motivation behind CSPF is to facilitate the implementation of network protocols such as TCP/IP at userspace. Although the purposes and techniques vary in subsequent packet filters, the CSPF model of kernel-resident and protocol-independent packet filtering is inherited by all its descendants.
BPF [14] aims to support high-speed network monitoring applications such as tcpdump [11]. User applications inform the in-kernel filtering machine of their interests through a predicate-based filtering language [15], and then receive from BPF the packets that conform to filtering criteria. To achieve high performance, BPF introduces in-place packet filtering to reduce unnecessary cross-domain copies, a register-based filter machine to fix the mismatch between the filter and its underlying architecture, and a control flow graph (CFG) model to avoid unnecessary computations. BPF+ [3] further enhances the performance of BPF by exploiting global data-flow optimization to eliminate redundant predicates across filter criteria and employing just-in-time compilation to convert a filtering criterion to native machine code. xPF [10] increases the computation power of BPF by using persistent memory and allowing backward jumps.
In response to tcpdump’s inefficiency at handling dynamic ports, a special monitoring tool mmdump [24] has been developed to capture Internet multimedia traffic, in which dynamic ports are widely used. mmdump reduces the cost of compilation by exploiting the uniformity of its filtering criterion patterns. A customized function in mmdump assembles new filtering criteria by using pieces of pre-compiled criterion blocks preserved from the initial filter compilation. Swift’s high-level SIMD instructions and hierarchical instruction optimization can be viewed as a generalization of this technique, but Swift’s techniques apply to any type of filter and require no special compiler techniques.
MPF (Mach Packet Filter) [26], PathFinder [2], and DPF (Dynamic Packet Filter) [8] are filters designed to demultiplex packets for user-level networking. To efficiently demultiplex packets for multiple user-level applications and to dispatch fragmented packets, MPF extends the instruction set of BPF with an associative match function. With the same goal of achieving high filter scalability as MPF, PathFinder, abstracts the filtering process as a pattern matching process and adopts a special data structure for the abstraction. The abstraction makes PathFinder amenable to implementation in both software and hardware and capable of handling Gbps network traffic. DPF utilizes dynamic code generation technology, instead of a traditional interpreter-based filter engine, to compile packet filtering criteria into native machine code. DPF-like dynamic code generation could improve Swift’s performance on static filtering tasks.
The Fairly Fast Packet Filter (FFPF, later renamed as Streamline) [4] is the most recent research on packet filtering. Unlike traditional packet filters such as BPF, FFPF is a framework for network monitoring. Within the framework of FFPF, multiple packet filtering programs can be simultaneously loaded into the kernel. The processing flow among these programs is organized as a directed graph. In comparison to the filtering architecture of BPF, FFPF can significantly reduce the cost of packet copying for multiple concurrent filtering programs by using flow group, shared circular buffers, and even hardware (e.g., Network Processing Unit). Therefore, FFPF achieves far greater scalability than BPF. FFPF expands filter capacity via external functions, which are essentially native code running in kernel space. In addition, FFPF features language neutral design and provides backward compatibility with BPF.
FFPF and Swift are complementary as they target quite different problems. FFPF focuses on the packet filtering framework and its main contribution lies in the improvement of scalability for supporting multiple concurrent monitoring applications, while Swift aims at the packet filtering engine and provides a fast, flexible, and safe filtering mechanism for individual applications. By virtue of the language neutral design of FFPF, Swift can be implemented within the FFPF framework, taking maximal advantage of both designs.
Besides software-based packet capture solutions, multiple hardware-based solutions [5, 18] have been proposed to meet the challenge posed by extremely high speed networks. Specifically, FPGAs and ASICs have been widely used in recent intrusion detection and prevention systems [9, 22]. Moreover, other than the packet-filter-based network monitoring architecture, there exist many specialized-architecture monitoring systems such as OC3MAN [1], Windmill [13], Nprobe [17], and SCAMPI [6]. Even with these hardware or specialized system solutions, packet filtering still plays a major role in network monitoring and measurement due to its simplicity, universal installation, high cost-effectiveness, and rich applications.
In this section, we first present the motivation of Swift and its design overview, then we detail the design of Swift, including its unique ISA, and finally we analyze the characteristics of Swift in terms of performance and security.
The inefficiency of BPF observed in our past experiences directly motivated Swift’s design. The most significant performance degradation of BPF occurs in dynamic filtering tasks. This degradation is mainly caused by frequent filter updates. As mentioned above, the unduly long filter update latency in BPF is attributed to three filter pre-processing operations: filter re-compilation, user–kernel copying, and security checking. While the latter two play non-negligible roles in the long delay, the majority of the latency is introduced by filter re-compilation [7, 24]. The duration of a filter update in BPF would be significantly shortened if the re-compilation were selectively performed only on the changed primitive, or totally skipped, as mmdump accomplishes for selected filtering tasks. However, for general purpose network monitoring tasks, re-compiling the entire BPF filter is inevitable for each update, because its instruction set architecture and filter program organization are not suitable for fast update.
BPF uses a RISC-like instruction set for a low-level register machine abstraction. Thus, each pcap language primitive is translated into an instruction block that comprises a variable number of simple instructions. Changing a primitive in a filter often alters the size of the corresponding instruction block. Without re-compiling, we need to modify code-offset-related instructions (e.g., conditional branch) throughout the entire compiled filter to accommodate the change. Control flow optimization, which is indispensable for BPF to speed up filter execution, makes the matter even worse. The BPF control flow optimization merges multiple identical instructions into one. This significantly reduces both filter program size and execution time, but complicates updates to instructions shared by several primitives.
In addition to filter update latency, we also find that the filter execution efficiency of BPF can be improved substantially. The RISC-like ISA in BPF induces high instruction interpretation overhead. Interpretation overhead refers to the operations an interpreter must perform before executing an actual filter instruction, such as program counter maintenance, instruction loading, operation decoding, and so forth. Those operations are unproductive towards evaluating filter criteria, but cannot be omitted. Because each BPF instruction accomplishes merely a very simple task, such as loading, arithmetic, and conditional branching, most of the CPU time in executing a BPF program is spent uselessly as interpretation overhead, and the CPU time spent in evaluating the actual packet filtering criteria only makes up a small fraction of the total. Our measurement results (detailed in Section 5.2) show that the BPF interpretation overhead is about 5.2 nanoseconds on average in a machine with Intel 64-bit Xeon 2.0GHz CPU, and makes up nearly 56% of the average instruction execution time.
BPF’s continuing widespread use can be mainly attributed to (1) the generic pseudo-machine abstraction, which guarantees cross-platform compatibility, and (2) its natural-language-like, primitive based filter language, which ensures ease of use to application developers and network administrators. Therefore, we decide to inherit from BPF the pseudo-machine abstraction and language primitives, while developing our own filtering model to achieve significant performance improvement.
The primary objective of Swift is to achieve low filter update latency. Our approach to reaching this goal is by reducing filter criterion pre-processing on filter update as much as possible. More specifically, we attempt to avoid filter re-compilation and optimization, allow “in-place” filter updating, and eliminate security checking.
To achieve “compilation free” update, filtering criteria must map directly onto interpreter instructions. This makes a high-level, CISC-like instruction set architecture a natural choice for Swift. In addition to saving compilation time, the CISC-like instruction set also opens a door for performance optimization. A complex Swift instruction is able to accomplish the same task as several simple BPF instructions, thereby reducing instruction interpretation overhead.
Two design choices are made to enable in-place filter modification: fixing instruction length and removing filter optimization. By fixing the instruction length, we avoid the need to shift instructions on instruction replacement. By removing filter optimization, not only do we save precious time during a filter update, but also preserve one-to-one mapping between filtering primitives and filter program instructions: no instructions are shared. As a result, updates to a filter can be directly applied to the affected instructions without altering other instructions or filter program structure. This feature further helps to optimize filter update by reducing unnecessary user–kernel data copying. Only the updated part of a filter criterion is copied from userspace to the kernel.
A simplified computational model ensures filter program safety for Swift without security checking. With the specialized ISA, each Swift instruction is able to perform a set of complex pattern matching operations. The execution path of a filter program is determined by the Boolean evaluation result of each instruction: either continue (“true”) or abort (“false”). Therefore, Swift does not need storage or branch instructions to control the execution path of a filter program. With a fixed set of instructions, acyclic execution path, and zero data storage, any Swift filter program is safe to run in the kernel.
Our secondary objective is to increase filter execution efficiency. We achieve this goal by exploring the following two optimizations: SIMD expansion to the Swift instruction set and hierarchical execution optimization. SIMD allows an interpreter to perform a single instruction interpretation and apply the same operation on many sets of data, thereby significantly reducing the cost of instruction interpretation. SIMD has been widely used in contemporary high performance processors, such as Intel Pentium series and IBM Power series processors. While Swift’s design ensures low filter update latency, it also forfeits the benefit associated with filter program optimization. To offset the possible performance loss, we introduce an alternative optimization method called hierarchical execution optimization. This optimization is based on our observation that during a dynamic filtering process, the newly-added primitives are often related to some existing ones. For example, the new primitives quite often monitor the same host but on different ports or capture the same protocol traffic but for different hosts. Therefore, the existing primitives can be viewed as the “parent” of the new primitives. Swift utilizes this hierarchical relationship among primitives to avoid redundant instruction executions. Instead of actively optimizing filter programs, i.e., performing automatic optimization in filter update, Swift makes the primitive hierarchy a hint for the filter execution engine, and leaves applications responsible for constructing the hierarchy.
The Boolean logic in a Swift filter is organized in disjunctive normal form. Figure 1 (b) illustrates the control flow organization of Swift, while the control flow graph of BPF, which is semantically equivalent, is shown in Figure 1 (a) for comparison. In the Swift control flow organization, each disjunct cluster—the rounded rectangle with shaded background—specifies a complete set of primitives that a packet must satisfy in order to be accepted by the Swift filter. In Swift, we name such a disjunct cluster a Pass, meaning a “passage” of packets.
A pass consists of one or more literals. In a BPF filter, a literal corresponds to a pcap language primitive. Swift inherits the primitives from BPF. However, instead of realizing a primitive with multiple simple instructions, Swift maps each type of primitives into a pseudo-machine instruction—the basic building block of a filter program. Figure 2 illustrates the structure of a Swift filter.
All Swift instructions have the same size, facilitating fast instruction modification on filter update. The Swift instruction layout is shown in Figure 3, where one 32-bit command field is followed by seven 32-bit parameter fields. Such a nicely-aligned 32-byte structure ensures efficient memory accesses.
We formulate our instruction set based on BPF primitives. We first classify BPF primitives into two categories according to their addressing modes. “Direct addressing” primitives, such as “ether proto” and “ip src host,” fetch data from an absolute offset in a packet. “L1 indirect addressing” primitives, such as “tcp dst port,” address data by calculating the variable header length of a protocol layer and adding a relative offset to it. We then generalize the manipulation and comparison operations used in the semantics of BPF primitives. There are three types of basic operations: (1) test if equal, (2) mask and test if equal, and (3) test if in range. Each type also has some variations on operand width (short or long integer). Finally, we design the complex instructions to accomplish the corresponding operations. We come up with 14 different operations that, alone or by combination, are able to perform equivalent operations of any BPF primitives except “expr, ” which involves arbitrary arithmetic.
To further exploit the CISC architecture and enhance performance, we introduce a new addressing mode, “L2 indirect addressing,” with four additional instructions. In the new addressing mode, filtering operations address data by first performing “L1 indirect addressing” to retrieve the related information, which is used to calculate the variable header length of a deeper layer, and then adding the relative offset. While BPF does not provide such primitives, there are practical demands such as filtering based on TCP payload. Moreover, we add four more “power instructions” that perform equivalent operations of several frequently-used BPF primitive combinations, such as “ip src and dst net” and “tcp src or dst port.” Therefore, in total Swift has 22 different types of instructions.
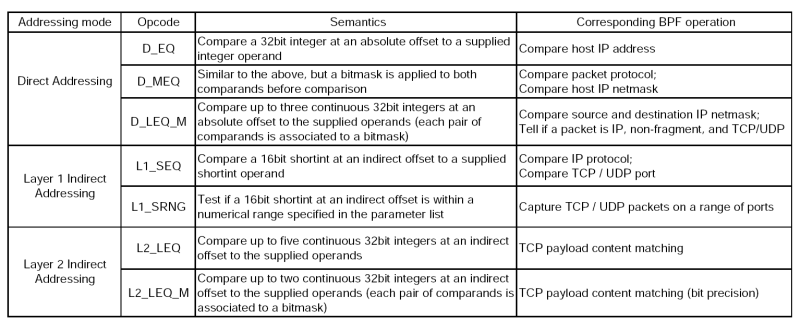
Table 1 lists a selection of Swift instructions, which captures the characteristics of Swift’s CISC-like ISA. The four columns from leftmost to rightmost refer to the addressing mode, the instruction type, the instruction functionality, and the equivalent BPF operation(s), respectively. Swift instructions are fairly generic in that given different parameters, one Swift instruction can function as several different pcap language primitives. Examples are given in the fourth column. Based on the Swift instruction set, we can derive alternative faster implementations for some BPF primitives. For instance, the “ip and tcp port” primitive in BPF requires three initial steps with six instructions to examine whether a packet is IP, non-fragment, and TCP. In Swift, we can take advantage of the “continuous masked comparison” instruction (D_LEQ_M), to perform the same examination in a single instruction.
We add the SIMD feature into the Swift instruction set by packing additional operands into unused parameter fields. For instance, the “Direct addressing load, test if equal” instruction (D_EQ) uses only one 32-bit operand. In contrast, the SIMD version of this instruction can carry up to six additional operands, and the corresponding operation becomes “Direct addressing load, and test if equal to any of P[1] through P[7].”
A series of instructions connected by logic “AND” form a pass. When a packet arrives, the instructions of a pass are evaluated one by one. If all evaluation results are “true,” the packet is accepted and copied to userspace. Otherwise, if any evaluation result is “false,” the packet fails the current pass, and will be tested by remaining passes or dropped if it fails all passes. Passes are thus effectively independent and are combined by logic “OR.”
We achieve the hierarchical execution optimization feature by establishing hierarchical relationships among passes. When a Swift filter is initially set, the passes it contains are created by the application from scratch. In subsequent changes, if a new pass is related to one of the existing passes, the application is entitled to add the new pass by duplicating an existing pass and modifying the copy, or “child” pass. Performing duplication, instead of creating a pass afresh, has two benefits. First, the application saves time in updating the criterion—only the difference between the old and new control flows needs to be updated. Second, the parent–child relationship is noted by the filtering engine and is used to optimize filter execution.
When a pass is added by duplication, Swift makes a bit-exact copy of the parent pass and then marks all the instructions of the child pass as “copied,” a hint for the filtering engine that the marked instruction is exactly the same as the corresponding one in its parent pass. When an instruction in the child pass is later modified, the associated “copied” mark is removed. To evaluate a Swift filter, the filtering engine traverses the passes according to their hierarchical relationships (if any) in a depth-first manner. A parent pass is evaluated before its children. If the parent pass succeeds, then, as for any pass, the filtering engine halts. Otherwise, Swift records those instructions that succeeded. When evaluating child passes, Swift need not re-execute any copied instruction that succeeded in the parent.
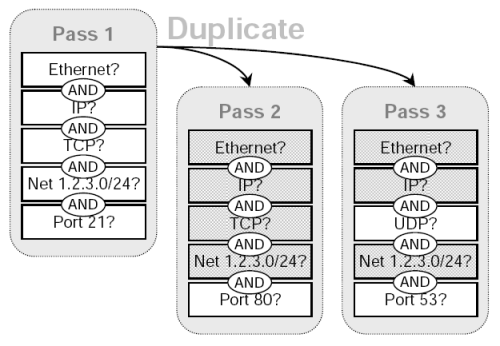
Figure 4 illustrates an example of the pass relation in a Swift filter. Pass 1 is created from scratch, while the other two passes are added by duplicating pass 1. The instructions bearing the “copied” mark have shaded background, so the filtering engine may skip their evaluations.
Before giving detailed analysis of Swift in terms of performance and security, we first summarize the shared design principles of Swift with other packet filters, especially BPF, as well as its unique design features that distinguish Swift from other packet filters. The shared features are marked with “+,” and the unique ones marked with “⋄.”
The performance superiority of Swift mainly origins from two aspects: high filter execution efficiency and low filter update latency.
Using a complex instruction set and SIMD benefits static filtering performance. Thanks to the capability of aggregating multiple simple operations into one instruction, a Swift program has much fewer instructions than its BPF counterpart. As a result, even though its per-instruction interpretation overhead is slightly higher than that of BPF, Swift achieves much lower interpretation overhead of an entire filter program. While the filter engine size of Swift (24KB) is much larger than that of BPF (6KB), our experimental results show that the larger code size has insignificant impact on performance. Even running Swift on the CPU with only 12KB L1 cache (“PC1” in our experiment setup), there is still no observable performance degradation indicating cache thrashing.
Swift’s superior dynamic filtering performance is mainly attributed to its very low filter update latency. For a filtering program with N primitives and experiencing M changes per update, the three pre-processing phases in BPF—recompiling the entire filter, copying the whole compiled filter code to the kernel, and security checking—all take O(N) runtime. However, performing the same filter update in Swift involves neither compilation nor security checking. The only required operations, mapping the changed primitives into instruction opcodes and parameters, and copying the modified instructions into kernel, take O(M) runtime. Because the filter update in Swift is only related to the number of changes per update (M), not to the complexity of the existing filter (N), its filter update latency can be substantially lower than that of BPF, especially when N is large (i.e., the filtering criteria are complicated). Furthermore, hierarchical execution optimization can avoid performance degradation caused by redundant filter instructions.
Security, and filter code safety in particular, have always been a concern in packet filter design. Since modern packet filters execute in kernel space, without proper code safety checking, a faulty filter program containing infinite loops, wild jumps, out-of-bound array indexes, etc., could lead to unpredictable results. In addition, a maliciously crafted filter program can bypass any user-level access protection and can seriously undermine system security.
Depending on the design model, different packet filters have different mechanisms to enforce the security of the filter programs. The FFPF filter languages allow memory allocation, and hence, FFPF has compile-time checks to control resource consumption and run-time checks to detect array boundary violations. In contrast, BPF only needs to perform a security check in the kernel just before the filter program is attached; any program containing backward or out-of-bound jumps or illegal instructions is rejected. However, Swift enforces security in its design and eliminates the necessity for run-time security checks. Swift trades off some of its computational power, i.e., arbitrary data manipulation, for simpler computational model. Because any Swift program is an acyclic DFA (deterministic finite-state automaton), the interpreter is always in a pre-determined state, the execution of a finite-size filter program is always bounded, and Swift requires no security check at all.
Two rationales justify this design tradeoff. First, the reduction of computational power is harmless in the context of packet filtering. A packet filter is a very specific system tool with a well defined set of operations. PathFinder [2] shows that all operations in packet filtering can be generalized as pattern matching. The pcap filter language uses the special primitive “expr” to support arbitrary data manipulation. However, this primitive is rarely used in practice, because its main usage is to specify uncommon filtering criteria that are not covered by regular primitives. Second, BPF’s support for arbitrary data manipulation comes with a high cost of its performance. Instead of following BPF’s strategy, we apply the strategy of “optimize for the common case and prepare for the worst” in Swift’s design.
BPF does not differentiate predefined and arbitrary data manipulation operations. Instead, BPF executes any data manipulation by breaking it down to multiple elementary operations. Thus, BPF wastes a significant amount of time in interpretation, and sometimes it takes longer time to interpret an instruction than to execute it. Swift supports well defined and commonly used data manipulations by incorporating each variant in a single instruction, and integrating their implementations into the filtering engine. Since those operations are carried out by native binary code, Swift achieves very high execution efficiency. Swift cannot perform data manipulations that are not defined in its instruction set. Instead, the user applications need to carry out the custom data manipulations by themselves. However, in case an unsupported data manipulation is desperately needed, for example, when a new protocol requires a different data manipulation, we can always add new instructions to Swift.
We have implemented the Swift kernel engine and userspace libraries in Linux 2.6. Currently we provide implementations for both i386 and x86_64 architectures, and we plan to port Swift to other open-source UNIX variants such as FreeBSD in the future.
Swift coexists with the Linux kernel’s LSF (Linux Socket Filter). LSF is the module equivalent to BPF in BSD UNIX and the default packet filtering module for the widely used libpcap library. Our implementation requires little modification to the existing kernel code, and is compatible with the existing packet filtering framework. Swift’s user–kernel communication mechanism uses the setsockopt() system call. Swift filter programs are attached to the same kernel data structure sk_filter as LSF filter programs, with a flag set to tell two kinds of programs apart. Packets captured by Swift and LSF share the same delivery path no matter which packet filter is being used.
Table 2: Selection of libswift APIs
Routine Functionality SPF_Open Create and attach an empty Swift filter to a socket SPF_NewPass Create a new pass in the Swift filter SPF_DelPass Remove a pass from the Swift filter SPF_DupPass Create a copy of a given pass SPF_SelectOp Assign a predefined operation (equivalent to a pcap language primitive) to an instruction of a given pass SPF_AddParam Add an additional (SIMD) parameter to an instruction in the given pass SPF_DelParam Remove a given parameter from an instruction in the given pass SPF_PokeInst Change an arbitrary part of an instruction in the given pass
The libpcap library provides a set of well-designed routines for setting filter programs and processing packets, as well as utility functions for handling devices and dumping captured packets. Instead of hacking libpcap to incorporate Swift, we developed a set of complementary libraries. Applications based on Swift can seamlessly use those libpcap functions that are unrelated to filter setting, but must invoke a separate mechanism to communicate with the Swift filter engine for filter program installation and update.
Table 3: A filter expressed by pcap, Swift, and LSF
Filtering criterion by pcap ip src net 192.168.254.0/24 and tcp dst port 23 Swift filter program Pass.Inst(0)→EtherIP_TCP_NonFrag() Pass.Inst(1)→Ether_IPSrc(0xFFFFFF00, 0xC0A8FE00) Pass.Inst(2)→EtherIP_TCUDPDst(23) LSF filter program (00) ldh [12] (01) jeq #0x800 jt 2 jf 13 (02) ld [26] (03) and #0xffffff00 (04) jeq #0xc0a8fe00 jt 5 jf 13 (05) ldb [23] (06) jeq #0x6 jt 7 jf 13 (07) ldh [20] (08) jseq #0x1fff jt 13 jf 9 (09) ldxb 4*([14]&0xf) (10) ldh [x + 16] (11) jeq #0x17 jt 12 jf 13 (12) ret #96 (13) ret #0
As shown in Table 2, the C library libswift provides a set of function APIs for the convenient manipulation of Swift filter programs. We also implement a C++ library ooswift, providing object-oriented filter program control and manipulation and improved debugging support. Table 3 shows a common filtering criterion expressed in pcap primitives, in Swift using ooswift and in compiled LSF code. The table illustrates the clear logical connection and easy transformation between the Swift filter program and the pcap language primitives.
In this section, we evaluate the performance of Swift on both dynamic and static filtering tasks and compare it with that of LSF and C kernel filters. The C kernel filters (“Opt-C” for short in the following) are hand-coded, compiled (using gcc “-O2” option) C programs that provide some indication of possible performance gains obtainable by non-interpreted binary code. Each C kernel filter is coded for a specific filtering task. We use the performance of Opt-C filters as an approximation to the performance of FFPF filters. An FFPF filter written in FPL-3, which is FFPF’s native language, is first transformed into a C program and compiled into native code by gcc, and then loaded as a kernel module for use. Since both FPL-3 filters and our Opt-C filters run inside the kernel natively and only a single filter program runs in each experiment, the performance difference between FFPF filters and Opt-C filters should be minimal.
Swift, LSF, and Opt-C filters share the same filtering framework and only differ in filtering engine. Therefore, we use the number of CPU cycles spent by the filtering engine as the micro-benchmark metric. This metric is computed by taking the difference of the x86 Time-Stamp Counter (TSC) just before and right after a specific filter operation. For dynamic filtering tasks, the operation is filter update, while for static filtering tasks, the operation is filter evaluation. In order to compare filter performance across different platforms, we further convert CPU cycles into clock time based on the corresponding machine’s processor frequency.
To evaluate the filters in a realistic but controllable environment, we set up a testbed using a Gbps SMC managed switch to connect four different machines. We use the mirror function of the switch to redirect the traffic on the specified source port to the mirror port. The packet generator machine (PCS) connected to the source port replays traces, and one of the other three machines (PC1–3) connected to the mirror port captures the replayed traffic as a monitoring device. The four machines (PCS and PC1–3) have different generations of processors ranging from Pentium 4 32-bit to the latest Xeon dual core 64-bit. The configurations of these machines are listed in Table 4.
We use the task of capturing FTP passive mode traffic, a typical dynamic filtering task, to measure the performances among Swift, LSF, and Opt-C filters. We developed an application called FTPCap to monitor FTP traffic and collect performance statistics. Three variants that use Swift, LSF, or Opt-C are called FTPCap-Swift, FTPCap-LSF, and FTPCap-Opt-C, respectively.
In passive mode FTP, the server port of a control connection is fixed (usually 21), but the server ports of data connections are dynamically assigned. FTPCap-LSF initially employs “(ip and tcp port ftp)” to capture FTP control packets. When a control packet containing the port number for a new data connection is captured, the server IP address and port number for the new connection will be recorded, and FTPCap-LSF will generate a new criterion similar to “(ip and tcp port ftp) or (ip x1 and (tcp port y1 or tcp port y2)) or (ip x2 and (tcp port y3 or tcp port y4)),” in which “x1” and “x2” refer to the server IP addresses and “y1 …y4” refer to the port numbers. The LSF optimizer performs better when the port numbers of the same server are grouped together. Correspondingly, FTPCap-Swift initializes the first pass with the criterion “(ip and tcp port ftp)” to capture FTP control packets. When a data connection setup event is detected, FTPCap-Swift either simply includes the new port number in the corresponding pass if the server is already observed, or adds a pass using hierarchical execution optimization otherwise. FTPCap-Opt-C, unlike the previous two, has no code for filter setting and updating because the work is already taken by the Opt-C filter. It simply turns on/off the Opt-C filter.
The FTP traffic trace is obtained in a LAN environment. We set up 10 FTP servers with different IP addresses. For each server we make 20 concurrent passive-mode file transfer connections, which are initiated one by one. In other words, at maximum there are 200 concurrent passive FTP data connections. This trace lasts 45 seconds with 3,948 packets per second (pps) on average. In addition, we emulate the scenario of monitoring FTP packets under high-rate background traffic by mixing the captured FTP traffic with a constant high-rate (500 Kpps) non-FTP background traffic. The background traffic is generated by using tcpreplay [23] to play back a large trace file, which is captured at the edge gateway of our campus network.
Besides using filter update latency as the micro-benchmark performance metric, we also use the number of missing packets per data connection as the macro-benchmark performance metric. The missing packets refer to those packets that are not captured by FTPCap at the beginning of a newly-established data connection. The packet miss is caused by the filter update latency being larger than the FTP client acknowledgment delay—the interval between the time when the client receives the port assignment message and the time when the client starts to communicate with the server on that port. The metric is derived by counting the number of the transmitted packets (including TCP control packets) prior to the first packet captured by FTPCap, based on the offline analysis of the replayed trace.
We run FTPCap-LSF and FTPCap-Swift 20 times each on PC1–3, 10 times with the FTP traffic trace replayed and the other 10 times with the mixed traffic trace replayed. We take the median of 10 experimental results as the final result. FTPCap-Opt-C is also tested. Because there is no filter update at userspace, its filter update latency is zero and no packet is missed by FTPCap-Opt-C for either FTP traffic or mixed traffic. Therefore, we focus on the performance comparison between LSF and Swift.
Figures 5 and 6 show how filter update latency changes with an increase in concurrent data connections for LSF and Swift, respectively. The thick and thin curves show the filter update latencies for the traces with no background traffic and with 500 Kpps background traffic, respectively. The most significant difference between Figures 5 and 6 lies in the scale of the y-axis. While the filter update latency for LSF is on the order of milliseconds (ms), the filter update latency for Swift is only on the order of microsecond (µs). By eliminating filter compilation and security checking, Swift gains at least three orders of magnitude speedup against LSF in filter update. Over 99% of LSF’s latency is caused by user-level filter recompilation, but the remaining user–kernel copy and security check latency is still much larger than Swift’s entire update latency. For example, the user–kernel copy and security check latency on PC3 grows from 10µs to 20µs in the experiment. FTPCap running on PC2 does not capture all control packets that carry dynamic port information under mixed traffic, which results in incomplete thin curves in “PC2-LSF” and “PC2-Swift.” The missing critical control packets are mainly due to PC2’s insufficient processing capacity.
As shown in Figure 5, both concurrent connections and background traffic affect the filter update latency of LSF. When the number of concurrent connections increases, the filtering criterion expressed in pcap language becomes longer. And the compilation procedure and security checking consume more CPU cycles. In contrast, the filter update latency of Swift is basically insusceptible to changes in concurrent connections and background traffic: although all Swift curves in Figure 6 fluctuate slightly, the thin curves overlap with the thick curves to a great extent. This is because Swift filter updates are incremental and adding filter instructions for a new connection takes almost constant time. The large spikes of Swift curves, which occur at the beginning and around the addition of the 120th connection, are attributed to the relatively large overheads caused by pass duplication.
Figures 7 and 8 illustrate the average number of missing packets per data connection by LSF and Swift, respectively. The y-axis scales are again significantly different. The average numbers of missing packets per connection for LSF range from 30 to 160, while those for Swift are only one or two at maximum. Without background traffic, Swift does not miss any packet no matter how many concurrent connections exist. With background traffic, the average levels of the “500 Kpps” curves slightly lift after around 120 concurrent connections, which coincides with the occurrence of the second group of large spikes in Figure 6. The lift of fluctuation level may be attributed to the added passes and related pass duplication. The addition of more passes extends the filtering path for non-FTP packets and results in more CPU time spent on non-FTP traffic filtering. Even so, Swift only misses one or two packets per connection.
There are two additional issues associated with the LSF curves in Figure 7. First, the ceiling phenomena—both “No bg” and “500 Kpps” curves bounded by 160—are caused by the rate-limiting of the FTP servers. As illustrated by Figure 9, in the initial period of a data connection, the servers first transmit about 160 packets in tens of milliseconds and then stay idle for the next several hundred milliseconds (not all shown) to limit downloading rate. Such bounding behavior occurs for a wide range of rate-limit settings (e.g., from 100 KBps to 2 MBps). Since an LSF filter update latency is always shorter than the duration of the idle phase, the number of missing packets in each update is bounded. Second, the round-trip time (RTT) of the FTP trace is small, varying from tens of microseconds to hundreds of microseconds, as the trace is collected in a LAN environment. A larger RTT would cause fewer packets to be transmitted during the time window of a filter update, thus reducing the impact of filter updates on packet missing. Compared to LSF, Swift is almost insensitive to the variation of RTT, and hence can support applications that require high-fidelity data capture in diverse network environments.
We use six sets of filters with increasing complexity, as shown in Table 5, for static filtering performance evaluation. The instruction numbers of these filters in LSF and Swift are also listed for comparison. The Opt-C filter programs show performance gains that could potentially be achieved by improving LSF and Swift to native code speeds.
Table 5: Static filters in pcap language and their instruction counts in LSF and Swift
Filter Description LSF Inst.# Swift Inst.# 1 “” (Accept all packets) 1 0 2 “ip” 3 1 3 “ip src net 192.168.2.0/24 and dst net 10.0.0.0/8” 10 2 4 “ip src or dst net 192.168.2.0/24” 10 2 5 “ip and tcp port (ssh or http or imap or smtp or pop3 or ftp)” 23 2 6 “ip and (not tcp port (80 or 25 or 143) and not ip host ( ... ))”
(The ellipsis mark stands for 38 IP addresses ORed together.)95 10
The trace for static filtering is captured at the gateway of our campus network. It contains over 14 million packets (75 bytes snap length) and its size is around 1.1GB. We play back the trace file at 250 Kpps rate using tcpreplay. Assuming an average of 500 bytes per packet, the playback rate represents a fully utilized 1Gbps link bandwidth. We record the average time spent in accepting and rejecting packets separately, and select the larger value of the two as the filter performance data. We choose the larger value, instead of the smaller one or the average, because the worse case runtime is much less affected by network traffic conditions, such as traffic speed and composition.
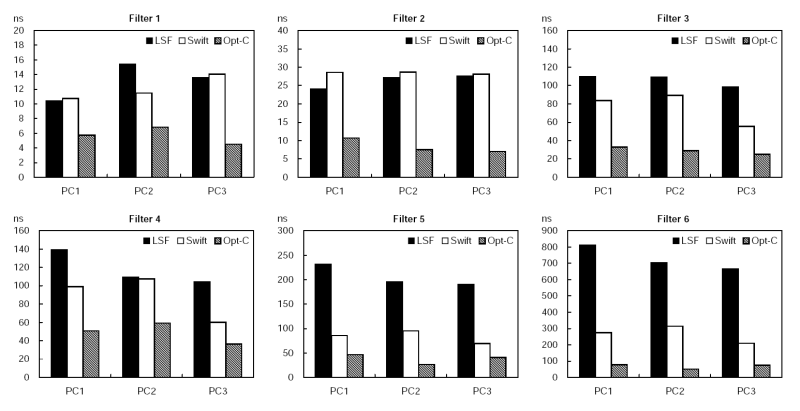
Figure 10 illustrates the per-packet processing time of LSF, Swift, and Opt-C on all machines for each filter. In addition, Table 6 details the breakdown of the per-packet processing time for both LSF and Swift on PC3. The “Exec.” column shows the average execution time per instruction and the average number of instructions executed per packet, in the format of (time/instruction)×(instruction count). The “Aux.” column shows the auxiliary processing time spent on filter engine setup and shutdown operations, such as call/ret instructions and local stack maintenance.
Table 6: Processing time breakdown for LSF and Swift
Filter LSF Swift Exec. Aux. Exec. Aux. 1 5.2ns × 1.0 13.8ns (N/A) × 0 23.1ns 2 10.3ns × 3.0 14.1ns 14.5ns × 1.0 22.1ns 3 9.4ns × 9.0 12.9ns 13.8ns × 2.0 20.9ns 4 8.4ns × 6.0 12.5ns 13.7ns × 2.0 21.2ns 5 10.3ns × 19.8 14.8ns 25.4ns × 1.9 21.3ns 6 8.0ns × 78.6 13.4ns 29.5ns × 7.4 21.5ns
Filters 1 and 2 are the simplest criteria designed to show the minimum overhead induced by the filtering engine. The corresponding results in Figure 10 demonstrate that Swift and LSF have approximately the same processing speed with these two simple filters. Both Swift and LSF run slower than Opt-C. Table 6 further sheds some light on the performances of both LSF and Swift filter engines. For filter 1, the LSF filter program only consists of a simple “ret” instruction, and thus the 5.2 nanoseconds per-instruction execution time is mainly determined by LSF’s interpretation overhead. In contrast, the Swift filter engine is designed to accept all packets by default. Therefore, the Swift filter program does not contain any code, and its processing time is spent entirely on the filter engine setup and shutdown. By adding a “nop” instruction for Swift to execute before accepting a packet, we estimate Swift’s interpretation overhead to be about 8.2 nanoseconds. For filter 2, although the per-instruction execution time of LSF is 29% shorter than that of Swift, its overall execution time is longer than that of Swift. This is because the instruction count ratio between LSF and Swift is three to one.
Filters 3 and 4 are light load criteria designed to demonstrate filtering engine performance on basic packet classification. The corresponding results in Figure 10 indicate that Swift has a moderate performance advantage over LSF on all machines. For filter 3, compared to Opt-C, LSF takes a factor of 2.32 to 2.92 more time to process a packet, with an average slowdown of 2.67 times; Swift takes a factor of 1.22 to 2.07 more time to process a packet, with an average slowdown of 1.61 times. The average speedup of Swift over LSF is 1.43. For filter 4, compared to Opt-C, LSF takes a factor of 0.84 to 1.87 more time to process a packet, with an average slowdown of 1.48 times; Swift takes a factor of 0.65 to 0.95 more time to process a packet, with an average slowdown of 0.80 times. The average speedup of Swift over LSF is 1.39. Similar to the cases of filters 1 and 2, Table 6 shows that for filters 3 and 4, the per-instruction execution time of Swift is about 50% longer than that of LSF, but the much larger instruction count makes LSF slower than Swift in packet processing.
Filter 5 is a moderate load criterion designed to test the filtering engine’s capability of handling highly specific operation. The corresponding results in Figure 10 show that Swift outperforms LSF by a significant amount on all machines. Compared to Opt-C, LSF takes a factor of 3.68 to 6.38 more time to process a packet, with an average slowdown of 4.68 times; Swift takes a factor of 0.70 to 2.60 more time to process a packet, with an average slowdown of 1.39 times. The average speedup of Swift over LSF is 2.50. The significant speedup of Swift is due to its architectural advantages and specifically SIMD instructions. The ability to pack many operands (12 for TCP/DUP ports) in one instruction and batch the execution of comparison operations within a single filter engine “cycle” enables many-fold reduction at the cost of instruction interpretation, and improves the performance of Swift close to that of Opt-C. As shown in Table 6, compared to previous filters, LSF maintains its per-instruction execution time, but executes much more instructions. By contrast, Swift maintains its instruction count, and packs more operations in each instruction.
Filter 6 is a heavy load, “real life” criterion obtained from the campus network administrator. This filter is used by an application to detect suspicious IRC traffic. The filter is sufficiently complex for Swift to utilize the optimizations discussed earlier, namely SIMD instructions and hierarchical execution optimization. The corresponding results in Figure 10 show even higher performance increase of Swift against LSF. Compared to Opt-C, LSF takes a factor of 7.83 to 12.94 more time to process a packet, with an average slowdown of 10.09 times; Swift takes a factor of 1.79 to 5.21 more time to process a packet, with an average slowdown of 3.18 times. The average speedup of Swift over LSF is 2.79. According to Table 6, even though the per-instruction execution time of LSF is less than one third of Swift, the instruction count ratio between LSF and Swift is ten to one.
For all these filters, the auxiliary processing time for both LSF and Swift is fairly steady, as shown in Table 6. Although the auxiliary cost of Swift is about 8 to 9 nanoseconds more than that of LSF, the extra cost is insignificant as the filter becomes more complex and requires more time to execute.
We further measure the average execution time of Swift filter 5 with no SIMD extension (“Less-optimized”) and with neither SIMD extension nor hierarchical execution (“Unoptimized”) to provide more insights into the effect of Swift optimizations on performance improvement. The corresponding results are listed in Table 7. The removal of SIMD instructions exerts a great impact on the performance of the Swift filter, resulting in a slowdown of 156%. The comparatively small increase of execution time after the removal of hierarchical execution indicates that the hierarchical execution has a minor effect on the performance of the Swift filter. For Swift filter 6, due to filter program organization, we remove hierarchical execution optimization for the "Less-optimized" experiment, and remove both hierarchical execution and SIMD extension for the "Unoptimized" experiment. Again, the impact of SIMD extension is far greater than that of hierarchical execution on the average execution time.
Overall, we find that (1) the SIMD extension plays a very important role in speeding up Swift filter execution, and (2) the hierarchical execution also helps the speedup but its effect is much smaller than that of SIMD extension, especially with a large instruction count. Without the SIMD extension and hierarchical execution, Swift can only perform comparably to optimized LSF for static filter tasks. These results are consistent with our observation from Figure 10 and Table 6: the speedup of Swift is mainly attributed to its use of much fewer instructions than LSF.
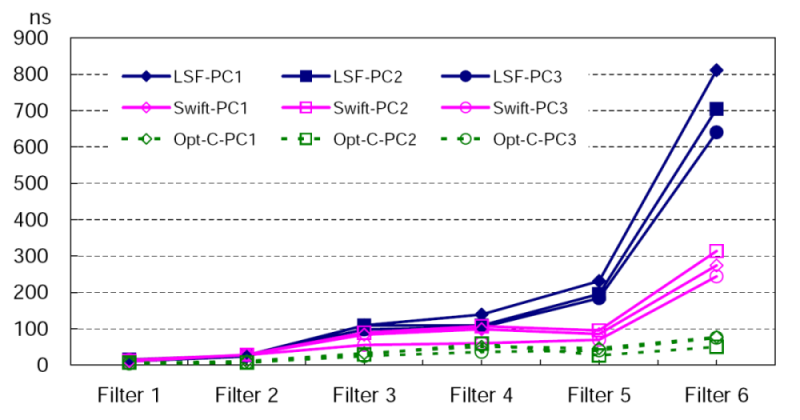
Figure 11 presents a comprehensive picture of filter execution time for LSF, Swift, and Opt-C filters among all machines categorized by six filtering criteria. It provides a good overview of the static filtering performance for cross comparison. When the filtering criteria are simple, LSF, Swift and Opt-C have nearly indistinguishable performance. As the criteria become more complex, the differences of filter execution time among the three filtering engines grow. Although both Swift and LSF run slower than Opt-C, the filter execution time of Swift grows at a much slower rate than that of LSF, and thus Swift achieves much closer performance to Opt-C than LSF.
This paper presents the design and implementation of the Swift packet filter. Swift provides an elegant, fast, and efficient packet filtering technique to handle the challenge of high speed network monitoring with dynamic filter updates. The key features of Swift lie in its low filter update latency and high execution efficiency. Swift attains these performance advantages by embracing several major design innovations: (1) a specialized CISC instruction set increases filter execution efficiency and eliminates filter re-compilation, resulting in significantly reduced filter update latency; (2) a simple computational model removes the necessity of security checking and improves filter update latency; and (3) SIMD extensions further boost filter execution efficiency.
Our extensive experiments have validated Swift’s efficacy and demonstrated the superiority of Swift against the de facto packet filter, BPF. For dynamic filtering tasks, the filter update latency of Swift is three orders of magnitude lower than that of BPF, and on each filter update, the number of packets missed by Swift is about two orders of magnitude less than that by BPF. For static filtering tasks, Swift runs as fast as BPF on simple filtering criteria, but is up to three times as fast as BPF on complex filtering criteria. Swift also performs much closer to optimized C filters than BPF.
There are many avenues we would like to further experiment and exploit in Swift. For instance, we will explore the multi-thread expansion of Swift, and develop a hardware optimized filter engine. We will make use of the extra registers supplied in the x86_64 processors for further performance improvement. Moreover, we envision that x86 high performance multimedia instructions (such as MMX and SSE) can also be used to accelerate the packet processing.
We are very grateful to our shepherd Eddie Kohler and the anonymous reviewers for their insightful and detailed comments, which have greatly improved the quality of the paper. This work was partially supported by NSF grants CNS-0627339 and CNS-0627340.
The source code of Swift is available at https://www.cs.wm.edu/~hnw/swift/.
This document was translated from LATEX by HEVEA.