2nd USENIX Windows NT Symposium
[Technical Program]
| Pp. 57–66 of the Proceedings |  |
A Thread Performance Comparison:
Windows NT and Solaris on A Symmetric Multiprocessor
Abstract
Manufacturers now have the capability to build high performance multiprocessor
machines with common PC components. This has created a new market
of low cost multiprocessor machines. However, these machines are
handicapped unless they have an operating system that can take advantage
of their underlying architectures. Presented is a comparison of two
such operating systems, Windows NT and Solaris. By focusing on their
implementation of threads, we show each system's ability to exploit multiprocessors.
We report our results and interpretations of several experiments that were
used to compare the performance of each system. What emerges is a
discussion on the performance impact of each implementation and its significance
on various types of applications.
1. Introduction
A few years ago, high performance multiprocessor machines had a price tag
of $100,000 and up, see [16]. The multiprocessor
market consisted of proprietary architectures that demanded a higher cost
due to the scale of economics. Intel has helped to change that by
bringing high performance computing to the mainstream with its Pentium
Pro (PPro) processor. The PPro is a high performance processor with
built in support for multiprocessing, see [4].
This coupled with the low cost of components has enabled computer manufacturers
to build high performance multiprocessor machines at a relatively low cost.
Today a four processor machine costs under $12,000.
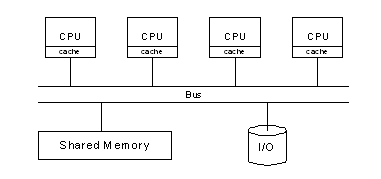 Figure 1: A basic symmetric multiprocessor
architecture.
Figure 1: A basic symmetric multiprocessor
architecture.
1.1 Symmetric Multiprocessing
Symmetric multiprocessing (SMP) is the primary parallel architecture
employed in these low cost machines. An SMP architecture is a tightly
coupled multiprocessor system, where processors share a single copy of
the operating system (OS) and resources that often include a common bus,
memory and an I/O system, see Figure 1. However,
the machine is handicapped unless it has an OS that is able to take advantage
of its multiprocessors. In the past, the manufacturer of a multiprocessor
machine would be responsible for the design and implementation of the machine's
OS. It was often the case, the machines could only operate under
the OS provided by the manufacturer. The machines described here
are built from common PC components and have open architectures.
This facilitates an environment where any software developer can design
and implement an OS for these machines. Two mainstream examples of
such operating systems are Sun's Solaris and Microsoft's Windows NT.
They exploit the power of multiprocessors by incorporating multitasking
and multithreading architectures. Their implementations are
nevertheless very different.
1.2 Objects Of Execution
Classic operating systems, such as UNIX, define a process as an
object of execution that consists of an address space, program counter,
stack, data, files, and other system resources. Processes are individually
dispatched and scheduled to execute on a processor by the operating system
kernel, the essential part of the operating system responsible for
managing hardware and basic services. In the classic case, a multitasking
operating system divides the available CPU time among the processes of
the system. While executing, a process has only one unit of control.
Thus, the process can only perform one task at a time.
In order to exploit concurrency and parallelism, operating systems like
NT and Solaris further develop the notion of a process. These operating
systems break the classical process into smaller sub-objects. These
sub-objects are the basic entity to which the OS allocates processor time.
Here we will refer them as kernel-level objects of execution. Current
operating systems allow processes to contain one or more of these sub-objects.
Each sub-object has its own context yet it shares the same address
space and resources, such as open files, timers and signals, with other
sub-objects of the same process. The design lets the sub-objects
function independently while keeping cohesion among the sub-objects of
the same process. This creates the following benefits.
Since each sub-object has its own context each can be separately dispatched
and scheduled by the operating system kernel to execute on a processor.
Therefore, a process in one of these operating systems can have one or
more units of control. This enables a process with multiple sub-objects
to overlap processing. For example, one sub-object could continue
execution while another is blocked by an I/O request or synchronization
lock. This will improve throughput. Furthermore with a multiprocessor
machine, a process can have sub-objects execute concurrently on different
processors. Thus, a computation can be made parallel to achieve speed-up
over its serial counterpart. Another benefit of the design arises
from sharing the same address space. This allows sub-objects of the
same process to easily communicate by using shared global variables.
However, the sharing of data requires synchronization to prevent simultaneous
access. This is usually accomplished by using one of the synchronization
variables provided by the OS, such as a mutex. For general background
information on synchronization variables see [14],
for information on Solaris's synchronization variables see [1,
5, 12, 13],
and [7, 10, 15]
for Windows NT's synchronization variables.
2. Solaris's and Windows NT's Design
Windows NT and Solaris further develop the basic design by subdividing
the kernel-level objects of execution into smaller user-level objects of
execution. These user-level objects are unknown to the operating
system kernel and thus are not executable on their own. They are
usually scheduled by the application programmer or a system library to
execute in the context of a kernel-level object of execution.
Windows NT and Solaris kernel-level objects of execution are similar
in several ways. Both operating systems use a priority-based, time-sliced,
preemptive multitasking algorithm to schedule their kernel-level objects.
Each kernel-level object may be either interleaved on a single processor
or execute in parallel on multiprocessors. However, the two operating
systems differ on whether user-level or kernel-level objects should be
used for parallel and concurrent programming. The differences have
implications on the overall systems' performances, as we will see in later
sections.
2.1 NT's Threads and Fibers
A thread is Windows NT's smallest kernel-level object of execution.
Processes in NT can consist of one or more threads. When a process
is created, one thread is generated along with it, called the primary
thread. This object is then scheduled on a system wide basis
by the kernel to execute on a processor. After the primary thread
has started, it can create other threads that share its address space and
system resources but have independent contexts, which include execution
stacks and thread specific data. A thread can execute any part of
a process' code, including a part currently being executed by another thread.
It is through threads, provided in the Win32 application programmer interface
(API), that Windows NT allows programmers to exploit the benefits of concurrency
and parallelism.
A fiber is NT's smallest user-level object of execution.
It executes in the context of a thread and is unknown to the operating
system kernel. A thread can consist of one or more fibers as determined
by the application programmer. Some literature [1,11]
assume that there is a one-to-one mapping of user-level objects to kernel-level
objects, this is inaccurate. Windows NT does provide the means for
many-to-many scheduling. However, NT's design is poorly documented
and the application programmer is responsible for the control of fibers
such as allocating memory, scheduling them on threads and preemption.
This is different from Solaris's implementation, as we shall see in the
next section. See [7, 10]
for more details on fibers. An illustrative example of NT's design
is shown in Figure 2.
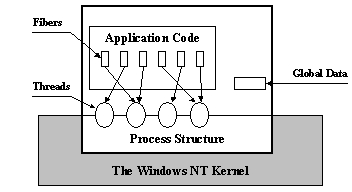 Figure 2: The relationships of a process
and its threads and fibers in Windows NT.
Figure 2: The relationships of a process
and its threads and fibers in Windows NT.
2.2 Solaris's LWPs and Threads
A light weight process (LWP) is Solaris's smallest kernel-level
object of execution. A Solaris process consists of one or more light
weight processes. Like NT's thread, each LWP shares its address space
and system resources with LWPs of the same process and has its own context.
However, unlike NT, Solaris allows programmers to exploit parallelism through
a user-level object that is built on light weight processes. In Solaris,
a thread is the smallest user-level object of execution. Like
Windows NT's fiber, they are not executable alone. A Solaris thread
must execute in the context of a light weight process. Unlike NT's
fibers, which are controlled by the application programmer, Solaris's threads
are implemented and controlled by a system library. The library controls
the mapping and scheduling of threads onto LWPs automatically. One
or more threads can be mapped to a light weight process. The mapping
is determined by the library or the application programmer. Since
the threads execute in the context of a light weight process, the operating
system kernel is unaware of their existence. The kernel is only aware
of the LWPs that threads execute on. An illustrative example of this
design is shown in Figure 3.
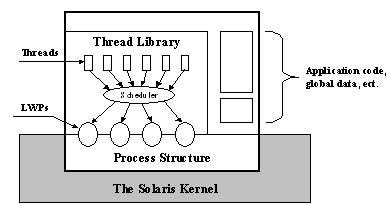
Figure 3: The relationships of a process and its
LWPs and threads in Solaris.
Solaris's thread library defines two types of threads according to scheduling.
A bound thread is one that permanently executes in the context of
a light weight process in which no other threads can execute. Consequently,
the bound thread is scheduled by the operating system kernel on a system
wide basis. This is comparable to an NT thread.
An unbound thread is one that can execute in the context of any
LWP of the same process. Solaris uses the thread library for the
scheduling of these unbound threads. The library works by creating
a pool of light weight processes for any requesting process. The
initial size of the pool is one. The size can be automatically adjusted
by the library or can be defined by the application programmer through
a programmatic interface. It is the library's task to increase or
decrease the pool size to meet the requirements of an application.
Consequently, the pool size determines the concurrency level (CL) of the
process. The threads of a process are scheduled on a LWP in the pool,
by using a priority based, first-in first-out (FIFO) algorithm. The
priority is the primary algorithm and FIFO is the secondary algorithm (within
the same priority). In addition, a thread with a lower priority may
be preempted from a LWP by higher priority thread or by a library call.
Here we will only consider threads of the same priority without preemption.
Thus, the scheduling algorithm is solely FIFO. In this case, once
a thread is executing it will execute to completion on a light weight process
unless it is blocked or preempted by the user. If blocked, the library
will remove the blocked thread from the LWP and schedule the next thread
from the queue on that LWP. The new thread will execute on the LWP
until it has completed or been blocked. The scheme will then continue
in the same manner. For more information on Solaris's design and
implementation, see [1, 5, 12,
13].
3. Experiments
Seven experiments were conducted to determine if differences in the implementation,
design and scheduling of threads would produce significant differences
in performance. None of the experiments used NT's Fibers since they
require complete user management and any comparison using them would be
subject to our own scheduling algorithms. Furthermore, we wanted
to test each system's chosen thread API. Thus we chose to compare
the performance of NT's threads to three variations of Solaris's threads
(bound, unbound, and restricted concurrency). Although it may seem
unfair to compare NT's kernel implementation to Solaris's user implementation,
it is fair because Solaris's implementation is not purely user based.
Embedded in its design are kernel objects, LWPs. Therefore, like
the NT case, the OS kernel is involved in scheduling. Furthermore,
the comparison is between each operating system's chosen thread model and
thus we are comparing models that each system has specifically documented
for multithreading. The models do have fundamental differences, yet
they still warrant a comparison to determine how each could effect different
aspects of performance. The conducted experiments tried to achieve
this by measuring the performance of each system under different conditions.
In some cases, the experiments tried to simulate the conditions of real
applications such the ones found in client/server computing and parallel
processing. The seven experiments were:
1. Measure the maximum number of kernel threads that could
be created by each system (Section 3.2).
2. Measure the execution time of thread creation (Section
3.2).
3. Measure the speed of thread creation on a heavily loaded system
(Section 3.2).
4. Determine how each operating system's thread implementation would
perform on processes with CPU intensive threads that did not require any
synchronization (Section 3.3).
5. Determine how each operating system's thread implementation would
perform on processes with CPU intensive threads that required extensive
synchronization (Section 3.4).
6. Determine the performance of each operating system's implementation
on parallel searches implemented with threads (Section
3.5).
7. Determine the performance of each operating system's implementation
on processes with threads that had bursty processor requirements (Section
3.6).
To restrict the concurrency of Solaris's threads in the experiments, unbound
threads were created and their concurrency was set to the number of processors,
noted by (CL = 4) in the tables. In theory, this created a LWP for
each processor and imposed on the thread library to schedule the unbound
threads on the LWPs. To use Solaris unbound threads, threads were
created without setting the concurrency level. Thus, only one LWP
was made available to the thread library, and the test program could not
exploit the multiprocessors. However, the thread library is documented
[11, 12, 13]
as having the capability to increase or decrease the pool of LWPs automatically.
Therefore, any processes using unbound threads, including processes that
contain with restricted concurrency, indirectly test the thread library's
management of the LWP pool.
Our reported benchmarks are in seconds for an average of 10 trials.
In most cases, the standard deviations ( )
for trails were less than 0.15 seconds. We only report ,
when a trial's
>= 0.2 seconds. )
for trails were less than 0.15 seconds. We only report ,
when a trial's
>= 0.2 seconds.
3.1 Parameters
We acknowledge the arguments on the stability of benchmarks presented in
[2]. Thus, we take every precaution to create
a uniform environment. For all experiments, the default priority
was used for each system's kernel-level objects of execution. Experiments
were performed on the same hardware, a four PPro SMP machine with 512 megabytes
of RAM and a four-gigabyte fast and wide SCSI hard drive. At any
one time, the machine solely operated under Solaris version 2.6 or Windows
NT Server version 4.0. This was implement by a dual boot to facilitate
easy switching between the OSs. Each operating system used its native
file system. There were no other users on the machine during experiments.
The "same compiler", GNU gcc version 2.8.1, was used to compile the test
programs for both operating systems. Originally, this was done to
reduce any variances in execution time that could be attributed to different
compilers. However, later we compiled the test programs with each
system's native compiler (Visual C++ 5.0 and SUN C Compiler 4.2) and found
no significant differences in performance. In order to maintain a
standard format, we chose to only report the results from the gcc compilations.
Note, all test programs were compiled with the options: -O3 -mpentiumpro
-march=pentiumpro. These options generate the highest level of
performance optimizations for a Pentium Pro.
3.2 Thread Creation
The first experiment measured the maximum number of kernel-level objects
of execution each operating system could create, since neither system clearly
documents the limit. The experiment was performed by repeatedly creating
threads (bound in the Solaris case) that suspended after creation.
At some given point, the tested operating system would fail trying to create
a thread because it had exhausted resources or had reached the preset limit.
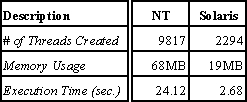
Table 1: Comparison of the maximum number
of threads allowable.
Table 1 shows the test program executing on Solaris
failed after 2294 requests to create bound threads. At the time of
termination, the process had only used 19 megabytes of memory. The
Windows NT test program created 9817 threads before failing. At that
time, it had used approximately 68 megabytes of memory. In addition,
the table shows the amount of time required to create the threads.
The second experiment, shown in Table 2, measured
the speed of thread creation on both systems. The table shows Solaris
bound threads and NT threads had similar performances. The similar
performance can be attributed to the fact that each OS required system
calls for thread creation. In the case of Solaris, this was done
indirectly through the thread library. The library was required to
make a system call to create an LWP for each bound thread. In addition
as expected, Solaris's unbound thread creation outperformed NT's.
In this case, Solaris's thread creation required a simple library call,
while NT's required a system call. It is also worth noting that the
Solaris restricted concurrency case (CL=4) was only marginally slower than
the Solaris unbound case. This was because only four LWPs were needed.
Thus, only four system calls were required to create the threads.
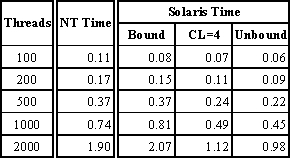 Table 2: Comparison of thread creation speed.
Table 2: Comparison of thread creation speed.
The third experiment also involved the creation of threads. The
experiment measured the speed of thread creation while other threads were
executing CPU intensive tasks. The tasks included several integer
operations such as addition, subtraction, and multiplication. This
imposed on each OS to create threads on a heavily loaded system.
The number of threads created was varied. Table
3 shows how long it took to create a collection of threads in each
system.
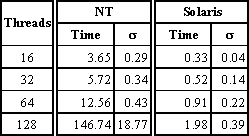 Table 3: Comparison of the performance of processes
that create CPU intensive threads.
Table 3: Comparison of the performance of processes
that create CPU intensive threads.
The experiment showed that the Solaris version of the test program
created threads much faster than the NT version. This can be attributed
to each systems multitasking scheduling algorithm. Although, the
algorithms are similar in design, priority differences exist. Solaris's
algorithm was fair with respect to newly created LWPs, while NT scheduling
algorithm gave priority to currently executing threads. Thus in the
case of NT, requests for thread creation took longer because of the heavily
loaded system. We found this to be characteristic of NT's scheduling
algorithm. In various cases, executing several CPU-bound threads
severely reduced the responsiveness of the system. Microsoft documents
this behavior in [7]. Also, in both the Solaris
and the NT cases, as the number of threads increased, the thread creation
time became less predictable. This was especially true in the NT
case, = 18.77
seconds when 128 threads were used.
3.3 No Synchronization
The fourth experiment determined how each operating system's thread implementation
would perform on processes that created CPU intensive threads (with identical
workloads) that did not require any synchronization. The experiment
was performed by executing a process that created threads, where each thread
had a task to perform that required a processor for approximately 10 consecutive
seconds. A thread would perform its task and then terminate.
After all the threads terminated, the creating process would terminate.
Table 4 shows how long it took processes to complete
in each system.
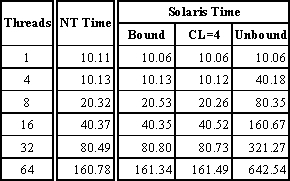 Table 4: Comparison of the performance of processes
with CPU intensive threads that do not require synchronization.
Table 4: Comparison of the performance of processes
with CPU intensive threads that do not require synchronization.
The experiment showed few differences in performance between NT threads
and Solaris bound threads. This suggests that Solaris bound threads
are similar to NT threads while performing CPU intensive tasks that did
not require synchronization. However, it is worth noting that as
the number of CPU intensive threads increased, Windows NT's performance
was slightly better.
In Solaris's unbounded and CL=4 cases, the thread library did not increase
nor decrease the size of the LWP pool. Therefore, only one LWP was
used by the library for the unbounded case. Consequently, the unbound
threads took approximately 10N time, where N was the number of threads
used. (Recall each thread performed a 10 second task.) The
performance was also reflective of the FIFO algorithm used by library.
Another point worth noting is that in Solaris CL=4 case, the performance
was equivalent to that of the bound threads, which were optimal.
Thus, additional LWPs did not increase the performance. This leads
to two observations. First, in the case of equal workloads with no
synchronization, peek performance is reached when the amount of LWPs is
equal to the number of processors. Second, the time it takes Solaris's
thread library to schedule threads on LWP is not a factor in performance.
3.4 Extensive Synchronization
The fifth experiment determined how each operating system's thread implementation
would perform on processes that use threads (with identical workloads),
which require extensive synchronization. The test program was a slightly
altered version of an example from [1] called "array.c".
The test program created a variable number of threads that modified a shared
data structure for 10000 iterations. Mutual exclusion was required
each time a thread needed to modify the shared data. In the general
case, this can be implemented with a mutual exclusion object, like a mutex.
Both operating systems offer local and global mutual exclusion objects
. Windows NT provides two mutual exclusion objects, a mutex, which
is global, and a critical section, which is local. Solaris only provides
a mutex. However, an argument can be passed to its initialization
function, to specify its scope. We thus chose to compare each system's
local and global mutual exclusion objects. Tables
5 and 6 shows the execution times for processes
to complete in each system.
The results show NT out performs Solaris when using local synchronization
objects, while Solaris out performs NT when using global synchronization
objects. In addition, the experiment showed large differences in
the performance of NT's mutex in comparison to its critical section, and
few differences in performance of Solaris local mutex in comparison to
its global mutex. The poor performance of NT's mutex was directly
attributed to its implementation. NT's mutex is a kernel object that
has many security attributes that are used to secure its global status.
NT's critical section is a simple user object that only calls the kernel
when there is contention and a thread must either wait or awaken.
Thus, its stronger performance was due to the elimination of the overhead
associated with the global mutex.
The Solaris case CL = 4 outperformed both bound and unbound Solaris
cases. This was due to a reduction in contention for a mutex.
This reduction was caused by the LWP pool size. Since the pool size
was four, only four threads could execute concurrently. Consequently,
only four threads could contend for the same mutex. This reduced
the time threads spent blocked, waiting for a mutex. Furthermore,
when a thread was blocked, the thread library scheduled another thread
on the LWP of the blocked thread. This increased the throughput of
the process.
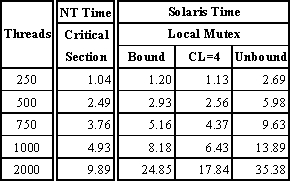 Table 5: Comparison of the performance of processes
with threads that required extensive synchronization using local/intra-process
syncronization objects.
Table 5: Comparison of the performance of processes
with threads that required extensive synchronization using local/intra-process
syncronization objects.
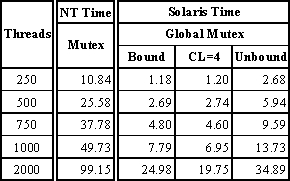 Table 6: Comparison of the performance of processes
with threads that require extensive synchronization using global/inter-process
synchronization objects.
Table 6: Comparison of the performance of processes
with threads that require extensive synchronization using global/inter-process
synchronization objects.
The results show NT out performs Solaris when using local synchronization
objects, while Solaris out performs NT when using global synchronization
objects. In addition, the experiment showed large differences in
the performance of NT's mutex in comparison to its critical section, and
few differences in performance of Solaris local mutex in comparison to
its global mutex. The poor performance of NT's mutex was directly
attributed to its implementation. NT's mutex is a kernel object that
has many security attributes that are used to secure its global status.
NT's critical section is a simple user object that only calls the kernel
when there is contention and a thread must either wait or awaken.
Thus, its stronger performance was due to the elimination of the overhead
associated with the global mutex.
The Solaris case CL = 4 outperformed both bound and unbound Solaris
cases. This was due to a reduction in contention for a mutex.
This reduction was caused by the LWP pool size. Since the pool size
was four, only four threads could execute concurrently. Consequently,
only four threads could contend for the same mutex. This reduced
the time threads spent blocked, waiting for a mutex. Furthermore,
when a thread was blocked, the thread library scheduled another thread
on the LWP of the blocked thread. This increased the throughput of
the process.
3.5 Parallel Search
The fifth experiment tried to determine how each operating system's thread
implementation would perform on the execution of a parallel search implemented
with threads that required limited synchronization. Here we explored
the classic symmetric traveling salesman problem (TSP). The problem
is defined as follows:
Given a set of n nodes and distances for each pair of nodes,
find a roundtrip of minimal total length visiting each node exactly once.
The distance from node i to node j is the same as from node j to node i.
The problem was modeled with threads to perform a parallel depth-first
branch and bound search. For background information on parallel searches,
see [6]. The threads were implemented in a work
pile paradigm, see Chapter 16 in [5]. The work
pile contained equally sized partially expanded branches of the search
tree. The threads obtained partially expanded branches from the work
pile and fully expanded them in search of a solution. The initial
bound of the problem was obtained by a greedy heuristic, see [8].
For testing purposes, the heuristic always returned the optimal solution.
Therefore, it was the task of the threads to verify the optimality of the
heuristic. Synchronization was required for accessing the work pile
and for solution updates. Yet, recall the previous experiment showed
that NT's mutex performed poorly when extensive synchronization was required.
This leads one to believe that a critical section should be used for NT.
However, after thorough testing, it was found that, synchronization occurred
infrequently enough that it could be implemented by using mutexes without
any loss in performance as compared to a critical section. We still
chose to report our results using a critical section for NT. In the
case of Solaris, a mutex with local scope was used. The data, gr17.tsp
with n = 17, were obtained from the TSPLIB at Rice University [17].
Table 7 shows how long it took to verify optimality
using processes in each system.
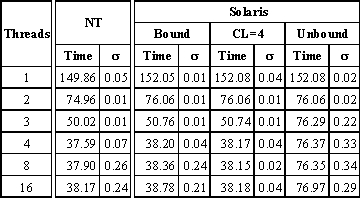 Table 7: Comparison of the performance of the
TSP using threads to perform a parallel depth-first branch and bound search
(Data: gr17.tsp, n = 17).
Table 7: Comparison of the performance of the
TSP using threads to perform a parallel depth-first branch and bound search
(Data: gr17.tsp, n = 17).
The NT version of the TSP slightly outperformed the Solaris version.
Both systems were able to achieve an almost linear speed up (3.9+).
The Solaris benchmarks again showed that when the LWP pool size was four
the performance was equivalent to using four bound threads. Another
observation was that when using two or more of Solaris's unbound threads
the performance was equal to using two of Solaris's bound threads.
This would suggest that the thread library used two LWPs although two LWPs
were not requested. This is the only experiment where Solaris's thread
library changed the size of the LWP pool.
3.6 Threads With CPU Bursts
The last experiment determined how each operating system's thread implementation
would perform on processes that had many threads with CPU bursts.
This is analogous to applications that involve any type of input and output
(I/O), e.g., networking or client/server applications, such as back end
processing on a SQL server. The experiment was performed by executing
a process that created many threads. Each thread would repeatedly
be idle for one second and then require the CPU for a variable number of
seconds. Three burst lengths were explored, one less than the idle
time (0.5 sec.), one equal to the idle time (1.0 sec.) and one greater
than the idle time (4 sec.). The amount of required CPU time causes
the threads to act as if they are I/O-bound, equally-bound, or CPU- bound,
respectively. Tables 8 – 10
show how long it took to complete the processes in each system.
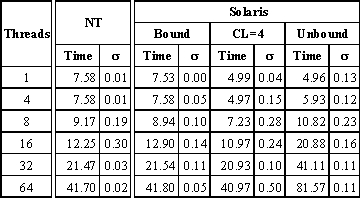 Table 8: Comparison of the performance of processes
with threads that require the CPU for intervals that are less than their
idle time (I/O-Bound).
Table 8: Comparison of the performance of processes
with threads that require the CPU for intervals that are less than their
idle time (I/O-Bound).
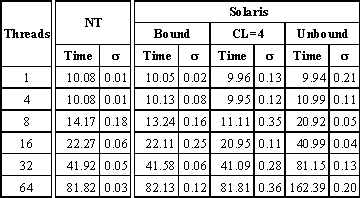 Table 9: Comparison of the performance of processes
with threads that require the CPU for intervals that are equal to their
idle time (Equally-Bound).
Table 9: Comparison of the performance of processes
with threads that require the CPU for intervals that are equal to their
idle time (Equally-Bound).
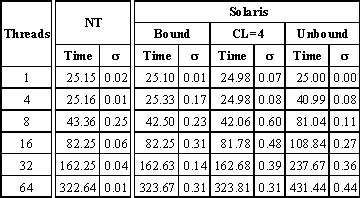 Table 10: Comparison of the performance of processes
with threads that require the CPU for intervals that are greater than their
idle time (CPU-Bound).
Table 10: Comparison of the performance of processes
with threads that require the CPU for intervals that are greater than their
idle time (CPU-Bound).
The experiments showed a few differences in the performance between
Solaris's bound threads, Solaris's threads with restricted concurrency
and NT's threads. A noticeable difference in performance occurred
in the first two cases, shown in Tables 8 and 9,
where the threads required the CPU for intervals that were less than or
equal to their idle time. In these cases, the Solaris version using
restricted concurrency showed a slightly better performance in comparison
to NT's threads or Solaris bound and unbound threads. This can be
directly attributed to Solaris's two-tier system. In this case, it
was shown that optimal performance could be achieved by setting the concurrency
level to the number of CPUs and creating as many unbound threads as needed.
This logically creates one LWP for each CPU. Recall the operating
system is only aware of the LWPs. This coupled with the FIFO scheduling
of Solaris's thread library keeps its bookkeeping to a minimal while maximizing
the concurrency.
There were also notable differences in performance in the last case,
Table 10, where the CPU intervals were greater
than the idle time, CPU-bound. The results of Solaris's bound threads
and NT's threads were similar to the fourth experiment, Section
3.3, Table 4. NT's threads out performed
Solaris's bound threads as the number of threads increased.
4. Conclusions
Both Windows NT and Solaris were able to utilize multiprocessors.
Their performance scaled well with the number of CPUs. However, there
is a lack of documentation pertaining to the performance issues of each
system. Microsoft and Sun have taken steps in the right direction
with the availability of documentation at their respective web sites [7]
and [18]. However, little is written on the performance
impact of each design. Yet, we found that each implementation can
have significant performance implications on various types of applications.
The experiments showed that Windows NT's thread implementation excelled
at CPU intensive tasks that had limited synchronization or only intra-process
synchronization. Therefore, NT's threads can be greatly exploited
on applications such as parallel computations or parallel searches.
The experiments also showed that NT's mutex performed poorly compared to
Solaris's mutex, when extensive synchronization was required. However,
NT's critical section provided significantly better performance than Solaris's
mutex. Therefore, for NT, a critical section should be used to implement
extensive intra-process synchronization. Another NT observation was
that to achieve optimal performance the number of threads used by a process
for the execution of a parallel search or computation should be approximately
equal to the number of CPUs. Although, it was found that the exact
number of threads was dependent on the specific problem, its implementation
and the specific data set being used, also see [6].
It is also worth noting, that both systems grew erratic as the number of
executing CPU intensive threads grew larger than the number of processors.
This was especially true in the NT case. Responsiveness was sluggish
on heavily loaded systems and often required dedicated system usage.
Solaris's thread API proved to be more flexible, at the cost of complexity.
We found that the exploitation of multiprocessors required a thorough understanding
of the underlying OS architecture. However, we also found Solaris's
two-tier design to have a positive performance impact on tasks with bursty
processor requirements. This suggests that Solaris threads are well
suited for applications such back end processing or client/server applications,
where a server can create threads to respond to a client's requests.
In addition, we found the Solaris thread library's automatic LWP pool size
control to be insignificant. We found in most cases, the programmer
can achieve desirable performance with unbound threads and a restricted
concurrency level that is equal to the number of processors.
In conclusion, the advent of relatively inexpensive multiprocessor machines
has placed a critical importance on the design of mainstream operating
systems and their implementations of threads. Threads have become
important and powerful indispensable programming tools. They give
programmers the ability to execute tasks concurrently. When used
properly they can dramatically increase performance, even on a uniprocessor
machine. However, threads are new to mainstream computing and are
at a relatively early stage of development. Thus, arguments exist
on how threads should be implemented. Yet, one should remember that
differences between implementations are simply tradeoffs. Implementers
are constantly trying to balance their implementations by providing facilities
they deem the most important at some acceptable cost.
Note there has been a movement to standardize threads. IEEE has
defined a thread standard POSIX 1003.1c-1995 that is an extension to the
1003.1 Portable Operating System Interface (POSIX). The standard,
called pthreads, is a library-based thread API. It allows
one to develop thread applications cross platform. However, IEEE
does not actually implement the library. It only defines what should
be done, the API. This leaves the actual implementation up to the
operating system developer. Usually the pthreads library is built
on the developer's own thread implementation. It is simply a wrapper
over the developers' own implementation and thus, all features may or may
not exist. In the case where the OS does not have a thread implementation,
the library is solely user based, and thus can not exploit multiprocessors.
5. Acknowledgements
This research is supported in part by ONR grant N00014-96-1-1057.
References
[1] Berg, D.J.; Lewis, B.: Threads Primer:
A Guide to Multithreaded Programming, SunSoft Press, 1996
[2] Collins, R.R.: Benchmarks: Fact,
Fiction, or Fantasy, Dr. Dobb's Journal, March 1998
[3] El-Rewini, H.; Lewis, T.G.: Introduction
to Parallel Computing, Prentice Hall, 1992
[4] Intel: The Pentium Pro Processor
Performance Brief, Available at:
https://www.intel.com/procs/perf/highend/index.htm
[5] Kleiman, S.; Shah, D.; Smaalders,
B.: Programming With Threads, SunSoft Press, 1996
[6] Kumar, V.; Grama, A.; Gupta, A.;
Karypis, G.: Introduction to Parallel Computing: Design and Analysis
of Algorithms, Chapter 8,
Benjamin Cummings, 1994
[7] Microsoft: Microsoft Developer Network,
https://www.microsoft.com/msdn
[8] McAloon, K.; Tretkoff, C.: Optimization
and Computational Logic, Wiley, 1996
[9] Prasad, S.: Weaving a Thread, Byte,
October 1996
[10] Richter, J.: Advanced Windows NT: The
Developer's Guide to the Win32 Application
Programming Interface,
Microsoft Press, 1994
[11] SunSoft: Multithreaded Implementations
and Comparisons, A White Paper, 1996
[12] SunSoft: Multithread Programming Guide,
A User Manual, 1994
[13] SunSoft: Solaris SunOS 5.0 Multithread
Architecture, A White Paper, 1991
[14] Tanenbaum, A.S.: Distributed Operating
Systems, Prentice Hall, 1995
[15] Tomlinson, P.: Understanding NT: Multithreaded
Programming, Windows Developer's Journal, April 1996
[16] Thompson, T.: The World's Fastest Computers,
Byte, January 1996
[17] TSPLIB: https://softlib.rice.edu/softlib/tsplib/
[18] https://www.sun.com/workshop/threads
|
