
OSDI '06 Paper
Pp. 307–320 of the Proceedings
Ceph: A Scalable, High-Performance Distributed File System
Ceph: A Scalable, High-Performance Distributed File System
Sage A. Weil,
Scott A. Brandt,
Ethan L. Miller,
Darrell D. E. Long,
Carlos Maltzahn
University of California, Santa Cruz
{sage, scott, elm, darrell, carlosm}@cs.ucsc.edu
Abstract
We have developed Ceph, a distributed file system that provides
excellent performance, reliability, and scalability. Ceph maximizes
the separation between data and metadata management by replacing
allocation tables with a pseudo-random data distribution function
(CRUSH) designed for heterogeneous and dynamic clusters of unreliable
object storage devices (OSDs). We leverage device intelligence by
distributing data replication, failure detection and recovery to
semi-autonomous OSDs running a specialized local object file system.
A dynamic distributed metadata cluster provides extremely efficient
metadata management and seamlessly adapts to a wide range of general
purpose and scientific computing file system workloads. Performance
measurements under a variety of workloads show that Ceph has excellent
I/O performance and scalable metadata management, supporting more than
250,000 metadata operations per second.
1 Introduction
System designers have long sought to improve the performance of file
systems, which have proved critical to the overall performance of an
exceedingly broad class of applications. The scientific and
high-performance computing communities in particular have driven
advances in the performance and scalability of distributed storage
systems, typically predicting more general purpose needs by a few
years. Traditional solutions, exemplified by
NFS [20], provide a straightforward model in which
a server exports a file system hierarchy that clients can map into
their local name space. Although widely used, the centralization
inherent in the client/server model has proven a significant obstacle
to scalable performance.
More recent distributed file systems have adopted architectures based
on object-based storage, in which conventional hard disks are replaced
with intelligent object storage devices (OSDs) which combine a CPU,
network interface, and local cache with an underlying disk or
RAID [4,7,8,32,35].
OSDs replace the traditional block-level interface with one in which
clients can read or write byte ranges to much larger (and often
variably sized) named objects, distributing low-level block allocation
decisions to the devices themselves. Clients typically interact with
a metadata server (MDS) to perform metadata operations (open,
rename), while communicating directly with OSDs to perform file
I/O (reads and writes), significantly improving overall scalability.
Systems adopting this model continue to suffer from scalability
limitations due to little or no distribution of the metadata
workload. Continued reliance on traditional file system principles
like allocation lists and inode tables and a reluctance to delegate
intelligence to the OSDs have further limited scalability and
performance, and increased the cost of reliability.
We present Ceph, a distributed file system that provides excellent
performance and reliability while promising unparalleled scalability. Our
architecture is based on the assumption that systems at the petabyte
scale are inherently dynamic: large systems are inevitably
built incrementally, node failures are the norm rather than the
exception, and the quality and character of workloads are constantly
shifting over time.
Ceph decouples data and metadata operations by eliminating file
allocation tables and replacing them with generating functions. This
allows Ceph to leverage the intelligence present in OSDs to distribute
the complexity surrounding data access, update serialization,
replication and reliability, failure detection, and recovery. Ceph
utilizes a highly adaptive distributed metadata cluster architecture
that dramatically improves the scalability of metadata access, and
with it, the scalability of the entire system. We discuss the goals
and workload assumptions motivating our choices in the design of the
architecture, analyze their impact on system scalability and
performance, and relate our experiences in implementing a
functional system prototype.
2 System Overview
The Ceph file system has three main components: the client, each
instance of which exposes a near-POSIX file system interface to a host
or process; a cluster of OSDs, which collectively stores all data and
metadata; and a metadata server cluster, which manages the
namespace (file names and directories) while coordinating security,
consistency and coherence (see Figure 1). We
say the Ceph interface is near-POSIX because we find it
appropriate to extend the interface and selectively relax consistency
semantics in order to better align with the needs of applications
and to improve system performance.
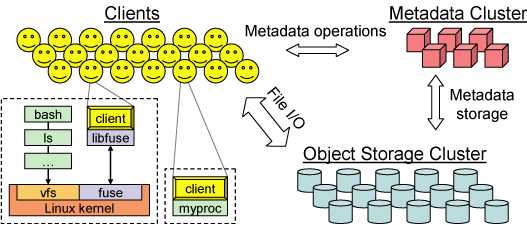 Figure 1: System architecture. Clients perform file I/O by
communicating directly with OSDs. Each process can either link
directly to a client instance or interact with a mounted
file system.
Figure 1: System architecture. Clients perform file I/O by
communicating directly with OSDs. Each process can either link
directly to a client instance or interact with a mounted
file system.
The primary goals of the architecture are scalability (to hundreds of
petabytes and beyond), performance, and reliability. Scalability is
considered in a variety of dimensions, including the overall storage
capacity and throughput of the system, and performance in terms of
individual clients, directories, or files. Our target workload may
include such extreme cases as tens or hundreds of thousands of hosts
concurrently reading from or writing to the same file or creating
files in the same directory.
Such scenarios, common in scientific
applications running on supercomputing clusters, are increasingly
indicative of tomorrow's general purpose workloads.
More importantly,
we recognize that distributed file system workloads are inherently
dynamic, with significant variation in data and metadata access as
active applications and data sets change over time. Ceph directly
addresses the issue of scalability while simultaneously achieving high
performance, reliability and availability through three fundamental
design features: decoupled data and metadata, dynamic
distributed metadata management, and reliable autonomic distributed object
storage.
Decoupled Data and Metadata-Ceph maximizes the
separation of file metadata management from the storage of file
data. Metadata operations (open, rename, etc.) are
collectively managed by a metadata server cluster, while clients
interact directly with OSDs to perform file I/O (reads and writes).
Object-based storage has long promised to improve the scalability of
file systems by delegating low-level block allocation decisions to
individual devices. However, in contrast to existing object-based
file
systems [4,7,8,32]
which replace long per-file block lists with shorter object lists,
Ceph eliminates allocation lists entirely. Instead, file data is
striped onto predictably named objects, while a special-purpose
data distribution function called CRUSH [29]
assigns objects to storage devices. This allows any party to
calculate (rather than look up) the name and location of objects
comprising a file's contents, eliminating the need to maintain and
distribute object lists, simplifying the design of the system, and
reducing the metadata cluster workload.
Dynamic Distributed Metadata Management-Because file
system metadata operations make up as much as half of typical file
system workloads [22], effective metadata
management is critical to overall system performance. Ceph utilizes a
novel metadata cluster architecture based on Dynamic Subtree
Partitioning [30] that adaptively and intelligently
distributes responsibility for managing the file system directory
hierarchy among tens or even hundreds of MDSs. A (dynamic)
hierarchical partition preserves locality in each MDS's workload,
facilitating efficient updates and aggressive prefetching to improve
performance for common workloads. Significantly, the workload
distribution among metadata servers is based entirely on current
access patterns, allowing Ceph to effectively utilize available MDS
resources under any workload and achieve near-linear scaling in the
number of MDSs.
Reliable Autonomic Distributed Object Storage-Large
systems composed of many thousands of devices are inherently dynamic:
they are built incrementally, they grow and contract as new storage is
deployed and old devices are decommissioned, device failures are
frequent and expected, and large volumes of data are created, moved,
and deleted. All of these factors require that the distribution of
data evolve to effectively utilize available resources and maintain
the desired level of data replication. Ceph delegates responsibility
for data migration, replication, failure detection, and failure
recovery to the cluster of OSDs that store the data, while at a high
level, OSDs collectively provide a single logical object store to
clients and metadata servers. This approach allows Ceph to more
effectively leverage the intelligence (CPU and memory) present on each
OSD to achieve reliable, highly available object storage with linear
scaling.
We describe the operation of the Ceph client,
metadata server cluster, and distributed object store, and how they
are affected by the critical features of our architecture.
We also describe the status of our prototype.
3 Client Operation
We introduce the overall operation of Ceph's components and their
interaction with applications by describing Ceph's client
operation. The Ceph client runs on each host executing application
code and exposes a file system interface to applications. In the Ceph
prototype, the client code runs entirely in user space and can be
accessed either by linking to it directly or as a mounted file system
via FUSE [25] (a user-space file system
interface). Each client maintains its own file data cache, independent
of the kernel page or buffer caches, making it accessible to
applications that link to the client directly.
3.1 File I/O and Capabilities
When a process opens a file, the client sends a request to the MDS
cluster. An MDS traverses the file system hierarchy to translate the
file name into the file inode, which includes a unique inode
number, the file owner, mode, size, and other per-file metadata. If
the file exists and access is granted, the MDS returns the inode
number, file size, and information about the striping strategy used to
map file data into objects. The MDS may also issue the client a
capability (if it does not already have one) specifying which
operations are permitted. Capabilities currently include four bits
controlling the client's ability to read, cache reads, write, and
buffer writes. In the future, capabilities will include security keys
allowing clients to prove to OSDs that they are authorized to read or
write data [13,19] (the prototype
currently trusts all clients). Subsequent MDS involvement in file I/O is limited to managing
capabilities to preserve file consistency and achieve proper
semantics.
Ceph generalizes a range of striping strategies to map file data onto
a sequence of objects.
To avoid any need for file allocation metadata, object names simply
combine the file inode number and the stripe number. Object replicas
are then assigned to OSDs using CRUSH, a globally known mapping
function (described in Section 5.1). For example, if one
or more clients open a file for read access, an MDS grants them
the capability to read and cache file content. Armed with the inode
number, layout, and file size, the clients can name and locate all
objects containing file data and read directly from the OSD cluster.
Any objects or byte ranges that don't exist are defined to be file
"holes," or zeros. Similarly, if a client opens a file for writing,
it is granted the capability to write with buffering, and any data it
generates at any offset in the file is simply written to the
appropriate object on the appropriate OSD. The client relinquishes
the capability on file close and provides the MDS with the new file
size (the largest offset written), which redefines the set of objects
that (may) exist and contain file data.
3.2 Client Synchronization
POSIX semantics sensibly require that reads reflect any data
previously written, and that writes are atomic (i. e., the result of
overlapping, concurrent writes will reflect a particular order of
occurrence). When a file is opened by multiple clients with either
multiple writers or a mix of readers and writers, the MDS will revoke
any previously issued read caching and write buffering capabilities,
forcing client I/O for that file to be synchronous. That is, each
application read or write operation will block until it is
acknowledged by the OSD, effectively placing the burden of update
serialization and synchronization with the OSD storing each object.
When writes span object boundaries, clients acquire exclusive locks on
the affected objects (granted by their respective OSDs), and
immediately submit the write and unlock operations to achieve the
desired serialization. Object locks are similarly used to mask
latency for large writes by acquiring locks and flushing data
asynchronously.
Not surprisingly, synchronous I/O can be a performance killer for
applications, particularly those doing small reads or writes, due to
the latency penalty-at least one round-trip to the OSD. Although
read-write sharing is relatively rare in general-purpose
workloads [22], it is more common in scientific
computing applications [27], where performance is often
critical. For this reason, it is often desirable to relax consistency
at the expense of strict standards conformance in situations where
applications do not rely on it. Although Ceph supports such
relaxation via a global switch, and many other distributed file
systems punt on this issue [20], this is an
imprecise and unsatisfying solution: either performance suffers, or
consistency is lost system-wide.
For precisely this reason, a set of high performance computing
extensions to the POSIX I/O interface have been proposed by the
high-performance computing (HPC)
community [31], a subset of which are implemented by Ceph. Most
notably, these include an O_LAZY flag for open that
allows applications to explicitly relax the usual coherency
requirements for a shared-write
file. Performance-conscious applications which
manage their own consistency (e. g., by writing to different parts of the
same file, a common pattern in HPC workloads [27]) are
then allowed to buffer writes or cache reads when I/O would otherwise
be performed synchronously. If desired, applications can then
explicitly synchronize with two additional calls:
lazyio_ propagate will flush a given byte range to the object
store, while lazyio_ synchronize will ensure that the effects of
previous propagations are reflected in any subsequent reads.
The Ceph
synchronization model thus retains its simplicity by providing correct
read-write and shared-write semantics between clients via synchronous
I/O, and extending the application interface to relax consistency for
performance conscious distributed applications.
3.3 Namespace Operations
Client interaction with the file system namespace is managed by the
metadata server cluster. Both read operations (e. g., readdir,
stat) and updates (e. g., unlink, chmod) are
synchronously applied by the MDS to ensure serialization, consistency,
correct security, and safety. For simplicity, no metadata locks or
leases are issued to clients. For HPC workloads in particular, callbacks
offer minimal upside at a high potential cost in complexity.
Instead, Ceph optimizes for the most common metadata access scenarios.
A readdir followed by a stat of each file (e. g., ls
-l) is an extremely common access pattern and notorious performance
killer in large directories. A readdir in Ceph requires only a
single MDS request, which fetches the entire directory, including
inode contents. By default, if a readdir is immediately
followed by one or more stats, the briefly cached information
is returned; otherwise it is discarded. Although this relaxes
coherence slightly in that an intervening inode modification may go
unnoticed, we gladly make this trade for vastly improved performance.
This behavior is explicitly captured by the
readdirplus [31] extension, which returns lstat results
with directory entries (as some OS-specific implementations
of getdir already do).
Ceph could allow consistency to be further relaxed by caching metadata
longer, much like earlier versions of NFS, which typically cache for
30 seconds. However, this approach breaks coherency in a way that is
often critical to applications, such as those using stat to
determine if a file has been updated-they either behave incorrectly,
or end up waiting for old cached values to time out.
We opt instead to again provide correct behavior and extend the
interface in instances where it adversely affects performance. This
choice is most clearly illustrated by a stat operation on a file
currently opened by multiple clients for writing. In order to return
a correct file size and modification time, the MDS revokes any write
capabilities to momentarily stop updates and collect up-to-date size
and mtime values from all writers. The highest values are returned
with the stat reply, and capabilities are reissued to allow
further progress. Although stopping multiple writers may seem
drastic, it is necessary to ensure proper serializability. (For a
single writer, a correct value can be retrieved from the writing
client without interrupting progress.) Applications for which
coherent behavior is unnecesssary-victims of a POSIX interface that
doesn't align with their needs-can use
statlite [31], which takes a bit mask specifying
which inode fields are not required to be coherent.
4 Dynamically Distributed Metadata
Metadata operations often make up as much as half of file system
workloads [22] and lie in the critical path, making
the MDS cluster critical to overall performance. Metadata
management also presents a critical scaling challenge in distributed
file systems: although capacity and aggregate I/O rates can scale
almost arbitrarily with the addition of more storage devices, metadata
operations involve a greater degree of interdependence that makes
scalable consistency and coherence management more difficult.
File and directory metadata in Ceph is very small, consisting almost
entirely of directory entries (file names) and inodes (80 bytes).
Unlike conventional file systems, no file allocation metadata is
necessary-object names are constructed using the inode number, and
distributed to OSDs using CRUSH. This simplifies the metadata
workload and allows our MDS to efficiently manage a very large working
set of files, independent of file sizes. Our design further
seeks to minimize metadata related disk I/O through the use of a
two-tiered storage strategy, and to maximize locality and cache
efficiency with Dynamic Subtree Partitioning [30].
4.1 Metadata Storage
Although the MDS cluster aims to satisfy most requests from
its in-memory cache, metadata updates must be committed to
disk for safety. A set of large, bounded, lazily flushed journals
allows each MDS to quickly stream its updated metadata to the OSD cluster in an
efficient and distributed manner. The per-MDS journals, each
many hundreds of megabytes, also absorb repetitive metadata
updates (common to most workloads) such that when old journal entries
are eventually flushed to long-term storage, many are already
rendered obsolete.
Although MDS recovery is not yet implemented
by our prototype, the journals are designed such that in the event of
an MDS failure, another node can quickly rescan the journal to
recover the critical contents of the failed node's in-memory
cache (for quick startup) and in doing so recover the file
system state.
This strategy provides the best of both worlds: streaming updates to
disk in an efficient (sequential) fashion, and a vastly reduced
re-write workload, allowing the long-term on-disk storage layout to be
optimized for future read access. In particular, inodes are embedded
directly within directories, allowing the MDS to prefetch entire
directories with a single OSD read request and exploit the high degree
of directory locality present in most
workloads [22]. Each directory's content is
written to the OSD cluster using the same striping and distribution
strategy as metadata journals and file data. Inode numbers are
allocated in ranges to metadata servers and considered
immutable in our prototype, although in the future they could be
trivially reclaimed on file deletion. An auxiliary anchor
table [28] keeps the rare inode with multiple
hard links globally addressable by inode number-all without
encumbering the overwhelmingly common case of singly-linked files with
an enormous, sparsely populated and cumbersome
inode table.
4.2 Dynamic Subtree Partitioning
Our primary-copy caching strategy makes a single
authoritative MDS responsible for managing cache coherence and
serializing updates for any given piece of metadata.
While most existing distributed file systems employ some form of
static subtree-based partitioning to delegate this authority (usually
forcing an administrator to carve the dataset into smaller static
"volumes"), some recent and experimental file systems have used
hash functions to distribute directory and file
metadata [4], effectively sacrificing locality for
load distribution. Both approaches have critical limitations: static
subtree partitioning fails to cope with dynamic workloads and data
sets, while hashing destroys metadata locality and critical
opportunities for efficient metadata prefetching and storage.
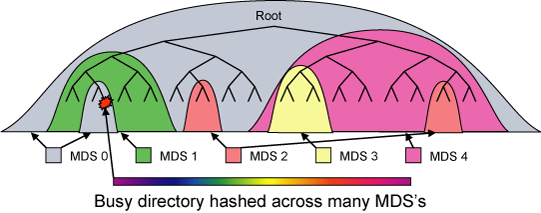 Figure 2: Ceph dynamically maps subtrees of the directory hierarchy
to metadata servers based on the current workload. Individual
directories are hashed across multiple nodes only when
they become hot spots.
Figure 2: Ceph dynamically maps subtrees of the directory hierarchy
to metadata servers based on the current workload. Individual
directories are hashed across multiple nodes only when
they become hot spots.
Ceph's MDS cluster is based on a dynamic subtree partitioning
strategy [30] that adaptively distributes cached metadata
hierarchically across a set of nodes, as illustrated in
Figure 2. Each MDS measures the popularity of metadata
within the directory hierarchy using counters with an exponential time
decay. Any operation increments the counter on the affected inode and
all of its ancestors up to the root directory, providing each MDS with
a weighted tree describing the recent load distribution. MDS load
values are periodically compared, and appropriately-sized subtrees of
the directory hierarchy are migrated to keep the workload evenly
distributed. The combination of shared long-term storage and
carefully constructed namespace locks allows such migrations to
proceed by transferring the appropriate contents of the in-memory
cache to the new authority, with minimal impact on coherence locks or
client capabilities. Imported metadata is written to the new MDS's
journal for safety, while additional journal entries on both ends
ensure that the transfer of authority is invulnerable to intervening
failures (similar to a two-phase commit). The resulting subtree-based
partition is kept coarse to minimize prefix replication overhead and
to preserve locality.
When metadata is replicated across multiple MDS nodes, inode contents
are separated into three groups, each with different consistency
semantics: security (owner, mode), file (size, mtime), and immutable
(inode number, ctime, layout). While immutable fields never change,
security and file locks are governed by independent finite state
machines, each with a different set of states and transitions designed
to accommodate different access and update patterns while minimizing
lock contention. For example, owner and mode are required for the
security check during path traversal but rarely change, requiring very
few states, while the file lock reflects a wider range of client
access modes as it controls an MDS's ability to issue client
capabilities.
4.3 Traffic Control
Partitioning the directory hierarchy across multiple nodes can balance
a broad range of workloads, but cannot always cope with hot spots or
flash crowds, where many clients access the same directory or file.
Ceph uses its knowledge of metadata popularity to provide a wide
distribution for hot spots only when needed and without incurring the
associated overhead and loss of directory locality in the general
case. The contents of heavily read directories (e. g., many opens) are
selectively replicated across multiple nodes to distribute load.
Directories that are particularly large or experiencing a heavy write
workload (e. g., many file creations) have their contents hashed by file
name across the cluster, achieving a balanced distribution at the
expense of directory locality. This adaptive approach allows Ceph to
encompass a broad spectrum of partition granularities, capturing the
benefits of both coarse and fine partitions in the specific
circumstances and portions of the file system where those strategies
are most effective.
Every MDS response provides the client with updated information about the
authority and any replication of the relevant inode and its ancestors,
allowing clients to learn the metadata partition for the parts of the
file system with which they interact. Future metadata operations are
directed at the authority (for updates) or a random replica
(for reads) based on the deepest known prefix of a given path.
Normally clients learn the locations of unpopular
(unreplicated) metadata and are able to contact the appropriate MDS
directly. Clients accessing popular metadata, however, are
told the metadata reside either on different or multiple MDS nodes,
effectively bounding the number of clients believing any particular
piece of metadata resides on any particular MDS, dispersing potential
hot spots and flash crowds before they occur.
5 Distributed Object Storage
From a high level, Ceph clients and metadata servers view the object
storage cluster (possibly tens or hundreds of thousands of OSDs) as a
single logical object store and namespace. Ceph's
Reliable Autonomic Distributed Object Store (RADOS) achieves linear
scaling in both capacity and aggregate performance by delegating
management of object replication, cluster expansion, failure detection
and recovery to OSDs in a distributed fashion.
5.1 Data Distribution with CRUSH
Ceph must distribute petabytes of data among an evolving cluster of
thousands of storage devices such that device storage and bandwidth
resources are effectively utilized. In order to avoid imbalance
(e. g., recently deployed devices mostly idle or empty) or load
asymmetries (e. g., new, hot data on new devices only), we adopt a
strategy that distributes new data randomly, migrates a
random subsample of existing data to new devices, and uniformly
redistributes data from removed devices. This stochastic approach is
robust in that it performs equally well under any potential workload.
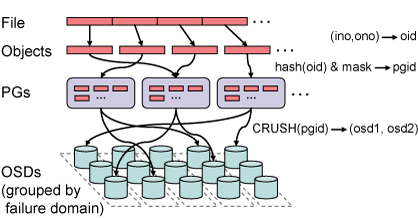 Figure 3: Files are striped across many objects, grouped into
placement groups (PGs), and distributed to OSDs via CRUSH, a
specialized replica placement function.
Figure 3: Files are striped across many objects, grouped into
placement groups (PGs), and distributed to OSDs via CRUSH, a
specialized replica placement function.
Ceph first maps objects into placement groups (PGs) using a
simple hash function, with an adjustable bit mask to control the
number of PGs. We choose a value that gives each OSD on the
order of 100 PGs to balance variance in OSD utilizations with the
amount of replication-related metadata maintained by each OSD.
Placement groups are then assigned to OSDs using CRUSH (Controlled
Replication Under Scalable Hashing) [29], a pseudo-random
data distribution function that efficiently maps each PG to an ordered
list of OSDs upon which to store object replicas. This differs from
conventional approaches (including other object-based file systems) in
that data placement does not rely on any block or object list
metadata. To locate any object, CRUSH requires only the placement
group and an OSD cluster map: a compact, hierarchical
description of the devices comprising the storage cluster. This
approach has two key advantages: first, it is completely distributed
such that any party (client, OSD, or MDS) can independently calculate
the location of any object; and second, the map is infrequently
updated, virtually eliminating any exchange of distribution-related
metadata. In doing so, CRUSH simultaneously solves both the data
distribution problem ("where should I store data") and the data
location problem ("where did I store data"). By design, small
changes to the storage cluster have little impact on existing PG
mappings, minimizing data migration due to device failures or cluster
expansion.
The cluster map hierarchy is structured to align with the clusters
physical or logical composition and potential sources of failure. For
instance, one might form a four-level hierarchy for an installation
consisting of shelves full of OSDs, rack cabinets full of shelves, and
rows of cabinets. Each OSD also has a weight value to control the
relative amount of data it is assigned. CRUSH maps PGs onto OSDs
based on placement rules, which define the level of replication
and any constraints on placement. For example, one might replicate
each PG on three OSDs, all situated in the same row (to limit
inter-row replication traffic) but separated into different cabinets
(to minimize exposure to a power circuit or edge switch failure). The
cluster map also includes a list of down or inactive devices and an
epoch number, which is incremented each time the map changes. All OSD
requests are tagged with the client's map epoch, such that all parties
can agree on the current distribution of data. Incremental map
updates are shared between cooperating OSDs, and piggyback on OSD
replies if the client's map is out of date.
5.2 Replication
In contrast to systems like Lustre [4], which assume
one can construct sufficiently reliable OSDs using mechanisms like
RAID or fail-over on a SAN, we assume that in a petabyte or exabyte
system failure will be the norm rather than the exception, and at any
point in time several OSDs are likely to be inoperable. To maintain
system availability and ensure data safety in a scalable fashion,
RADOS manages its own replication of data using a variant of
primary-copy replication [2], while taking steps to
minimize the impact on performance.
Data is replicated in terms of placement groups, each of which is
mapped to an ordered list of n OSDs (for n-way replication).
Clients send all writes to the first non-failed OSD in an object's PG
(the primary), which assigns a new version number for the object
and PG and forwards the write to any additional replica OSDs.
After each replica has applied the update and responded to the
primary, the primary applies the update locally and the write is
acknowledged to the client. Reads are directed at the primary. This
approach spares the client of any of the complexity surrounding
synchronization or serialization between replicas, which can be
onerous in the presence of other writers or failure recovery. It also
shifts the bandwidth consumed by replication from the client to the
OSD cluster's internal network, where we expect greater resources to
be available. Intervening replica OSD failures are ignored, as any
subsequent recovery (see Section 5.5) will reliably
restore replica consistency.
5.3 Data Safety
In distributed storage systems, there are essentially two reasons why
data is written to shared storage. First, clients are interested in
making their updates visible to other clients. This should be quick:
writes should be visible as soon as possible, particularly when
multiple writers or mixed readers and writers force clients to operate
synchronously. Second, clients are interested in knowing definitively
that the data they've written is safely replicated, on disk, and will
survive power or other failures. RADOS disassociates synchronization
from safety when acknowledging updates, allowing Ceph to realize both
low-latency updates for efficient application synchronization and
well-defined data safety semantics.
Figure 4 illustrates the messages sent during an
object write. The primary forwards the update to replicas, and
replies with an ack after it is applied to all OSDs' in-memory
buffer caches, allowing synchronous POSIX calls on the client to
return. A final commit is sent (perhaps many seconds later)
when data is safely committed to disk. We send the ack to the
client only after the update is fully replicated to seamlessly
tolerate the failure of any single OSD, even though this increases
client latency. By default, clients also buffer writes until they
commit to avoid data loss in the event of a simultaneous power loss to
all OSDs in the placement group. When recovering in such cases, RADOS allows the replay
of previously acknowledged (and thus ordered) updates for a fixed
interval before new updates are accepted.
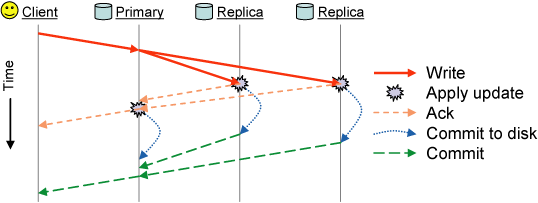 Figure 4: RADOS responds with an ack after the
write has been applied to the buffer caches on all OSDs
replicating the object. Only after it has been safely committed
to disk is a final commit notification sent to the client.
Figure 4: RADOS responds with an ack after the
write has been applied to the buffer caches on all OSDs
replicating the object. Only after it has been safely committed
to disk is a final commit notification sent to the client.
5.4 Failure Detection
Timely failure detection is critical to maintaining data safety, but
can become difficult as a cluster scales to many thousands of devices.
For certain failures, such as disk errors or corrupted data, OSDs can
self-report. Failures that make an OSD unreachable on the network,
however, require active monitoring, which RADOS distributes by having
each OSD monitor those peers with which it shares PGs. In most cases,
existing replication traffic serves as a passive confirmation of
liveness, with no additional communication overhead. If an OSD has
not heard from a peer recently, an explicit ping is sent.
RADOS considers two dimensions of OSD liveness: whether the OSD is
reachable, and whether it is assigned data by CRUSH. An unresponsive
OSD is initially marked down, and any primary responsibilities
(update serialization, replication) temporarily pass to the next
OSD in each of its placement groups. If the OSD does not quickly
recover, it is marked out of the data distribution, and
another OSD joins each PG to re-replicate its contents. Clients which
have pending operations with a failed OSD simply resubmit to the new
primary.
Because a wide variety of network anomalies may cause intermittent
lapses in OSD connectivity, a small cluster of monitors collects
failure reports and filters out transient or systemic problems (like a
network partition) centrally. Monitors (which are only partially
implemented) use elections, active peer monitoring, short-term leases,
and two-phase commits to collectively provide consistent and available
access to the cluster map. When the map is updated to reflect any
failures or recoveries, affected OSDs are provided incremental map
updates, which then spread throughout the cluster by piggybacking on
existing inter-OSD communication. Distributed detection allows fast
detection without unduly burdening monitors, while resolving the
occurrence of inconsistency with centralized arbitration. Most
importantly, RADOS avoids initiating widespread data re-replication
due to systemic problems by marking OSDs down but not out
(e. g., after a power loss to half of all OSDs).
5.5 Recovery and Cluster Updates
The OSD cluster map will change due to OSD failures, recoveries, and
explicit cluster changes such as the deployment of new storage. Ceph
handles all such changes in the same way. To facilitate fast recovery,
OSDs maintain a version number for each object and a log of recent
changes (names and versions of updated or deleted objects) for each
PG (similar to the replication logs in Harp [14]) .
When an active OSD receives an updated cluster map, it iterates over
all locally stored placement groups and calculates the CRUSH
mapping to determine which ones it is responsible for, either as a
primary or replica. If a PG's membership has changed, or if the OSD has
just booted, the OSD must peer with the PG's other OSDs. For
replicated PGs, the OSD provides the primary with its current PG version
number. If the OSD is the primary for the PG, it collects current
(and former) replicas' PG versions. If the primary lacks the most
recent PG state, it retrieves the log of recent PG changes (or a
complete content summary, if needed) from current or prior OSDs in the
PG in order to determine the correct (most recent) PG contents. The
primary then sends each replica an incremental log update (or complete
content summary, if needed), such that all parties know what the PG
contents should be, even if their locally stored object set may
not match. Only after the primary determines the correct PG state and
shares it with any replicas is I/O to objects in the PG permitted.
OSDs are then independently responsible for retrieving missing or
outdated objects from their peers. If an OSD receives a request for a
stale or missing object, it delays processing and moves that object to
the front of the recovery queue.
For example, suppose osd1 crashes and is marked down, and
osd2 takes over as primary for pgA. If osd1
recovers, it will request the latest map on boot, and a monitor will
mark it as up. When osd2 receives the resulting map
update, it will realize it is no longer primary for pgA and send
the pgA version number to osd1. osd1 will retrieve
recent pgA log entries from osd2, tell osd2 its
contents are current, and then begin processing requests while any
updated objects are recovered in the background.
Because failure recovery is driven entirely by individual OSDs, each
PG affected by a failed OSD will recover in parallel to (very likely)
different replacement OSDs. This approach, based on the Fast Recovery
Mechanism (FaRM) [37], decreases recovery times
and improves overall data safety.
5.6 Object Storage with EBOFS
Although a variety of distributed file systems use local file systems
like ext3 to manage low-level
storage [4,12], we found their
interface and performance to be poorly suited for object
workloads [27]. The existing kernel interface limits our
ability to understand when object updates are safely committed on
disk. Synchronous writes or journaling provide the desired
safety, but only with a heavy latency and performance penalty. More
importantly, the POSIX interface fails to support atomic data and
metadata (e. g., attribute) update transactions, which are important for
maintaining RADOS consistency.
Instead, each Ceph OSD manages its local object storage with EBOFS, an
Extent and B-tree based Object File System. Implementing EBOFS
entirely in user space and interacting directly with a raw block
device allows us to define our own low-level object storage interface
and update semantics, which separate update serialization (for
synchronization) from on-disk commits (for safety). EBOFS supports
atomic transactions (e. g., writes and attribute updates on
multiple objects), and update
functions return when the in-memory caches are updated, while
providing asynchronous notification of commits.
A user space approach, aside from providing greater flexibility and
easier implementation, also avoids cumbersome interaction with the
Linux VFS and page cache, both of which were designed for a different
interface and workload. While most kernel file systems lazily flush
updates to disk after some time interval, EBOFS aggressively schedules
disk writes, and opts instead to cancel pending I/O operations when
subsequent updates render them superfluous. This provides our
low-level disk scheduler with longer I/O queues and a corresponding
increase in scheduling efficiency. A user-space scheduler also makes
it easier to eventually prioritize workloads (e. g., client I/O versus
recovery) or provide quality of service guarantees [36].
Central to the EBOFS design is a robust, flexible, and fully integrated
B-tree service that is used to locate objects on disk, manage block
allocation, and index collections (placement groups).
Block allocation is conducted in terms of extents-start and length
pairs-instead of block lists, keeping metadata compact. Free block
extents on disk are binned by size and sorted by location, allowing
EBOFS to quickly locate free space near the write position or related
data on disk, while also limiting long-term fragmentation. With the
exception of per-object block allocation information, all metadata is
kept in memory for performance and simplicity (it is quite small, even for large volumes).
Finally, EBOFS aggressively performs copy-on-write: with the exception
of superblock updates, data is always written to unallocated regions
of disk.
6 Performance and Scalability Evaluation
We evaluate our prototype under a range of microbenchmarks to
demonstrate its performance, reliability, and scalability.
In all tests, clients, OSDs, and MDSs are user processes
running on a dual-processor Linux cluster with SCSI disks and
communicating using TCP. In general, each OSD or MDS runs on its own
host, while tens or hundreds of client instances may share the same
host while generating workload.
6.1 Data Performance
EBOFS provides superior performance and safety semantics, while the
balanced distribution of data generated by CRUSH and the delegation of
replication and failure recovery allow aggregate I/O performance to
scale with the size of the OSD cluster.
6.1.1 OSD Throughput
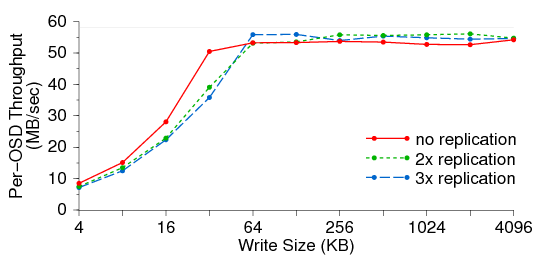 Figure 5: Per-OSD write performance. The horizontal line indicates the upper
limit imposed by the physical disk. Replication has minimal
impact on OSD throughput, although if the number of OSDs is fixed,
n-way replication reduces total effective throughput by a factor
of n because replicated data must be written to n OSDs.
Figure 5: Per-OSD write performance. The horizontal line indicates the upper
limit imposed by the physical disk. Replication has minimal
impact on OSD throughput, although if the number of OSDs is fixed,
n-way replication reduces total effective throughput by a factor
of n because replicated data must be written to n OSDs.
We begin by measuring the I/O performance of a 14-node cluster of
OSDs. Figure 5 shows per-OSD throughput (y) with varying
write sizes (x) and replication. Workload is generated by 400
clients on 20 additional nodes. Performance is ultimately limited by
the raw disk bandwidth (around 58 MB/sec), shown by the horizontal
line.
Replication doubles or triples disk I/O, reducing client data rates
accordingly when the number of OSDs is fixed.
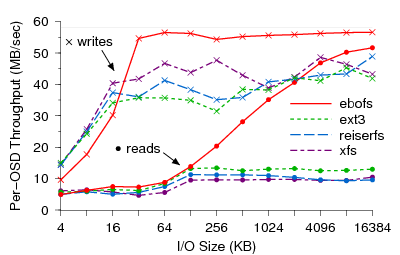 Figure 6: Performance of EBOFS compared to general-purpose file
systems. Although small writes suffer from coarse locking in our
prototype, EBOFS nearly saturates the disk for writes larger
than 32 KB. Since EBOFS lays out data in large extents when it is
written in large increments, it has significantly better read
performance.
Figure 6: Performance of EBOFS compared to general-purpose file
systems. Although small writes suffer from coarse locking in our
prototype, EBOFS nearly saturates the disk for writes larger
than 32 KB. Since EBOFS lays out data in large extents when it is
written in large increments, it has significantly better read
performance.
Figure 6 compares the performance of EBOFS to that
of general-purpose file systems (ext3, ReiserFS, XFS) in handling a
Ceph workload. Clients synchronously write out large files, striped over
16 MB objects, and read them back again. Although small read and write performance in EBOFS
suffers from coarse threading and locking, EBOFS very nearly saturates
the available disk bandwidth for writes sizes larger than 32 KB, and
significantly outperforms the others for read workloads because data
is laid out in extents on disk that match the write sizes-even when
they are very large. Performance was measured using a fresh file system.
Experience with an earlier EBOFS design suggests it will experience
significantly lower fragmentation than ext3, but we have not yet
evaluated the current implementation on an aged file system. In any
case, we expect the performance of EBOFS after aging to be no worse than the
others.
6.1.2 Write Latency
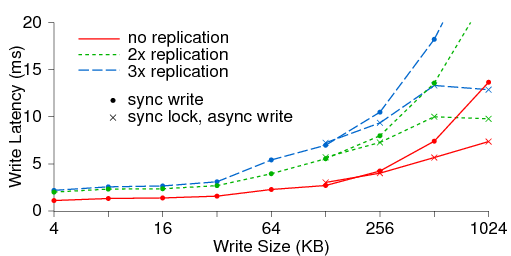 Figure 7: Write latency for varying write sizes and replication.
More than two replicas incurs minimal additional cost for small
writes because replicated updates occur concurrently. For large
synchronous writes, transmission times dominate. Clients partially
mask that latency for writes over 128 KB by acquiring exclusive
locks and asynchronously flushing the data.
Figure 7: Write latency for varying write sizes and replication.
More than two replicas incurs minimal additional cost for small
writes because replicated updates occur concurrently. For large
synchronous writes, transmission times dominate. Clients partially
mask that latency for writes over 128 KB by acquiring exclusive
locks and asynchronously flushing the data.
Figure 7 shows the synchronous write latency (y) for
a single writer with varying write sizes (x) and replication.
Because the primary OSD simultaneously retransmits updates to all
replicas, small writes incur a minimal latency increase for more than
two replicas. For larger writes, the cost of retransmission
dominates; 1 MB writes (not shown) take 13 ms for one replica, and
2.5 times longer (33 ms) for three. Ceph clients partially mask this
latency for synchronous writes over 128 KB by acquiring exclusive
locks and then asynchronously flushing the data to disk.
Alternatively, write-sharing applications can opt to use
O_LAZY. With consistency thus relaxed, clients can buffer
small writes and submit only large, asynchronous writes to OSDs; the
only latency seen by applications will be due to clients which fill
their caches waiting for data to flush to disk.
6.1.3 Data Distribution and Scalability
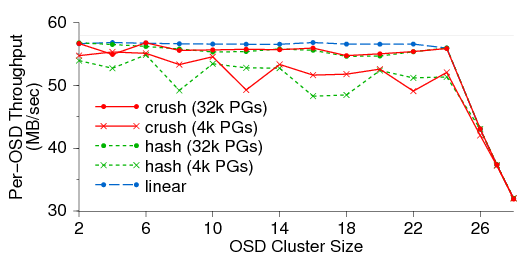 Figure 8: OSD write performance scales linearly with the size of the
OSD cluster until the switch is saturated at 24 OSDs. CRUSH and
hash performance improves when more PGs lower variance in OSD
utilization.
Figure 8: OSD write performance scales linearly with the size of the
OSD cluster until the switch is saturated at 24 OSDs. CRUSH and
hash performance improves when more PGs lower variance in OSD
utilization.
Ceph's data performance scales nearly linearly in the number of
OSDs. CRUSH distributes data pseudo-randomly such that OSD
utilizations can be accurately modeled by a binomial or normal
distribution-what one expects from a perfectly random
process [29]. Variance in utilizations decreases as the
number of groups increases: for 100 placement groups per OSD the
standard deviation is 10%; for 1000 groups it is 3%.
Figure 8 shows per-OSD write throughput as the
cluster scales using CRUSH, a simple hash function, and a linear
striping strategy to distribute data in 4096 or 32768 PGs among
available OSDs. Linear striping balances load perfectly for maximum
throughput to provide a benchmark for comparison, but like a simple
hash function, it fails to cope with device failures or other OSD
cluster changes. Because data placement with CRUSH or a hash is
stochastic, throughputs are lower with fewer PGs: greater variance in
OSD utilizations causes request queue lengths to drift apart under our
entangled client workload. Because devices can become overfilled or
overutilized with small probability, dragging down performance, CRUSH
can correct such situations by offloading any fraction of the
allocation for OSDs specially marked in the cluster map. Unlike the
hash and linear strategies, CRUSH also minimizes data migration under
cluster expansion while maintaining a balanced distribution. CRUSH
calculations are O(logn) (for a cluster of n OSDs) and take only
tens of microseconds, allowing clusters to grow to hundreds of
thousands of OSDs.
6.2 Metadata Performance
Ceph's MDS cluster offers enhanced POSIX semantics with excellent
scalability. We measure performance via a partial workload lacking
any data I/O; OSDs in these experiments are used solely for metadata
storage.
6.2.1 Metadata Update Latency
We first consider the latency associated with metadata updates (e. g.,
mknod or mkdir). A single client creates a series of
files and directories which the MDS must synchronously journal to a
cluster of OSDs for safety. We consider both a diskless MDS, where
all metadata is stored in a shared OSD cluster, and one which also has
a local disk serving as the primary OSD for its journal.
Figure 9(a) shows the latency (y) associated with
metadata updates in both cases with varying metadata replication (x)
(where zero corresponds to no journaling at all). Journal entries are
first written to the primary OSD and then replicated to any additional
OSDs. With a local disk, the initial hop from the MDS to the (local)
primary OSD takes minimal time, allowing update latencies for 2×
replication similar to 1× in the diskless model. In both cases, more
than two replicas incurs little additional latency because replicas
update in parallel.
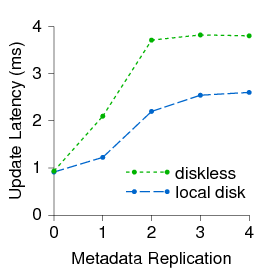
(a) Metadata update latency for an MDS with and without a local
disk. Zero corresponds to no journaling.
|
(b) Cumulative time consumed during a file system walk.
|
Figure 9:
Using a local disk lowers the write latency by avoiding the
initial network round-trip. Reads benefit from caching, while
readdirplus or relaxed consistency eliminate MDS
interaction for stats following readdir.
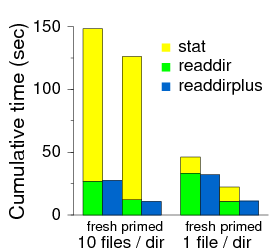
6.2.2 Metadata Read Latency
The behavior of metadata reads (e. g., readdir, stat,
open) is more complex. Figure 9(b) shows cumulative
time (y) consumed by a client walking 10,000 nested directories with
a readdir in each directory and a stat on each file. A
primed MDS cache reduces readdir times. Subsequent stats
are not affected, because inode contents are embedded in directories,
allowing the full directory contents to be fetched into the MDS cache
with a single OSD access. Ordinarily, cumulative stat times
would dominate for larger directories. Subsequent MDS interaction can
be eliminated by using readdirplus, which explicitly bundles
stat and readdir results in a single operation, or by
relaxing
POSIX to allow stats immediately following a
readdir to be served from client caches (the default).
6.2.3 Metadata Scaling
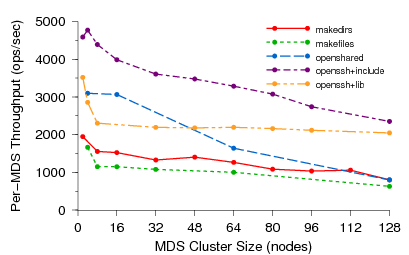 Figure 10: Per-MDS throughput under a variety of workloads and cluster
sizes. As the cluster grows to 128 nodes, efficiency drops no more
than 50% below perfect linear (horizontal) scaling for most
workloads, allowing vastly improved performance over existing
systems.
Figure 10: Per-MDS throughput under a variety of workloads and cluster
sizes. As the cluster grows to 128 nodes, efficiency drops no more
than 50% below perfect linear (horizontal) scaling for most
workloads, allowing vastly improved performance over existing
systems.
We evaluate metadata scalability using a 430 node partition of the
alc Linux cluster at Lawrence Livermore National Laboratory
(LLNL). Figure 10 shows per-MDS throughput (y) as
a function of MDS cluster size (x), such that a horizontal line
represents perfect linear scaling. In the makedirs workload,
each client creates a tree of nested directories four levels deep,
with ten files and subdirectories in each directory. Average MDS
throughput drops from 2000 ops per MDS per second with a small cluster, to
about 1000 ops per MDS per second (50% efficiency) with 128 MDSs
(over 100,000 ops/sec total). In the makefiles workload, each
client creates thousands of files in the same directory. When the
high write levels are detected, Ceph hashes the shared directory and
relaxes the directory's mtime coherence to distribute the
workload across all MDS nodes. The openshared workload
demonstrates read sharing by having each client repeatedly open and
close ten shared files. In the openssh workloads, each client
replays a captured file system trace of a compilation in a private
directory. One variant uses a shared /lib for moderate sharing,
while the other shares /usr/include, which is very heavily read.
The openshared and openssh+include workloads have the
heaviest read sharing and show the worst scaling behavior, we believe
due to poor replica selection by clients. openssh+lib scales
better than the trivially separable makedirs because it contains
relatively few metadata modifications and little sharing. Although we
believe that contention in the network or threading in our messaging
layer further lowered performance for larger MDS clusters, our limited
time with dedicated access to the large cluster prevented a more
thorough investigation.
Figure 11 plots latency (y) versus per-MDS
throughput (x)
for a 4-, 16-, and 64-node MDS cluster under the makedirs
workload. Larger clusters have imperfect load distributions,
resulting in lower average per-MDS throughput (but, of course, much
higher total throughput) and slightly higher latencies.
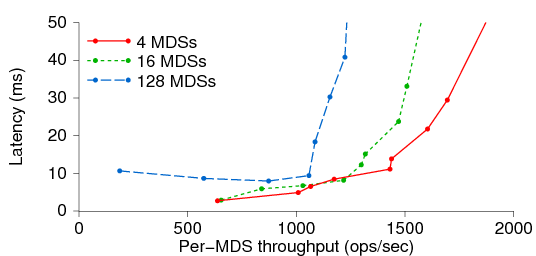 Figure 11: Average latency versus per-MDS throughput for
different cluster sizes (makedirs workload).
Figure 11: Average latency versus per-MDS throughput for
different cluster sizes (makedirs workload).
Despite imperfect linear scaling, a 128-node MDS cluster running our
prototype can service more than a quarter million metadata operations
per second (128 nodes at 2000 ops/sec). Because metadata transactions
are independent of data I/O and metadata size is independent of file
size, this corresponds to installations with potentially many hundreds
of petabytes of storage or more, depending on average file size. For
example, scientific applications creating checkpoints on LLNL's
Bluegene/L might involve 64 thousand nodes with two processors each
writing to separate files in the same directory (as in the
makefiles workload). While the current storage system peaks at 6,000
metadata ops/sec and would take minutes to complete each checkpoint, a
128-node Ceph MDS cluster could finish in two seconds. If each file
were only 10 MB (quite small by HPC standards) and OSDs sustain
50 MB/sec, such a cluster could write 1.25 TB/sec, saturating at
least 25,000 OSDs (50,000 with replication). 250 GB OSDs would put
such a system at more than six petabytes. More importantly, Ceph's
dynamic metadata distribution allows an MDS cluster (of any
size) to reallocate resources based on the current workload, even when
all clients access metadata previously assigned to a single MDS,
making it significantly more versatile and adaptable than any static
partitioning strategy.
7 Experiences
We were pleasantly surprised by the extent to which replacing file
allocation metadata with a distribution function became a simplifying
force in our design. Although this placed greater demands on the
function itself, once we realized exactly what those requirements
were, CRUSH was able to deliver the necessary scalability,
flexibility, and reliability. This vastly simplified our metadata
workload while providing both clients and OSDs with complete and
independent knowledge of the data distribution. The latter enabled us
to delegate responsibility for data replication, migration, failure
detection, and recovery to OSDs, distributing these mechanisms in
a way that effectively leveraged their bundled CPU and memory. RADOS
has also opened the door to a range of future enhancements that
elegantly map onto our OSD model, such as bit error detection (as in
the Google File System [7]) and dynamic replication
of data based on workload (similar to AutoRAID [34]).
Although it was tempting to use existing kernel file systems for local
object storage (as many other systems have
done [4,7,9]), we
recognized early on that a file system tailored for object workloads
could offer better performance [27]. What we did not
anticipate was the disparity between the existing file system
interface and our requirements, which became evident while developing
the RADOS replication and reliability mechanisms. EBOFS was
surprisingly quick to develop in user-space, offered very satisfying
performance, and exposed an interface perfectly suited to our
requirements.
One of the largest lessons in Ceph was the importance of the MDS load
balancer to overall scalability, and the complexity of
choosing what metadata to migrate where and when. Although in
principle our design and goals seem quite simple, the reality of
distributing an evolving workload over a hundred MDSs
highlighted additional subtleties. Most notably,
MDS performance has a wide range of
performance bounds, including CPU, memory (and cache
efficiency), and network or I/O limitations, any of which may
limit performance at any point in time. Furthermore, it is
difficult to quantitatively capture the balance between total
throughput and fairness; under certain circumstances unbalanced
metadata distributions can increase overall
throughput [30].
Implementation of the client interface posed a greater challenge than
anticipated. Although the use of FUSE vastly simplified
implementation by avoiding the kernel, it introduced its own
set of idiosyncrasies. DIRECT_IO bypassed kernel page cache
but didn't support mmap, forcing us to modify FUSE to
invalidate clean pages as a workaround. FUSE's
insistence on performing its own security checks
results in copious getattrs (stats) for even simple
application calls. Finally, page-based I/O between kernel and user
space limits overall I/O rates. Although linking directly to the client
avoids FUSE issues, overloading system calls in user space introduces
a new set of issues (most of which we have yet to fully examine),
making an in-kernel client module inevitable.
8 Related Work
High-performance scalable file systems have long been a goal of the
HPC community, which tends to place a heavy load on the file
system [18,27]. Although many file
systems attempt to meet this need, they do not provide the same level
of scalability that Ceph does. Large-scale systems like
OceanStore [11] and Farsite [1]
are designed to provide petabytes of highly reliable storage, and can
provide simultaneous access to thousands of separate files to
thousands of clients, but cannot provide high-performance access to a
small set of files by tens of thousands of cooperating clients due to
bottlenecks in subsystems such as name lookup. Conversely,
parallel file and storage systems such as Vesta [6],
Galley [17],
PVFS [12],
and Swift [5] have extensive support for striping
data across multiple disks to achieve very high transfer rates,
but lack strong support for scalable metadata access or robust
data distribution for high reliability. For example, Vesta permits
applications to lay their data out on disk, and allows independent
access to file data on each disk without reference to shared metadata.
However, like many other parallel file systems, Vesta does not
provide scalable support for metadata lookup. As a result, these file
systems typically provide poor performance on workloads that access
many small files or require many metadata operations. They also
typically suffer from block allocation issues: blocks are either
allocated centrally or
via a lock-based mechanism, preventing them from scaling well for
write requests from thousands of clients to thousands of disks.
GPFS [24] and StorageTank [16]
partially decouple metadata and data management, but are limited by
their use of block-based disks and their metadata distribution
architecture.
Grid-based file systems such as LegionFS [33] are
designed to coordinate wide-area access and are not optimized for high
performance in the local file system. Similarly, the Google File
System [7] is optimized for very large files and a
workload consisting largely of reads and file appends. Like
Sorrento [26], it targets a narrow class of applications
with non-POSIX semantics.
Recently, many file systems and platforms, including Federated Array
of Bricks (FAB) [23] and
pNFS [9] have been designed around network
attached storage [8]. Lustre [4],
the Panasas file system [32], zFS [21],
Sorrento, and Kybos [35] are based on the object-based
storage paradigm [3] and most closely resemble Ceph.
However, none of these systems has the combination of scalable and
adaptable metadata management, reliability and fault tolerance that
Ceph provides. Lustre and Panasas in particular fail to delegate
responsibility to OSDs, and have limited support for efficient
distributed metadata management, limiting their scalability and
performance. Further, with the exception of Sorrento's use of
consistent hashing [10], all of these
systems use explicit allocation maps to specify where objects are
stored, and have limited support for rebalancing when new storage is
deployed. This can lead to load asymmetries and poor resource
utilization, while Sorrento's hashed distribution lacks CRUSH's
support for efficient data migration, device weighting, and
failure domains.
9 Future Work
Some core Ceph elements have not yet been implemented, including MDS
failure recovery and several POSIX calls. Two security architecture
and protocol variants are under consideration, but neither have yet
been implemented [13,19]. We also
plan on investigating the practicality of client callbacks on
namespace to inode translation metadata. For static regions of the
file system, this could allow opens (for read) to occur without MDS
interaction. Several other MDS enhancements are planned, including
the ability to create snapshots of arbitrary subtrees of the directory
hierarchy [28].
Although Ceph dynamically replicates metadata when flash crowds
access single directories or files, the same is not yet true of file
data. We plan to allow OSDs to dynamically adjust the level of
replication for individual objects based on workload, and to
distribute read traffic across multiple OSDs in the placement group.
This will allow scalable access to small amounts of data, and may
facilitate fine-grained OSD load balancing using a mechanism similar to
D-SPTF [15].
Finally, we are working on developing a quality of service
architecture to allow both aggregate class-based traffic
prioritization and OSD-managed reservation based bandwidth and latency
guarantees. In addition to supporting applications with QoS
requirements, this will help balance RADOS replication and recovery
operations with regular workload. A number of other EBOFS
enhancements are planned, including improved allocation logic, data
scouring, and checksums or other bit-error detection mechanisms to
improve data safety.
10 Conclusions
Ceph addresses three critical challenges of storage
systems-scalability, performance, and reliability-by occupying a
unique point in the design space. By shedding design assumptions like
allocation lists found in nearly all existing systems, we maximally
separate data from metadata management, allowing them to scale
independently. This separation relies on CRUSH, a data distribution
function that generates a pseudo-random distribution, allowing clients
to calculate object locations instead of looking them up. CRUSH
enforces data replica separation across failure domains for improved
data safety while efficiently coping with the inherently dynamic
nature of large storage clusters, where devices failures, expansion
and cluster restructuring are the norm.
RADOS leverages intelligent OSDs to manage data replication, failure
detection and recovery, low-level disk allocation, scheduling, and
data migration without encumbering any central server(s). Although
objects can be considered files and stored in a general-purpose file
system, EBOFS provides more appropriate semantics and superior
performance by addressing the specific workloads and interface
requirements present in Ceph.
Finally, Ceph's metadata management architecture addresses one of the
most vexing problems in highly scalable storage-how to efficiently
provide a single uniform directory hierarchy obeying POSIX semantics
with performance that scales with the number of metadata servers.
Ceph's dynamic subtree partitioning is a uniquely scalable approach,
offering both efficiency and the ability to adapt to varying
workloads.
Ceph is licensed under the LGPL and is available at
https://ceph.sourceforge.net/.
Acknowledgments
This work was performed under the auspices of the U.S. Department of
Energy by the University of California, Lawrence Livermore National
Laboratory under Contract W-7405-Eng-48. Research was funded in part
by the Lawrence Livermore, Los Alamos, and Sandia National
Laboratories. We would like to thank Bill Loewe, Tyce McLarty, Terry
Heidelberg, and everyone else at LLNL who talked to us about their
storage trials and tribulations, and who helped facilitate our two
days of dedicated access time on alc. We would also like to
thank IBM for donating the 32-node cluster that aided in much of the
OSD performance testing, and the National Science Foundation, which paid
for the switch upgrade. Chandu Thekkath (our shepherd), the anonymous
reviewers, and Theodore Wong all provided valuable feedback, and we
would also like to thank the students, faculty, and sponsors of the
Storage Systems Research Center for their input and support.
References
- [1]
-
A. Adya, W. J. Bolosky, M. Castro, R. Chaiken, G. Cermak, J. R. Douceur,
J. Howell, J. R. Lorch, M. Theimer, and R. Wattenhofer.
FARSITE: Federated, available, and reliable storage for an
incompletely trusted environment.
In Proceedings of the 5th Symposium on Operating Systems Design
and Implementation (OSDI), Boston, MA, Dec. 2002. USENIX.
- [2]
-
P. A. Alsberg and J. D. Day.
A principle for resilient sharing of distributed resources.
In Proceedings of the 2nd International Conference on Software
Engineering, pages 562-570. IEEE Computer Society Press, 1976.
- [3]
-
A. Azagury, V. Dreizin, M. Factor, E. Henis, D. Naor, N. Rinetzky, O. Rodeh,
J. Satran, A. Tavory, and L. Yerushalmi.
Towards an object store.
In Proceedings of the 20th IEEE / 11th NASA Goddard Conference
on Mass Storage Systems and Technologies, pages 165-176, Apr. 2003.
- [4]
-
P. J. Braam.
The Lustre storage architecture.
https://www.lustre.org/documentation.html, Cluster File Systems, Inc.,
Aug. 2004.
- [5]
-
L.-F. Cabrera and D. D. E. Long.
Swift: Using distributed disk striping to provide high I/O data
rates.
Computing Systems, 4(4):405-436, 1991.
- [6]
-
P. F. Corbett and D. G. Feitelson.
The Vesta parallel file system.
ACM Transactions on Computer Systems, 14(3):225-264, 1996.
- [7]
-
S. Ghemawat, H. Gobioff, and S.-T. Leung.
The Google file system.
In Proceedings of the 19th ACM Symposium on Operating Systems
Principles (SOSP '03), Bolton Landing, NY, Oct. 2003. ACM.
- [8]
-
G. A. Gibson, D. F. Nagle, K. Amiri, J. Butler, F. W. Chang, H. Gobioff,
C. Hardin, E. Riedel, D. Rochberg, and J. Zelenka.
A cost-effective, high-bandwidth storage architecture.
In Proceedings of the 8th International Conference on
Architectural Support for Programming Languages and Operating Systems
(ASPLOS), pages 92-103, San Jose, CA, Oct. 1998.
- [9]
-
D. Hildebrand and P. Honeyman.
Exporting storage systems in a scalable manner with pNFS.
Technical Report CITI-05-1, CITI, University of Michigan, Feb. 2005.
- [10]
-
D. Karger, E. Lehman, T. Leighton, M. Levine, D. Lewin, and R. Panigrahy.
Consistent hashing and random trees: Distributed caching protocols
for relieving hot spots on the World Wide Web.
In ACM Symposium on Theory of Computing, pages 654-663, May
1997.
- [11]
-
J. Kubiatowicz, D. Bindel, Y. Chen, P. Eaton, D. Geels, R. Gummadi, S. Rhea,
H. Weatherspoon, W. Weimer, C. Wells, and B. Zhao.
OceanStore: An architecture for global-scale persistent storage.
In Proceedings of the 9th International Conference on
Architectural Support for Programming Languages and Operating Systems
(ASPLOS), Cambridge, MA, Nov. 2000. ACM.
- [12]
-
R. Latham, N. Miller, R. Ross, and P. Carns.
A next-generation parallel file system for Linux clusters.
LinuxWorld, pages 56-59, Jan. 2004.
- [13]
-
A. Leung and E. L. Miller.
Scalable security for large, high performance storage systems.
In Proceedings of the 2006 ACM Workshop on Storage Security and
Survivability. ACM, Oct. 2006.
- [14]
-
B. Liskov, S. Ghemawat, R. Gruber, P. Johnson, L. Shrira, and M. Williams.
Replication in the Harp file system.
In Proceedings of the 13th ACM Symposium on Operating Systems
Principles (SOSP '91), pages 226-238. ACM, 1991.
- [15]
-
C. R. Lumb, G. R. Ganger, and R. Golding.
D-SPTF: Decentralized request distribution in brick-based storage
systems.
In Proceedings of the 11th International Conference on
Architectural Support for Programming Languages and Operating Systems
(ASPLOS), pages 37-47, Boston, MA, 2004.
- [16]
-
J. Menon, D. A. Pease, R. Rees, L. Duyanovich, and B. Hillsberg.
IBM Storage Tank-a heterogeneous scalable SAN file system.
IBM Systems Journal, 42(2):250-267, 2003.
- [17]
-
N. Nieuwejaar and D. Kotz.
The Galley parallel file system.
In Proceedings of 10th ACM International Conference on
Supercomputing, pages 374-381, Philadelphia, PA, 1996. ACM Press.
- [18]
-
N. Nieuwejaar, D. Kotz, A. Purakayastha, C. S. Ellis, and M. Best.
File-access characteristics of parallel scientific workloads.
IEEE Transactions on Parallel and Distributed Systems,
7(10):1075-1089, Oct. 1996.
- [19]
-
C. A. Olson and E. L. Miller.
Secure capabilities for a petabyte-scale object-based distributed
file system.
In Proceedings of the 2005 ACM Workshop on Storage Security and
Survivability, Fairfax, VA, Nov. 2005.
- [20]
-
B. Pawlowski, C. Juszczak, P. Staubach, C. Smith, D. Lebel, and D. Hitz.
NFS version 3: Design and implementation.
In Proceedings of the Summer 1994 USENIX Technical Conference,
pages 137-151, 1994.
- [21]
-
O. Rodeh and A. Teperman.
zFS-a scalable distributed file system using object disks.
In Proceedings of the 20th IEEE / 11th NASA Goddard Conference
on Mass Storage Systems and Technologies, pages 207-218, Apr. 2003.
- [22]
-
D. Roselli, J. Lorch, and T. Anderson.
A comparison of file system workloads.
In Proceedings of the 2000 USENIX Annual Technical Conference,
pages 41-54, San Diego, CA, June 2000. USENIX Association.
- [23]
-
Y. Saito, S. Frølund, A. Veitch, A. Merchant, and S. Spence.
FAB: Building distributed enterprise disk arrays from commodity
components.
In Proceedings of the 11th International Conference on
Architectural Support for Programming Languages and Operating Systems
(ASPLOS), pages 48-58, 2004.
- [24]
-
F. Schmuck and R. Haskin.
GPFS: A shared-disk file system for large computing clusters.
In Proceedings of the 2002 Conference on File and Storage
Technologies (FAST), pages 231-244. USENIX, Jan. 2002.
- [25]
-
M. Szeredi.
File System in User Space.
https://fuse.sourceforge.net, 2006.
- [26]
-
H. Tang, A. Gulbeden, J. Zhou, W. Strathearn, T. Yang, and L. Chu.
A self-organizing storage cluster for parallel data-intensive
applications.
In Proceedings of the 2004 ACM/IEEE Conference on Supercomputing
(SC '04), Pittsburgh, PA, Nov. 2004.
- [27]
-
F. Wang, Q. Xin, B. Hong, S. A. Brandt, E. L. Miller, D. D. E. Long, and T. T.
McLarty.
File system workload analysis for large scale scientific computing
applications.
In Proceedings of the 21st IEEE / 12th NASA Goddard Conference
on Mass Storage Systems and Technologies, pages 139-152, College Park, MD,
Apr. 2004.
- [28]
-
S. A. Weil.
Scalable archival data and metadata management in object-based file
systems.
Technical Report SSRC-04-01, University of California, Santa Cruz,
May 2004.
- [29]
-
S. A. Weil, S. A. Brandt, E. L. Miller, and C. Maltzahn.
CRUSH: Controlled, scalable, decentralized placement of replicated
data.
In Proceedings of the 2006 ACM/IEEE Conference on Supercomputing
(SC '06), Tampa, FL, Nov. 2006. ACM.
- [30]
-
S. A. Weil, K. T. Pollack, S. A. Brandt, and E. L. Miller.
Dynamic metadata management for petabyte-scale file systems.
In Proceedings of the 2004 ACM/IEEE Conference on Supercomputing
(SC '04). ACM, Nov. 2004.
- [31]
-
B. Welch.
POSIX IO extensions for HPC.
In Proceedings of the 4th USENIX Conference on File and Storage
Technologies (FAST), Dec. 2005.
- [32]
-
B. Welch and G. Gibson.
Managing scalability in object storage systems for HPC Linux
clusters.
In Proceedings of the 21st IEEE / 12th NASA Goddard Conference
on Mass Storage Systems and Technologies, pages 433-445, Apr. 2004.
- [33]
-
B. S. White, M. Walker, M. Humphrey, and A. S. Grimshaw.
LegionFS: A secure and scalable file system supporting cross-domain
high-performance applications.
In Proceedings of the 2001 ACM/IEEE Conference on Supercomputing
(SC '01), Denver, CO, 2001.
- [34]
-
J. Wilkes, R. Golding, C. Staelin, and T. Sullivan.
The HP AutoRAID hierarchical storage system.
In Proceedings of the 15th ACM Symposium on Operating Systems
Principles (SOSP '95), pages 96-108, Copper Mountain, CO, 1995. ACM Press.
- [35]
-
T. M. Wong, R. A. Golding, J. S. Glider, E. Borowsky, R. A. Becker-Szendy,
C. Fleiner, D. R. Kenchammana-Hosekote, and O. A. Zaki.
Kybos: self-management for distributed brick-base storage.
Research Report RJ 10356, IBM Almaden Research Center, Aug. 2005.
- [36]
-
J. C. Wu and S. A. Brandt.
The design and implementation of AQuA: an adaptive quality of
service aware object-based storage device.
In Proceedings of the 23rd IEEE / 14th NASA Goddard Conference
on Mass Storage Systems and Technologies, pages 209-218, College Park, MD,
May 2006.
- [37]
-
Q. Xin, E. L. Miller, and T. J. E. Schwarz.
Evaluation of distributed recovery in large-scale storage systems.
In Proceedings of the 13th IEEE International Symposium on High
Performance Distributed Computing (HPDC), pages 172-181, Honolulu, HI, June
2004.
|

