|
USENIX '04, UseLinux SIG Session Paper
[USENIX '04 Technical Program, SIG Sessions]
Making RCU Safe for Deep Sub-Millisecond Response Realtime Applications
Abstract:
Linux TM
has long been used for soft realtime applications.
More recent work is preparing Linux for more aggressive
realtime use, with scheduling latencies in the small
number of hundreds of microseconds (that is right,
microseconds, not milliseconds).
The current Linux 2.6 RCU implementation both helps
and hurts.
It helps by removing locks, thus reducing latency in
general, but hurts by causing large numbers of RCU
callbacks to be invoked all at once at the end of
the grace period.
This batching of callback invocation improves throughput,
but unacceptably degrades realtime response for
the more discerning realtime applications.
This paper describes modifications to RCU that greatly
reduce its effect on scheduling latency, without
significantly degrading performance for non-realtime
Linux servers.
Although these modifications appear to prevent RCU from
interfering with realtime scheduling, other Linux kernel
components are still problematic.
We are therefore working on tools to help identify the
remaining problematic components and to definitively
determine whether RCU is still an issue.
In any case, to the best of our knowledge, this is the first time
that anything resembling RCU has been modified to accommodate the
needs of realtime applications.
1 Introduction
Tests of realtime response on the Linux 2.6 kernel found unacceptable
scheduling latency, in part due to the batching of callbacks used in
the RCU implementation.
This batching is essential to good performance on non-realtime servers,
since the larger the batch, the more callbacks the overhead of detecting
an RCU grace period may be amortized over.
However, because these callbacks run in a tasklet that runs at
softirq level, callback processing cannot be preempted.
Since heavy loads can result in well over a thousand RCU callbacks
per grace period,
RCU's contribution to scheduling latency can
approach 500 microseconds, which far exceeds the amount that can
be tolerated by some classes of realtime applications.
Furthermore, extreme denial-of-service workloads have been observed
to generate more than 30,000 RCU callbacks in a single grace period,
which would result in a correspondingly greater degradation of
scheduling latency.
This situation motivated some modifications to RCU, with
the goal of eliminating RCU's contribution to the excessive
scheduling latency.
This paper presents some background on RCU in
Section 2,
describes the problem that was causing excessive scheduling latency in
Section 3,
discusses three proposed solutions in
Section 4,
and evaluates the three solutions in
Section 5.
2 RCU Background
RCU is a reader-writer synchronization mechanism that takes
asymmetric distribution of synchronization
overhead to its logical extreme: read-side critical sections
incur zero synchronization overhead, containing
no locks, no atomic instructions, and, on most architectures,
no memory-barrier instructions.
RCU therefore achieves near-ideal performance for read-only workloads
on most architectures.
Write-side critical sections must therefore incur substantial
synchronization overhead, deferring destruction and maintaining
multiple versions of data structures in order to accommodate the
read-side critical sections.
In addition, writers must use some synchronization mechanism,
such as locking, to provide for orderly updates.
Readers must somehow inform writers when they finish
so that writers can
determine when it is safe to complete destructive operations.
In the Linux 2.6 kernel, RCU signals writers by non-atomically incrementing a
local counter in the context-switch code.
If this is a given CPU's first such increment for the current grace
period, then the CPU clears its bit from a global bitmask.
If it is the last CPU to clear its bit, then the end of the grace
period has been reached, and RCU callbacks may safely be invoked.
The actual implementation is more heavily optimized than is described
here.
More details are available
elsewhere [ACMS03,MSA+02,McK03].
The performance benefits of RCU in the Linux kernel are also well
documented [MAK+01,LSS02,MSS04,McK04],
and benefits of RCU and of similar synchronization techniques in other
environments have been published as
well [KL80,ML84,Pug90,MS98,GKAS99,Sei03,SAH+03].
3 RCU Scheduling Latency Problem
The amlat test program runs a realtime task that schedules
itself to run at a specific time.
The amlat test program then measures how much the actual
time is delayed from that specified.
In one test of a small configuration under heavy load,
1,660 callbacks were queued to be executed
at the end of a single grace period, resulting in a scheduling
latency of 711 microseconds on a single-CPU 2.4GHz x86 system.
This far exceeds the goal of 250 microseconds.
The heavy load consisted of filesystem and networking operations,
which resulted in large numbers of RCU callbacks being scheduled
from the dcache and IP route cache subsystems.
Note that RCU callbacks are executed in the context of a tasklet,
which runs either in interrupt context
or in the context of the ``ksoftirqd'' kernel-daemon process.
However, do_softirq(), which actually invokes the
rcu_process_callbacks() function, uses a combination
of local_irq_save() and local_bh_disable(),
which has the effect of disabling preemption across the
invocation of all RCU callbacks, even when running in
ksoftirqd context.
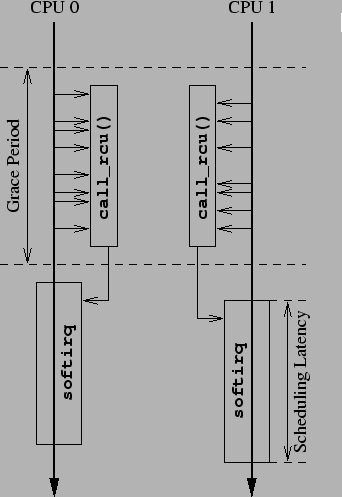
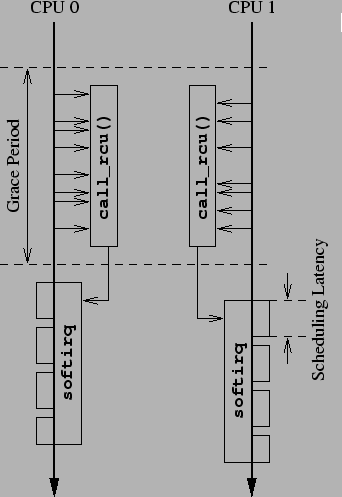
Large numbers of RCU callbacks can therefore degrade realtime
scheduling latency, as shown in
Figure 1.
In this figure, two CPUs go through a grace period while scheduling
RCU callbacks.
Each CPU's set of RCU callbacks is executed from
rcu_do_batch() in softirq context
after the end of the grace period, which directly increases
the realtime scheduling latency, as shown in the lower right
portion of the figure.
This situation raises the question of what might be done to
mitigate this latency increase, thereby preventing degradation
of realtime response.
Figure 1:
RCU Degrading Realtime Scheduling Latency
 |
4 RCU Scheduling Latency Solutions
One could also imagine solving this problem by going back to
traditional locking primitives, but this would impose unacceptable
performance degradation and scaling limitations on Linux servers.
We therefore resolved to solve the scheduling-latency problem in
such a way that RCU could be used in realtime environments.
Thus far, we are investigating three solutions to this problem:
- Providing per-CPU kernel daemons to process RCU callbacks
when there are too many to process at softirq level.
- Directly invoking the RCU callback in those cases where
it is safe to do so, rather than queuing the callback
to be executed at the end of the next grace period.
- Throttling RCU callback invocation so that only
a limited number are invoked at a given time.
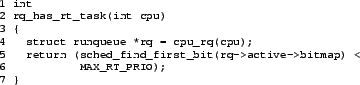
The first and last of these solutions require a mechanism that
determines when there is a runnable realtime task on a given CPU.
Such realtime tasks may be detected by checking a given runqueue's
active bitmap, as was suggested by Nick Piggin, and
as shown in
Figure 2.
The three solutions are described at length in the next sections.
Figure 2:
Functions Encapsulating Per-CPU Realtime-Task Count
 |
4.1 Per-CPU Kernel RCU-Callback Daemons
The per-CPU kernel RCU-callback daemons [Sar04a],
or krcud for short,
were inspired by the ``rcu'' implementation of the RCU
infrastructure in the Linux 2.6 kernel [MSA+02].
The idea is to modify rcu_do_batch() to
limit the number of callbacks processed at a time to
the value in module parameter rcupdate.bhlimit,
which defaults to 256, but only under the following conditions:
- the kernel has been built with the CONFIG_LOW_LATENCY
kernel parameter,
- there is a runnable realtime task on this CPU, and
- rcu_do_batch() is running from softirq context.
If either of the first two conditions do not hold, then there is no
reason to limit latency on this CPU.
If the last condition does not hold, then preemption will limit
execution time as needed, so no explicit limit checking is required.
When limiting does occur in rcu_do_batch(),
any excess callbacks are queued for processing by the CPU's krcud
on that CPU's rcudlist CPU-local variable.
These callbacks are added to the head of this list in order
to avoid any possibility of callback starvation.
Note that callbacks can be processed out of order when limiting
is in effect, since rcu_do_batch() can be invoked from
the softirq context at the end of a grace period, even when
krcud is running.
We do not know any situation where such reordering is harmful,
but strict ordering can be easily enforced should such a
situation arise.
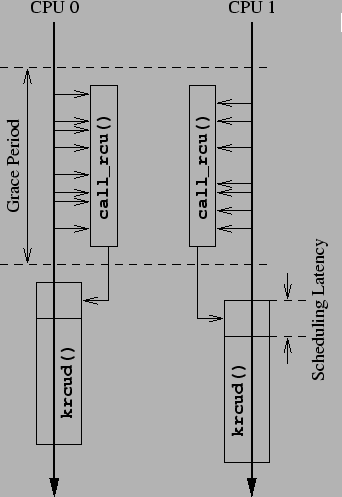
Since krcud is fully preemptible, the situation is as shown in
Figure 3.
The first few RCU callbacks are invoked from softirq context,
which cannot be preempted.
The execution time of these few RCU callbacks thus degrade
realtime scheduling latency, but only slightly, as any additional
RCU callbacks are invoked from krcud context, which is
fully preemptible.
Figure 3:
krcud Preserves Realtime Scheduling Latency
 |
The rcu_do_batch() function, which invokes RCU callback,
but limits the callback batch size when run from softirq
context, is shown in
Figure 4.
Line 6 captures the current CPU.
Note that (for once) get_cpu() is not needed:
- If invoked from krcud(), execution is forced
to remain on a single CPU via a set_cpus_allowed()
call.
- If invoked from rcu_process_callbacks(),
preemption is disabled due to running in softirq context.
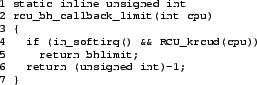
Line 7 invokes rcu_bh_callback_limit() in order
to determine the maximum number of callbacks that may be
executed, which is bhlimit if we are running
in softirq context and there is a runnable realtime task
on this CPU, or a very large integer otherwise, as can be seen in
Figure 5.
Lines 9-19 look over the callbacks, invoking each in turn
until either the list is empty or the maximum allowable number
has been exceeded.
Lines 10 and 11 remove the first element from the list, and
line 12 obtains a pointer to the struct rcu_head.
Line 13 then invokes the RCU callback.
Lines 14-18 check for exceeding the limit, but only if there is
a runnable realtime task on this CPU.
If there is, line 15 prepends the remainder of the list to this
CPU's list of callbacks that are waiting for krcud(), line 16
wakes up this CPU's krcud(), and line 17 exits the ``while''
loop.
Figure 4:
Limiting RCU Callback Batches
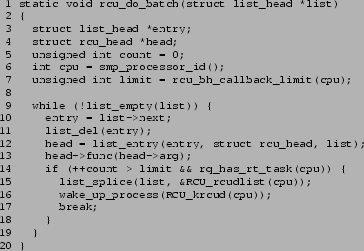 |
Figure 5:
Determining Maximum RCU Callback Batch Size
 |
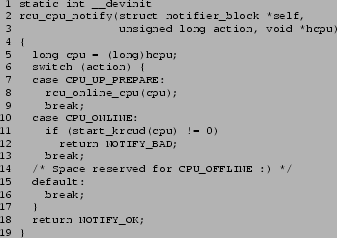
A given CPU's krcud task is created when that CPU is first
brought online by rcu_cpu_notify, as shown in
Figure 6.
CPUs are brought up in two stages, the CPU_UP_PREPARE
stage and the CPU_ONLINE stage.
The CPU_UP_PREPARE stage is handled by
lines 7-9, which invoke rcu_online_cpu(), which in
turn initializes the RCU per-CPU data and initializes the
per-CPU tasklet that processes callbacks when limiting is not
in effect.
At boot time, rcu_online_cpu() is instead called
from rcu_init().
The CPU_ONLINE stage is handled by
lines 10-13, which invoke start_krcud(), which
starts the krcud tasks if appropriate.
At boot time, start_krcud() is instead called
from rcu_late_init(), which is registered for
execution via __initcall().
Failure to start the krcud task results in failure to
start the CPU.
Figure 6:
Creating krcud Tasks: rcu_cpu_notify
 |
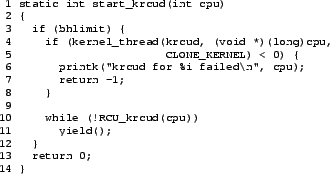
The start_krcud() function starts a krcud task for
a specified CPU, and is shown in
Figure 7.
If the module parameter bhlimit is non-zero,
the kernel thread is created by lines 4-8.
Lines 10-12 then wait until the newly created krcud
has initialized itself and is ready to accept callbacks.
This function returns 0 on success and -1 on failure.
Figure 7:
Creating krcud Tasks
 |
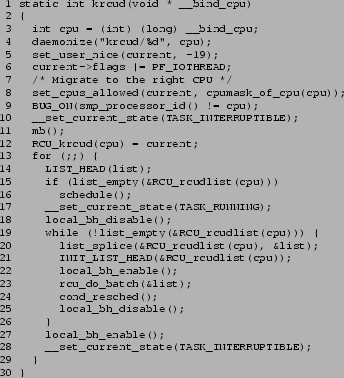
The krcud() function processes callbacks whose execution
has been deferred, and is shown in
Figure 8.
Unlike the tasklets used
by the 2.6 RCU infrastructure, krcud() invokes
the RCU callbacks preemptibly, so that RCU callback execution
from krcud() cannot degrade realtime scheduling latency.
Note that each krcud() runs only on its own CPU, so that
RCU callbacks are guaranteed never to be switched from one CPU
to another while executing.
Line 3 of krcud() casts the argument, and line 4 converts this task to a
daemon, setting the name, discarding any user-mode address space,
blocking signals, closing open files, and setting the init
task to be the newly created task's parent.
Line 5 sets the krcud task's priority to the highest non-realtime
priority.
Line 6 marks the krcud task as required for swap operations,
and line 8 restricts the task to run only on the specified CPU.
Line 10 marks the task as alive, line 11 executes a memory
barrier to prevent misordering, and line 12 sets the CPU's
krcud per-CPU variable to reference this krcud task.
Lines 13-29 loop processing any RCU callbacks placed on
the rcudlist.
Lines 15-16 wait for RCU callbacks to appear on this list,
and line 17 sets the task state to running.
Line 18 masks interrupts (which are restored by line 27),
and lines 19-26 loop processing the callbacks on this
CPU's rcudlist.
Lines 20-21 move the contents of this CPU's rcudlist
onto the local list variable,
at which point it is safe for line 22 to re-enable interrupts.
Line 23 invokes rcu_do_batch() to invoke the callbacks,
and, since we are calling it from krcud context, it will unconditionally
invoke all of them, relying on preemption to prevent undue delay of
realtime tasks.
Line 24 yields the CPU, but only if there is some other more
deserving task, as would be the case after timeslice expiration.
Line 25 then disables interrupts, setting up for the next pass through
the ``while'' loop.
As noted earlier, line 27 re-enables interrupts.
Line 28 sets up to block on the next pass through the ``for'' loop.
Figure 8:
krcud Function
 |
This approach limits the number of callbacks that may be
executed by rcu_do_batch() from softirq context.
The duration of a grace period protects against too-frequent
invocations of rcu_do_batch(), which could otherwise
result in an aggregate degradation of realtime response.
Since krcud() runs with preemption enabled, it cannot
cause excessive realtime response degradation, and, in addition,
can handle any RCU callback load up to the full capacity of the
CPU.
Further refinements under consideration include:
- Use elapsed time rather than numbers of callbacks to enforce
the limiting in rcu_do_batch().
- Dynamically varying the number of callbacks to be executed
based on workload or other measurement.
4.2 Direct Invocation of RCU Callbacks
Traditionally, most realtime and embedded systems have had but a single CPU.
Single-CPU systems can in some cases short-circuit some of the RCU processing
in some cases.
For example, if an element has just been removed from an RCU-protected
data structure, and if there are no references to this element anywhere
in the call stack, the element may safely be freed, since there is no
other CPU that can be holding any additional references.
However, it is not always possible to determine whether the call stack
is free of references.
For example, interrupt handlers can interrupt any function
that runs without masking interrupts.
Furthermore, many functions are invoked via function pointers or APIs
that might be used anywhere in the kernel.
Therefore, direct invocation of RCU callbacks cannot be applied in
all cases.
Each use of RCU must be inspected to determine whether or not that
particular use qualifies for direct invocation.
However, it turns out that the important cases of dcache and
of the IP route cache do qualify.
When running on a uniprocessor, these two subsystems can simply
immediately execute the RCU callback, so that there is no ``pileup''
of RCU callbacks at the end of the grace period.
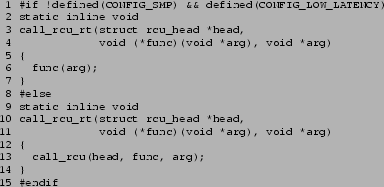
Figure 9
shows how a call_rcu_rt() primitive may be defined,
which immediately invokes the RCU callback in a realtime uniprocessor
kernel, but invokes call_rcu() otherwise [Sar03].
The new call_rcu_rt() API prevents existing call_rcu()
users from breaking, while allowing specific subsystems to use RCU
in a more realtime-friendly manner.
Figure 9:
Uniprocessor Call-Through RCU
 |
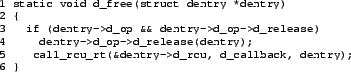
Given this primitive, the trivial change to d_free() shown in
Figure 10
renders the dcache subsystem realtime-friendly.
The single call_rcu() in dcache has simply been replaced by
call_rcu_rt().
Figure 10:
dcache Call-Through RCU
 |
The changes required to the IP route cache are more complex,
due to the fact that the route cache may be updated from
interrupt context, but is accessed from process context.
For an example of the problem that this poses, suppose that
__ip_route_output_key() is interrupted while
accessing the IP route cache in process context, and that the
interrupt handler invokes softirq upon return.
A softirq action might then delete the entry that
__ip_route_output_key() is currently referencing.
If the interrupt handler were to invoke call_rcu_rt(),
then __ip_route_output_key() would fail upon return
from interrupt.
This problem can be solved by having __ip_route_output_key()
disable softirq (and bottom-half processing) during the traversal,
similar to the manner in which preemption is already disabled.
New rcu_read_lock_bh() and rcu_read_unlock_bh()
primitives do just this, as shown in
Figure 11.
The IP route cache code
(in functions
rt_cache_get_first(),
rt_cache_get_next(),
rt_cache_get_next(),
rt_cache_seq_next(),
__ip_route_output_key(), and
ip_rt_dump())
is then changed to use these new operations
in place of rcu_read_lock() and rcu_read_unlock().
Figure 11:
Disabling softirq Processing
 |
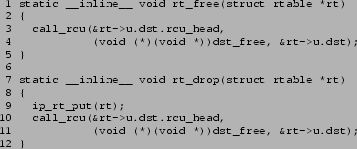
Finally, as with dcache, the rt_free() and rt_drop()
functions are changed to use call_rcu_rt() instead of
call_rcu(), as shown in
Figure 12.
Figure 12:
Freeing and Dropping IP Route Table Entries
 |
These changes are quite straightforward, but
of course this call_rcu_rt() approach works only on
single-CPU systems.
The increasing popularity of multi-threaded CPUs makes this
restriction less tenable on x86 CPUs, though it would still hold
on some embedded CPUs.
In addition, existing and planned uses of call_rcu() must
be carefully vetted in order to ensure that direct invocation of
the RCU callback is safe.
At this writing, dcache and IP route cache are the two biggest
realtime offenders, and they both are amenable to use of
call_rcu_rt(), but it is easy to imagine less fortunate
circumstances.
As a result, a realtime-friendly call_rcu() implementation
would be preferable.
4.3 Throttling of RCU Callbacks
Another solution to the realtime-degradation problem is to
throttle softirq, so that only a limited number of RCU callbacks
may execute during a given invocation of
do_softirq() [Sar04b].
This approach was independently suggested by Andrea Arcangeli,
and is illustrated in
Figure 13,
where the callbacks are executed in short bursts, limiting the
realtime scheduling-latency degradation.
Figure 13:
Throttling Preserves Realtime Scheduling Latency
 |
This solution is implemented using two additional per-CPU variables,
RCU_donelist, which is a list of RCU callbacks awaiting
invocation, and RCU_plugticks, which counts down the number
of jiffies to block RCU callback invocation.
RCU_plugticks is decremented each scheduling clock tick
on each CPU in scheduler_tick().
There are also two module parameters,
rcumaxbatch, which is the maximum number of callbacks that
may be executed in a single softirq invocation, and rcuplugticks,
which is the number of jiffies to wait after exceeding the rcumaxbatch
limit before resuming RCU callback invocation.
Note that rcuplugticks may be set to zero, in which
RCU callbacks can be run continuously, which allows easy
experimentation.
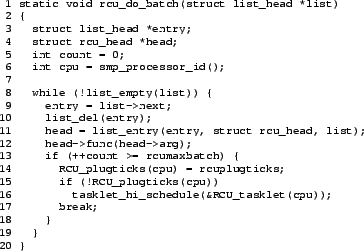
This callback limiting is enforced in rcu_do_batch(), which
is shown in Figure 14.
The differences from the stock 2.6 kernel implementation are
quite small.
Lines 5 and 6 add count and cpu variables that
count the number of RCU callbacks invoked and track the current
CPU, respectively.
Line 13 checks for too many RCU callback invocations and
line 14 sets the per-CPU RCU_plugticks variable in order
to prevent RCU callback invocation on this CPU for the next
rcuplugticks jiffies.
Line 15 checks to see if there is to be no such delay, and, if so,
line 16 reschedules the tasklet.
Figure 14:
Limiting RCU Callback Batch Size
 |
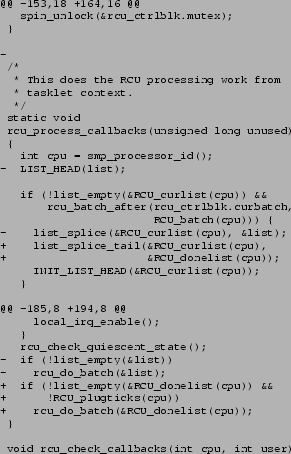
The rcu_process_callbacks() function has small modifications
to place RCU callbacks that are ready to be invoked onto the
per-CPU RCU_donelist list rather than on a local list,
and to check for RCU_plugticks.
The diffs are shown in Figure 15.
Figure 15:
Callback-Processing Changes
 |
This small set of changes relies on the fact that do_softirq()
exits after MAX_SOFTIRQ_RESTART number of iterations.
When do_softirq() is invoked from ksoftirqd(),
returning to ksoftirqd() re-enables preemption.
On the other hand, when do_softirq() is invoked from
interrupt context, returning to interrupt context in turn
results in exiting interrupt context.
Either alternative prevents rcu_do_batch() from
excessively degrading realtime response.
5 Evaluation
These three approaches were tested on a uniprocessor 2.4GHz P4
system with 256MB of RAM running dbench 32 in a loop.
The kernel was built with CONFIG_PREEMPT=y, and
the configuration excluded realtime-problematic modules such as VGA.
Realtime scheduling latency was measured using Andrew Morton's
amlat utility.
The results are shown in Table 1.
All three approaches greatly decrease realtime scheduling latency.
Although direct invocation performs
somewhat better than do the other two approaches,
the difference is not statistically significant.
Therefore, the simpler throttling approach seems preferable at
present.
Although these numbers do not meet the 250-microsecond goal, they
do indicate that RCU has been made safe for realtime environments.
Changes to other parts of Linux will be needed in order to fully
meet this goal.
Such changes are likely to expose more significant performance differences
between the three low-latency RCU approaches, so these tests should be
re-run at that time.
Table 1:
Realtime Scheduling Latencies
| Configuration |
Latency (microseconds) |
Standard Deviation |
| Base 2.6.0 |
811.0 |
85.26 |
| krcud |
406.4 |
17.87 |
| Direct Invocation |
393.0 |
37.18 |
| Throttle |
414.8 |
37.83 |
|
Note that although the current testing techniques are not sufficient to
validate the Linux 2.6 kernel for use by hard-realtime applications
on which lives depend, they do demonstrate usefulness
to soft realtime applications, even those requiring deep sub-millisecond
realtime response.
Future work includes applying realtime modifications to RCU
in order to better withstand denial-of-service attacks,
including taking full-network-adaptor-speed attacks while still
providing good response to console input and user commands.
It is likely that successfully withstanding such attacks will
require additional work on the softirq layer in order to ensure
that user processes are allowed to run even when the attack
is sufficient to consume the entire system with softirq processing.
Of course, Linux will require more work if it is to meet more
stringent realtime scheduling latencies, to say nothing of
hard realtime requirements.
Since some realtime applications require 10-microsecond scheduling
latencies, it will be interesting to see if Linux can meet these
applications' needs without sacrificing its usefulness to other
workloads or its simplicity.
We owe thanks to Robert Love and Andrew Morton, who brought this
problem to our attention.
We are indebted to Andrew Morton for the amlat application that
measures realtime scheduling latency, and to Jon Walpole and to
Orran Krieger for many valuable discussions regarding RCU.
We are grateful to Tom Hanrahan, Vijay Sukthankar, Daniel Frye,
Jai Menon, and Juergen Deicke for their support of this effort.
RCU is freely available as part of the Linux 2.6 kernel from
ftp://kernel.org/pub/linux/kernel/v2.6.
The patches described in this paper are freely available from
any archive of the Linux Kernel Mailing List.
Legal Statement
This work represents the view of the author and does not necessarily
represent the view of IBM.
Linux is a registered trademark of Linus Torvalds.
Other company, product, and service names may be trademarks or service marks
of others.
- ACMS03
-
Andrea Arcangeli, Mingming Cao, Paul E. McKenney, and Dipankar Sarma.
Using read-copy update techniques for System V IPC in the Linux
2.5 kernel.
In Proceedings of the 2003 USENIX Annual Technical Conference
(FREENIX Track), June 2003.
- GKAS99
-
Ben Gamsa, Orran Krieger, Jonathan Appavoo, and Michael Stumm.
Tornado: Maximizing locality and concurrency in a shared memory
multiprocessor operating system.
In Proceedings of the 3rd Symposium on Operating System Design
and Implementation, New Orleans, LA, February 1999.
- KL80
-
H. T. Kung and Q. Lehman.
Concurrent maintenance of binary search trees.
ACM Transactions on Database Systems, 5(3):354-382, September
1980.
- LSS02
-
Hanna Linder, Dipankar Sarma, and Maneesh Soni.
Scalability of the directory entry cache.
In Ottawa Linux Symposium, pages 289-300, June 2002.
- MAK+01
-
Paul E. McKenney, Jonathan Appavoo, Andi Kleen, Orran Krieger, Rusty Russell,
Dipankar Sarma, and Maneesh Soni.
Read-copy update.
In Ottawa Linux Symposium, July 2001.
- McK03
-
Paul E. McKenney.
Using RCU in the Linux 2.5 kernel.
Linux Journal, 1(114):18-26, October 2003.
- McK04
-
Paul E. McKenney.
Exploiting Deferred Destruction: An Analysis of Read-Copy-Update
Techniques in Operating System Kernels (in preparation).
PhD thesis, Oregon Graduate Institute of Science and Technology,
2004.
- ML84
-
Udi Manber and Richard E. Ladner.
Concurrency control in a dynamic search structure.
ACM Transactions on Database Systems, 9(3):439-455, September
1984.
- MS98
-
Paul E. McKenney and John D. Slingwine.
Read-copy update: Using execution history to solve concurrency
problems.
In Parallel and Distributed Computing and Systems, pages
509-518, Las Vegas, NV, October 1998.
- MSA+02
-
Paul E. McKenney, Dipankar Sarma, Andrea Arcangeli, Andi Kleen, Orran Krieger,
and Rusty Russell.
Read-copy update.
In Ottawa Linux Symposium, pages 338-367, June 2002.
- MSS04
-
Paul E. McKenney, Dipankar Sarma, and Maneesh Soni.
Scaling dcache with RCU.
Linux Journal, 1(118), January 2004.
- Pug90
-
William Pugh.
Concurrent maintenance of skip lists.
Technical Report CS-TR-2222.1, Institute of Advanced Computer Science
Studies, Department of Computer Science, University of Maryland, College
Park, Maryland, June 1990.
- SAH+03
-
Craig A. N. Soules, Jonathan Appavoo, Kevin Hui, Dilma Da Silva, Gregory R.
Ganger, Orran Krieger, Michael Stumm, Robert W. Wisniewski, Marc Auslander,
Michal Ostrowski, Bryan Rosenburg, and Jimi Xenidis.
System support for online reconfiguration.
In Proceedings of the 2003 USENIX Annual Technical Conference,
June 2003.
- Sar03
-
Dipankar Sarma.
Rcu low latency patches.
Message ID: 20031222180114.GA2248@in.ibm.com, December 2003.
- Sar04a
-
Dipankar Sarma.
[patch] rcu for low latency (experimental).
https://marc.theaimsgroup.com/?l=linux-kernel&m=108003746402892&w=2,
March 2004.
- Sar04b
-
Dipankar Sarma.
Re: [patch] rcu for low latency (experimental).
https://marc.theaimsgroup.com/?l=linux-kernel&m=108016474829546&w=2,
March 2004.
- Sei03
-
Joseph W. Seigh II.
Read copy update.
email correspondence, March 2003.
|
