Experiences Building PlanetLab
Larry Peterson, Andy Bavier, Marc E. Fiuczynski, Steve Muir
Department of Computer Science
Princeton University
Abstract. This paper reports our experiences building
PlanetLab over the last four years. It identifies the requirements
that shaped PlanetLab, explains the design decisions that resulted
from resolving conflicts among these requirements, and reports our
experience implementing and supporting the system. Due in large part
to the nature of the ``PlanetLab experiment,'' the discussion focuses
on synthesis rather than new techniques, balancing system-wide
considerations rather than improving performance along a single
dimension, and learning from feedback from a live system rather than
controlled experiments using synthetic workloads.
PlanetLab is a global platform for deploying and evaluating network
services [21,3]. In many ways,
it has been an unexpected success. It was launched in mid-2002 with
100 machines distributed to 40 sites, but today includes 700 nodes
spanning 336 sites and 35 countries. It currently hosts 2500
researchers affiliated with 600 projects. It has been used to evaluate
a diverse set of planetary-scale network services, including content
distribution [33,8,24],
anycast [35,9],
DHTs [26], robust
DNS [20,25], large-file
distribution [19,1], measurement
and analysis [30], anomaly and fault
diagnosis [36], and
event notification [23]. It supports the
design and evaluation of dozens of long-running services that
transport an aggregate of 3-4TB of data every day, satisfying tens of
millions of requests involving roughly one million unique clients and
servers.
To deliver this utility, PlanetLab innovates along two main dimensions:
- Novel management architecture. PlanetLab administers nodes
owned by hundreds of organizations, which agree to allow a
worldwide community of researchers--most complete strangers--to
access their machines. PlanetLab must manage a complex relationship
between node owners and users.
- Novel usage model. Each PlanetLab node should gracefully
degrade in performance as the number of users grows. This gives the
PlanetLab community an incentive to work together to make best use
of its shared resources.
In both cases, the contribution is not a new mechanism or
algorithm, but rather a synthesis (and full exploitation) of carefully
selected ideas to produce a fundamentally new system.
Moreover, the process by which we designed the system is interesting
in its own right:
- Experience-driven design. PlanetLab's design evolved
incrementally based on experience gained from supporting a live user
community. This is in contrast to most research systems that are
designed and evaluated under controlled conditions, contained within a
single organization, and evaluated using synthetic workloads.
- Conflict-driven design. The design decisions that shaped
PlanetLab were responses to conflicting requirements. The result is a
comprehensive architecture based more on balancing global
considerations than improving performance along a single dimension,
and on real-world requirements that do not always lend themselves to
quantifiable metrics.
One could view this as a new model of system design, but
of course it isn't [6,27].
This paper identifies the requirements that shaped the system,
explains the design decisions that resulted from resolving conflicts
among these requirements, and reports our experience building and
supporting the system. A side-effect of the discussion is a fairly
complete overview of PlanetLab's current architecture, but the primary
goal is to describe the design decisions that went into building
PlanetLab, and to report the lessons we have learned in the process.
For a comprehensive definition of the PlanetLab
architecture, the reader is referred to [22].
2 Background
This section identifies the requirements we understood at the time
PlanetLab was first conceived, and sketches the high-level design
proposed at that time. The discussion includes a summary of the three
main challenges we have faced, all of which can be traced to tensions
between the requirements. The section concludes by looking at the
relationship between PlanetLab and similar systems.
2.1 Requirements
PlanetLab's design was guided by five major requirements that
correspond to objectives we hoped to achieve as well as constraints
we had to live with.
Although we recognized all of these
requirements up-front, the following discussion articulates them with
the benefit of hindsight.
(R1) It must provide a global platform that supports both
short-term experiments and long-running services. Unlike previous
testbeds, a revolutionary goal of PlanetLab was that it support
experimental services that could run continuously and support a real
client workload. This implied that multiple services be able to run
concurrently since a batch-scheduled facility is not conducive to a
24 7 workload. Moreover, these services (experiments) should
be isolated from each other so that one service does not unduly
interfere with another. 7 workload. Moreover, these services (experiments) should
be isolated from each other so that one service does not unduly
interfere with another.
(R2) It must be available immediately, even though no one knows
for sure what ``it'' is. PlanetLab faced a dilemma: it was designed
to support research in broad-coverage network services, yet its
management (control) plane is itself such a service. It
was necessary to deploy PlanetLab and start gaining experience with
network services before we fully understood what services would be
needed to manage it. As a consequence, PlanetLab had to be
designed with explicit support for evolution. Moreover, to get people
to use PlanetLab--so we could learn from it--it had to be
as familiar as possible; researchers are not likely to change
their programming environment to use a new facility.
(R3) We must convince sites to host nodes running code written by
unknown researchers from other organizations. PlanetLab takes
advantage of nodes contributed by research organizations around the
world. These nodes, in turn, host services on behalf of users from
other research organizations. The individual users are unknown
to the node owners, and to make matters worse, the services they
deploy often send potentially disruptive packets into the Internet.
That sites own and host nodes, but trust PlanetLab to administer them,
is unprecedented at the scale PlanetLab operates. As a consequence, we
must correctly manage the trust relationships so that
the risks to each site are less than the benefits they derive.
(R4) Sustaining growth depends on support for autonomy and
decentralized control. PlanetLab is a world-wide platform constructed
from components owned by many autonomous organizations. Each
organization must retain some amount of control over how their
resources are used, and PlanetLab as a whole must give geographic
regions and other communities as much autonomy as possible in defining
and managing the system. Generally, sustaining such a system requires
minimizing centralized control.
(R5) It must scale to support many users with minimal resources.
While a commercial variant of PlanetLab might have cost recovery
mechanisms to provide resource guarantees to each of its users,
PlanetLab must operate in an under-provisioned environment. This means
conservative allocation strategies are not practical, and it is
necessary to promote efficient resource sharing. This includes both
physical resources (e.g., cycles, bandwidth, and memory) and logical
resources (e.g., IP addresses).
Note that while the rest of this paper discusses the many tensions
between these requirements, two of them are quite synergistic. The
requirement that we evolve PlanetLab (R2) and the need for
decentralized control (R4) both point to the value of factoring
PlanetLab's management architecture into a set of building block
components with well-defined interfaces. A major challenge of building
PlanetLab was to understand exactly what these pieces should be.
To this end, PlanetLab originally adopted an organizing principle
called unbundled management, which argued that the services used
to manage PlanetLab should themselves be deployed like any other
service, rather than bundled with the core system. The case for
unbundled management has three arguments: (1) to allow the system to
more easily evolve; (2) to permit third-party developers to build
alternative services, enabling a software bazaar, rather than rely on
a single development team with limited resources and creativity; and
(3) to permit decentralized control over PlanetLab resources, and
ultimately, over its evolution.
2.2 Initial Design
PlanetLab supports the required usage model through distributed
virtualization--each service runs in a slice of PlanetLab's
global resources. Multiple slices run concurrently on PlanetLab, where
slices act as network-wide containers that isolate services from each
other. Slices were expected to enforce two kinds of isolation: resource isolation and security isolation, the former concerned
with minimizing performance interference and the latter concerned with
eliminating namespace interference.
At a high-level, PlanetLab consists of a centralized front-end, called
PlanetLab Central (PLC), that remotely manages a set of nodes. Each
node runs a node manager (NM) that establishes and controls virtual machines (VM) on that node. We assume an underlying virtual machine monitor (VMM) implements the VMs. Users create slices
through operations available on PLC, which results in PLC contacting
the NM on each node to create a local VM. A set of such VMs defines
the slice.
We initially elected to use a Linux-based VMM due to Linux's high
mind-share [3]. Linux is augmented with
Vservers [16] to provide security isolation and a set of
schedulers to provide resource isolation.
2.3 Design Challenges
Like many real systems, what makes PlanetLab interesting to
study--and challenging to build--is how it deals with the
constraints of reality and conflicts among
requirements. Here, we summarize the three main challenges;
subsequent sections address each in more detail.
First, unbundled management is a powerful design principle for
evolving a system, but we did not fully understand
what it entailed nor how it would be shaped by other aspects of
the system. Defining PlanetLab's management architecture--and in
particular, deciding how to factor management functionality into a set
of independent pieces--involved resolving three main conflicts:
- minimizing centralized components (R4) yet maintaining the
necessary trust assumptions (R3);
- balancing the need for slices to acquire the resources they need
(R1) yet coping with scarce resources (R5);
- isolating slices from each other (R1) yet allowing some slices
to manage other slices (R2).
Section 3 discusses our experiences evolving
PlanetLab's management architecture.
Second, resource allocation is a significant challenge for any system,
and this is especially true for PlanetLab, where the requirement for
isolation (R1) is in conflict with the reality of limited resources
(R5). Part of our approach to this situation is embodied in the
management structure described in Section 3, but it is
also addressed in how scheduling and allocation decisions are made on
a per-node basis. Section 4 reports our experience
balancing isolation against efficient resource usage.
Third, we must maintain a stable system
on behalf of the user community (R1) and yet evolve the platform to
provide long-term viability and sustainability (R2).
Section 5 reports our operational experiences with
PlanetLab, and the lessons we have learned as a result.
An important question to ask about PlanetLab is whether its specific
design requirements make it unique, or if our experiences can apply to
other systems. Our response is that PlanetLab
shares ``points of pain'' with three similar systems--ISPs, hosting
centers, and the GRID--but pushes the envelope relative to each.
First, PlanetLab is like an ISP in that it has many points-of-presence
and carries traffic to/from the rest of the Internet. Like ISPs (but
unlike hosting centers and the GRID), PlanetLab has to provide
mechanisms that can by used to identify and stop disruptive traffic.
PlanetLab goes beyond traditional ISPs, however, in that it has to
deal with arbitrary (and experimental) network services, not just
packet forwarding.
Second, PlanetLab is like a hosting center in that its nodes support
multiple VMs, each on behalf of a different user. Like a hosting
center (but unlike the GRID or ISPs), PlanetLab has to provide
mechanisms that enforce isolation between VMs. PlanetLab goes beyond
hosting centers, however, because it includes third-party services
that manage other VMs, and because it must scale to large numbers of
VMs with limited resources.
Third, PlanetLab is like the GRID in that its resources are owned by
multiple autonomous organizations. Like the GRID (but unlike an ISP or
hosting center), PlanetLab has to provide mechanisms that allow one
organization to grant users at another organization the right to use
its resources. PlanetLab goes far beyond the GRID, however, in that it
scales to hundreds of ``peering'' organizations by avoiding pair-wise
agreements.
PlanetLab faces new and unique problems because it is at
the intersection of these three domains. For example, combining
multiple independent VMs with a single IP address (hosting center)
and the need to trace disruptive traffic back to the originating user
(ISP) results in a challenging problem. PlanetLab's
experiences will be valuable to other systems that may emerge where
any of these domains intersect, and may in time influence the
direction of hosting centers, ISPs, and the GRID as well.
3 Slice Management
This section describes the slice management architecture that evolved
over the past four years. While the discussion includes some details,
it primarily focuses on the design decisions and the factors that
influenced them.
3.1 Trust Assumptions
Given that PlanetLab sites and users span multiple organizations (R3),
the first design issue was to define the underlying trust model.
Addressing this issue required that we identify the key principals,
explicitly state the trust assumptions among them, and provide
mechanisms that are consistent with this trust model.
Over 300 autonomous organizations have contributed nodes to PlanetLab
(they each require control over the nodes they own) and over 300
research groups want to deploy their services across PlanetLab (the
node owners need assurances that these services will not be disruptive).
Clearly, establishing 300300 pairwise trust relationships is
an unmanageable task, but it is well-understood that a trusted
intermediary is an effective way to manage such an NN problem.
PLC is one such trusted intermediary: node owners trust PLC to manage
the behavior of VMs that run on their nodes while preserving their
autonomy, and researchers trust PLC to provide access to a set of
nodes that are capable of hosting their services.
Recognizing this role for PLC, and organizing the
architecture around it, is the single most important aspect of the
design beyond the simple model presented in Section 2.2.
With this backdrop, the PlanetLab architecture recognizes three main
principals:
- PLC is a trusted intermediary that manages nodes on behalf a set
of owners, and creates slices on those nodes on behalf of a set of
users.
- An owner is an organization that hosts (owns)
PlanetLab nodes. Each owner retains ultimate control over their own
nodes, but delegates management of those nodes to the
trusted PLC intermediary. PLC provides mechanisms that allow owners
to define resource allocation policies on their nodes.
- A user is a researcher that deploys a service on a set of
PlanetLab nodes. PlanetLab users are currently individuals
at research organizations (e.g., universities, non-profits,
and corporate research labs), but this is not an architectural
requirement. Users create slices on PlanetLab nodes via mechanisms
provided by the trusted PLC intermediary.
Figure 1:
Trust relationships among principals.
 |
Figure 1 illustrates the trust relationships between
node owners, users, and the PLC intermediary. In this figure:
- PLC expresses trust in a user by issuing it credentials that let
it access slices. This means that the user must adequately convince
PLC of its identity (e.g., affiliation with some organization or group).
- A user trusts PLC to act as its agent, creating slices on its behalf
and checking credentials so that only that user can install and modify
the software running in its slice.
- An owner trusts PLC to install software that is able to map
network activity to the responsible slice. This software must also
isolate resource usage of slices and bound/limit slice behavior.
- PLC trusts owners to keep their nodes physically secure. It is
in the best interest of owners to not circumvent PLC (upon which it
depends for accurate policing of its nodes). PLC must also verify
that every node it manages actually belongs to an owner with which
it has an agreement.
Given this model, the security architecture includes the following
mechanisms. First, each node boots from an immutable file system,
loading (1) a boot manager program, (2) a public key for PLC,
and (3) a node-specific secret key. We assume that the node is
physically secured by the owner in order to keep the key secret,
although a hardware mechanism such as TCPA could also be leveraged.
The node then contacts a boot server running at PLC, authenticates the
server using the public key, and uses HMAC and the secret key to
authenticate itself to PLC. Once authenticated, the boot server
ensures that the appropriate VMM and the NM are installed on the node,
thus satisfying the fourth trust relationship.
Second, once PLC has vetted an organization through an
off-line process, users at the site are allowed to create accounts and
upload their private keys. PLC then installs
these keys in any VMs (slices) created on behalf of those users, and
permits access to those VMs via ssh. Currently, PLC requires
that new user accounts are
authorized by a principal investigator associated with each
site--this provides some degree of assurance
that accounts are only created by legitimate users with a connection
to a particular site, thus satisfying the first trust relationship.
Third, PLC runs an auditing service that records information about all
packet flows coming out of the node. The auditing service offers a
public, web-based interface on each node, through which anyone that
has received unwanted network traffic from the node can determine the
responsible users. PLC archives this auditing information by
periodically downloading the audit log.
Given the requirement that PlanetLab support long-lived slices (R1)
and accommodate scarce resources (R5), the second design decision was
to decouple slice creation from resource allocation. In
contrast to a hosting center that might create a VM and assign it a
fixed set of resources as part of an SLA, PlanetLab creates new VMs
without regard for available resources--each such VM is given a fair
share of the available resources on that node whenever it runs--and
then expects slices to engage one or more brokerage services to
acquire resources.
To this end, the NM supports two abstract objects: virtual
machines and resource pools. The former is a container that
provides a point-of-presence on a node for a slice. The latter is a
collection of physical and logical resources that can be bound to a
VM. The NM supports operations to create both objects, and to bind a
pool to a VM for some fixed period of time. Both types of objects are
specified by a resource specification (rspec), which is a
list of attributes that describe the object. A VM can run as soon as
it is created, and by default is given a fair share of the node's
unreserved capacity. When a resource pool is bound to a VM, that VM is
allocated the corresponding resources for the duration of the binding.
Global management services use these per-node operations to create
PlanetLab-wide slices and assign resources to them. Two such service
types exist today: slice creation services and brokerage
services. These services can be separate or combined into a single
service that both creates and provisions slices. At the same time,
different implementations of brokerage services are possible (e.g.,
market-based services that provide mechanisms for buying and selling
resources [10,14], and batch scheduling
services that simply enforce admission control for use of a finite
resource pool [7]).
As part of the resource allocation architecture, it was also necessary
to define a policy that governs how resources are allocated. On this
point, owner autonomy (R4) comes into play: only owners are allowed to
invoke the ``create resource pool'' operation on the NM that runs on
their nodes. This effectively defines the one or more ``root'' pools,
which can subsequently be split into sub-pools and reassigned. An
owner can also directly allocate a certain fraction of its node's
resources to the VM of a specific slice, thereby explicitly supporting
any services the owner wishes to host.
PlanetLab's management architecture was expected to evolve through the
introduction of third-party services (R2). We viewed the NM interface
as the key feature, since it would support the many third-party
creation and brokerage services that would emerge. We regarded PLC as
merely a ``bootstrap'' mechanism that could be used to deploy such new
global management services, and thus, we expected PLC to play a
reduced role over time.
However, experience showed this approach to be flawed. This is for two
reasons, one fundamental and one pragmatic. First, it failed to
account for PLC's central role in the trust model of
Section 3.1. Maintaining trust relationships among
participants is a critical role played by PLC, and one not easily
passed along to other services. Second, researchers building new
management services on PlanetLab were not interested in replicating
all of PLCs functionality. Instead of using PLC to bootstrap a
comprehensive suite of management services, researchers wanted to
leverage some aspects of PLC and replace others.
To accommodate this situation, PLC is today structured as follows.
First, each owner implicitly assigns all of its resources to PLC for
redistribution. The owner can override this allocation by granting a
set of resources to a specific slice, or divide resources among
multiple brokerage services, but by default all resources are
allocated to PLC.
Second, PLC runs a slice creation service--called pl_conf--on
each node. This service runs in a standard VM and invokes the NM
interface without any additional privilege. It also exports an XML-RPC
interface by which anyone can invoke its services. This is important
because it means other brokerage and slice creation services can use
pl_conf as their point-of-presence on each node rather than
have to first deploy their own slice. Originally, the PLC/pl_conf interface was private as we expected management services to
interact directly with the node manager. However, making this a
well-defined, public interface has been a key to
supporting delegation.
Third, PLC provides a front-end--available either as a GUI or as a
programmatic interface at www.planet-lab.org--through which
users create slices. The PLC front-end interacts with pl_conf
on each node with the same XML-RPC interface that other services use.
Finally, PLC supports two methods by which slices are actually
instantiated on a set of nodes: direct and delegated.
Using the direct method, the PLC front-end contacts pl_conf on
each node to create the corresponding VM and assign resources to
it. Using delegation, a slice creation service running on behalf of a user
contacts PLC for a ticket that encapsulates the right to create
a VM or redistribute a pool of resources. A ticket is a signed rspec; in this case, it is signed by PLC. The agent then contacts
pl_conf on each node to redeem this ticket, at which time pl_conf validates it and calls the NM to create a VM
or bind a pool of resources to an existing VM.
The mechanisms just described currently support two slice creation
services (PLC and Emulab [34], the latter uses tickets
granted by the former), and two brokerage services
(Sirius [7] and Bellagio [2], the first of which
is granted capacity as part of a root resource allocation decision).
Note that the delegated method of slice creation is push-based, while
the direct method is pull-based. With delegation, a slice creation
service contacts PLC to retrieve a ticket granting it the right to
create a slice, and then performs an XML-RPC call to pl_conf on each
node. For a slice spanning a significant fraction of PlanetLab's
nodes, an implementation would likely launch multiple such calls in
parallel. In contrast, PLC uses a polling approach: each pl_conf contacts PLC periodically to retrieve a set of tickets for
the slices it should run.
While the push-based approach can create a slice in less time, the
advantage of pull-based approach is that it enables slices to persist
across node reinstalls. Nodes cannot be trusted to have persistent
state since they are completely reinstalled from time to time due to
unrecoverable errors such as corrupt local file systems. The
pull-based strategy views all nodes as maintaining only soft state,
and gets the definitive list of slices for that node from PLC.
Therefore, if a node is reinstalled, all of its slices are
automatically recreated. Delegation makes it possible for others to
develop alternative slice creation semantics--for example, a ``best
effort'' system that ignores such problems--but PLC takes the
conservative approach because it is used to create slices for
essential management services.
Given our desire to minimize the centralized elements of PlanetLab
(R4), our next design decision was to make it possible for multiple
independent PlanetLab-like systems to co-exist and federate with each
other. Note that this issue is distinct from delegation, which allows
multiple management services to co-exist withing a single PlanetLab.
There are three keys to enabling federation. First, there must be
well-defined interfaces by which independent instances of PLC invoke
operations on each other. To this end, we observe that our
implementation of PLC naturally divides into two halves: one that
creates slices on behalf of users and one that manages nodes on behalf
of owners, and we say that PLC embodies a slice authority and a
management authority, respectively. Corresponding to these two
roles, PLC supports two distinct interfaces: one that is used to
create and control slices, and one that is used to boot and manage
nodes. We claim that these interfaces are minimal, and hence, define
the ``narrow waist'' of the PlanetLab hourglass.
Second, supporting multiple independent PLCs implies the need to name
each instance. It is PLC in its slice authority role that names
slices, and its name space must be extended to also name slice
authorities. For example, the slice cornell.cobweb is implicitly
plc.cornell.cobweb, where plc is the top-level slice
authority that approved the slice. (As we generalize the slice name
space, we adopt ``.'' instead of ``_'' as the delimiter.) Note that
this model enables a hierarchy of slice authorities, which is in fact
already the case with plc.cornell, since PLC trusts Cornell to
approve local slices (and the users bound to them).
This generalization of the slice naming scheme leads to several
possibilities:
- PLC delegates the ability to create slices to regional slice
authorities (e.g., plc.japan.utokyo.ubiq);
- organizations create ``private'' PlanetLab's (e.g., epfl.chawla) that possibly peer with each other, or with the
``public'' PlanetLab; and
- alternative ``root'' naming authorities come into existence,
such as one that is
responsible for commercial (for-profit) slices (e.g., com.startup.voip).
The third of these is speculative, but the first two
scenarios have already happened or are in progress, with five private
PlanetLabs running today and two regional slice authorities planned
for the near future. Note that there must be a single global naming
authority that ensures all top-level slice authority names are
unique. Today, PLC plays that role.
The third key to federation is to design pl_conf so that it is
able to create slices on behalf of many different slice authorities.
Node owners allocate resources to the slice authorities they want to
support, and configure pl_conf to accept tickets signed by
slice authorities that they trust. Note that being part of the
``public'' PlanetLab carries the stipulation that a certain minimal
amount of capacity be set aside for slices created by the PLC slice
authority, but owners can reserve additional capacity for other slice
authorities and for individual slices.
3.5 Least Privilege
Table 1:
Source lines of code for various management services
| Service |
Lines of Code |
Language |
|---|
| Node Manager |
2027 |
Python |
| Proper |
5752 |
C |
| pl_conf |
1975 |
Python |
| Sirius |
850 |
Python |
| Stork |
12803 |
Python |
| CoStat + CoMon |
1155 |
C |
| PlanetFlow |
5932 |
C |
|
We conclude our description of PlanetLab's management architecture by
focusing on the node-centric issue of how management functionality has
been factored into self-contained services, moved out of the NM and
isolated in their own VMs, and granted minimal privileges.
When PlanetLab was first deployed, all management services requiring
special privilege ran in a single root VM as part of a monolithic node
manager. Over time, stand-alone services have been carved off of the
NM and placed in their own VMs, multiple versions of some services
have come and gone, and new services have emerged. Today, there are
five broad classes of management services. The following summarizes
one particular ``suite'' of services that a user might engage; we also
identify alternative services that are available.
- Slice Creation Service:
- pl_conf is the default slice
creation service. It requires no special privilege: the node owner
creates a resource pool and assigns it to pl_conf when the node
boots. Emulab [34] offers an alternative slice creation
service that uses
tickets granted by PLC and redeemed by pl_conf.
- Brokerage Service:
- Sirius [7] is the most widely used
brokerage service. It performs admission control on a resource pool
set aside for one-hour experiments. Sirius requires no special
privilege: pl_conf allocates a sub-pool of resources to
Sirius. Bellagio [2] and Tycoon [14] are
alternative market-based brokerage
services that are initialized in the same way.
- Monitoring Service:
- CoStat is a low-level instrumentation
program that gathers data about the state of the local node. It is
granted the ability to read /proc files that report data
about the underlying VMM, as well as the right to execute scripts
(e.g., ps and top) in the root context. Multiple
additional services--e.g., CoMon [31], PsEPR [5],
SWORD [18]--then
collect and process this
information on behalf of users. These services require no additional
privilege.
- Environment Service:
- Stork [12] deploys, updates, and
configures services and experiments. Stork is granted the right to
mount the file system of a client slice, which Stork then uses to
install software packages required by the slice. It is also granted
the right to mark a file as immutable, so that it can safely be shared
among slices without any slice being able to modify the
file. Emulab
and AppManager [28] provide alternative environment
services without
extra privilege; they simply provide tools for uploading software
packages.
- Auditing Service:
- PlanetFlow [11] is an auditing
service that logs
information about packet flows, and is able to map externally visible
network activity to the responsible slice. PlanetFlow is granted the
right to run ulogd in the root context to retrieve log
information from the VMM.
The need to grant narrowly-defined privileges to certain management
services has led us to define a mechanism called Proper (PRivileged
OPERation) [17]. Proper uses an ACL to specify the particular
operations that can be performed by a VM that hosts a management
service, possibly including argument constraints for each operation.
For example, the CoStat monitoring service gathers various statistics
by reading /proc files in the root context, so Proper
constrains the set of files that can be opened by CoStat to only the
necessary directories. For operations that affect other slices
directly, such as mounting the slice's file system or executing a
process in that slice, Proper also allows the target slice to place
additional constraints on the operations that can be performed
e.g., only a particular directory may be mounted by Stork. In this
way we are able to operate each management service with a small set of
additional privileges above a normal slice, rather than giving out
coarse-grained capabilities such as those provided by the standard
Linux kernel, or co-locating the service in the root context.
Finally, Table 1 quantifies the impact of moving
functionality out of the NM in terms of lines-of-code. The LOC data is
generated using David A. Wheeler's 'SLOCCount'. Note that we show
separate data for Proper and the rest of the node manager; Proper's
size is in part a function of its implementation in C.
One could argue that these numbers are conservative, as there are
additional services that this list of management services employ. For
example, CoBlitz is a large file transfer mechanism that is used by
Stork and Emulab to disseminate large files across a set of nodes.
Similarly, a number of these services provide a web interface that
must run on each node, which would greatly increase the size of the
TCB if the web server itself had to be included in the root context.
4 Resource Allocation
One of the most significant challenges for PlanetLab has been to
maximize the platform's utility for a large user community while
struggling with the reality of limited resources. This challenge has
led us to a model of weak resource isolation between slices. We
implement this model through fair sharing of CPU and network
bandwidth, simple mechanisms to avoid the worst kinds of interference
on other resources like memory and disk, and tools to give users
information about resource availability on specific nodes. This
section reports our experiences with this model in practice, and
describes some of the techniques we've adopted to make the system as
effective and stable as possible.
PlanetLab supports a workload mixing one-off
experiments with long-running services. A complete
characterization of this workload is beyond the scope of this
paper, but we highlight some important aspects below.
Figure 2:
Active and live slices on PlanetLab
![\begin{figure}\centering
\subfigure[Active slices, by quartile] {
\epsfig{file=...
... \epsfig{file=Fig/liveslices.eps, width=\linewidth, height=1.5in}
}
\end{figure}](img3.png) |
CoMon--one of the performance-monitoring services running on
PlanetLab--classifies a slice as active on a node if it
contains a process, and live if, in the last five minutes, it
used at least  % (300ms) of the CPU. Figure 2
shows, by quartile, the number of active and live slices across
PlanetLab during the past year. Each graph shows five lines; 25% of
PlanetLab nodes have values that fall between the first and second
lines, 25% between the second and third, and so on. % (300ms) of the CPU. Figure 2
shows, by quartile, the number of active and live slices across
PlanetLab during the past year. Each graph shows five lines; 25% of
PlanetLab nodes have values that fall between the first and second
lines, 25% between the second and third, and so on.
Looking at each graph in more detail, Figure 2(a)
illustrates that the number of active slices on most PlanetLab nodes
has grown steadily. The median active slice count has increased from
40 slices in March 2005 to the mid-50s in April 2006, and the maximum
number of active slices has increased from 60 to 90. PlanetLab nodes
can support large numbers of mostly idle slices because each VM is
very lightweight. Additionally, the data shows that 75% of PlanetLab
nodes have consistently had at least 40 active slices during the past
year.
Figure 2(b) shows the distribution of live slices.
Note that at least 50% of PlanetLab nodes
consistently have a live slice count within two of the median.
Additional data indicates that this is a result of three factors.
First, some monitoring slices (like CoMon and PlanetFlow) are live
everywhere, and so create a lower bound on the number of live slices.
Second, most researchers do not appear to greedily use more nodes than
they need; for example, only 10% of slices are deployed on all nodes,
and 60% are deployed on less than 50 nodes. We presume researchers
are self-organizing their services and experiments onto disjoint sets
of nodes so as to distribute load, although there are a small number
of popular nodes that support over 25 live slices. Third, the slices
that are deployed on all nodes are not live on all of them at
once. For instance, in April 2006 we observed that CoDeeN was active
on 436 nodes but live on only 269. Robust (and adaptive) long-running
services are architected to dynamically balance load to less utilized
nodes [33,26].
Of course we did not know what PlanetLab's workload would look like
when we made many early design decisions. As reported in
Section 2.2, one such decision was to use Linux+Vservers
as the VMM, primarily because of the maturity of the technology.
Since this time, alternatives like Xen have advanced considerably, but
we have not felt compelled to reconsider this decision. A key reason
is that PlanetLab nodes run up to 25 live VMs, and up to 90 active
VMs, at at time. This is possible because we could build a system
that supports resource overbooking and graceful degradation on a
framework of Vserver-based VMs. In contrast, Xen allocates specific
amounts of resources, such as physical memory and disk, to each
VM. For example, on a typical PlanetLab node with 1GB memory, Xen can
support only 10 VMs with 100MB memory each, or 16 with 64MB memory.
Therefore, it's not clear how a PlanetLab based on Xen could support
our current user base. Note that the management architecture
presented in the previous section is general enough to support
multiple VM types (and a Xen prototype is running in the lab), but
resource constraints make it likely that most PlanetLab slices will
continue to use Vservers for the foreseeable future.
4.2 Graceful Degradation
PlanetLab's usage model is to allow as many users on a node as want to
use it, enable resource brokers that are able to secure guaranteed
resources, and gracefully degrade the node's performance as resources
become over utilized. This section describes the mechanisms that
support such behavior and evaluates how well they work.
The earliest version of PlanetLab used the standard Linux CPU
scheduler, which provided no CPU isolation between slices: a slice
with 400 Java threads would get 400 times the CPU of a slice with one
thread. This situation occasionally led to collapse of the system and
revealed the need for a slice-aware CPU scheduler.
Fair share scheduling [32] does not collapse
under load, but rather
supports graceful degradation by giving each scheduling container
proportionally fewer cycles. Since mid-2004, PlanetLab's CPU
scheduler has performed fair sharing among slices. During that time,
however, PlanetLab has run three distinct CPU schedulers: v2 used the
SILK scheduler [3], v3.0 introduced CKRM (a
community project in its early stages), and v3.2 (the current version)
uses a modification of Vserver's CPU rate limiter to implement fair
sharing and reservations. The question arises, why so many CPU
schedulers?
The answer is that, for the most part, we switched CPU schedulers for
reasons other than scheduling behavior. We switched from SILK to CKRM
to leverage a community effort and reduce our code maintenance burden.
However, at the time we adopted it, CKRM was far from production
quality and the stability of PlanetLab suffered as a result. We then
dropped CKRM and wrote another CPU scheduler, this time based on small
modifications to the Vservers code that we had already incorporated
into the PlanetLab kernel. This CPU scheduler gave us the capability
to provide slices with CPU reservations as well as shares, which we
lacked with SILK and CKRM. Perhaps more importantly, the scheduler
was more robust, so PlanetLab's stability dramatically improved, as
shown in Section 5. We are solving the code maintenance
problem by working with the Vservers developers to incorporate our
modifications into their main distribution.
The current (v3.2) CPU scheduler implements fair sharing and
work-conserving CPU reservations by overlaying a token bucket filter
on top of the standard Linux CPU scheduler. Each slice has a token
bucket that accumulates tokens at a specified rate; every
millisecond, the slice that owns the running process is charged one
token. A slice that runs out of tokens has its processes removed from
the runqueue until its bucket accumulates a minimum amount of tokens.
This filter was already present in Vservers, which used it to
put an upper bound on the amount of CPU that any one VM could receive;
we simply modified it to provide a richer set of behaviors.
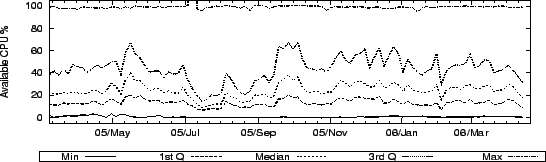
Figure 3:
CPU % Available on PlanetLab
 |
The rate that tokens accumulate depends on whether the slice has a
reservation or a share. A slice with a reservation
accumulates tokens at its reserved rate: for example, a slice with a
10% reservation gets 100 tokens per second, since a token entitles it
to run a process for one millisecond. The default share is actually
a small reservation, providing the slice with 32 tokens every
second, or 3% of the total capacity.
The main difference between reservations and shares occurs
when there are runnable processes but no slice has enough tokens to
run: in this case, slices with shares are given priority over slices
with reservations. First, if there is a runnable slice
with shares, tokens are given out fairly to all slices with shares
(i.e., in proportion to the number of shares each slice has) until one
can run. If there are no runnable slices with shares, then tokens are
given out fairly to slices with reservations. The end result is that
the CPU capacity is effectively partitioned between the two classes of
slices: slices with reservations get what they've reserved, and slices
with shares split the unreserved capacity of the machine proportionally.
CoMon indicates that the average PlanetLab node has its CPU usage
pegged at 100% all the time. However, fair sharing means that an
individual slice can still obtain a significant percentage of the CPU.
Figure 3 shows, by quartile, the CPU availability
across PlanetLab, obtained by periodically running a spinloop in the
CoMon slice and observing how much CPU it receives. The data shows
large amounts of CPU available on PlanetLab: at least 10% of the CPU is
available on 75% of nodes, at least 20% CPU on 50% of nodes, and at
least 40% CPU on 25% of nodes.
4.2.2 Memory
Memory is a particularly scarce resource on PlanetLab, and we were
faced with with chosing between four designs. One is the default Linux
behavior, which either kernel panics or randomly kills a process when
memory becomes scarce. This clearly does not result in graceful
degradation. A second is to statically allocate a fixed amount of
memory to each slice. Given that there are up to 90 active VMs on a
node, this would imply an impractically small 10MB allocation for
each VM on the typical node with 1GB of memory. A third option is to
explicitly allocate
memory to live VMs, and reclaim memory from inactive VMs. This implies
the need for a control mechanism, but globally synchronizing such a
mechanism across PlanetLab (i.e., to suspend a slice) is problematic
at fine-grained time scales. The fourth option is to dynamically
allocate memory to VMs on demand, and react in a more predictable way
when memory is scarce.
We elected the fourth option, implementing a simple watchdog daemon,
called pl_mom, that resets the slice consuming the most
physical memory when swap has almost filled. This penalizes the
memory hog while keeping the system running for everyone else.
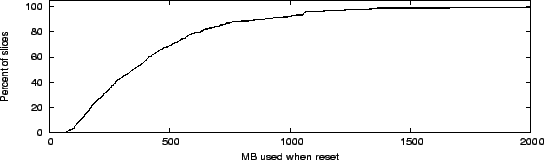
Figure 4:
CDF of memory consumed when slice reset
 |
Although pl_mom was noticably active when first deployed--as
users learned to not keep log files in memory and to avoid default
heap sizes--it now typically resets an average of 3-4 VMs per day,
with higher rates during heavy usage (e.g., major conference
deadlines). For example, 200 VMs were reset during the two week
run-up to the OSDI deadline. We note, however, that roughly one-third
of these resets were on under-provisioned nodes (i.e., nodes with less
than 1GB of memory).
Figure 4 shows the cumulative distribution function of
how much physical memory individual VMs were consuming when they were
reset between November 2004 and April
2006. We note that about 10% of the resets (corresponding
largely to the first 10% of the distribution) occurred on nodes with
less than 1GB memory, where memory pressure was tighter. Over 80% of
all resets had been allocated at least 128MB. Half of all resets
occurred when the slice was using more than 400MB of memory, which
on a shared platform like PlanetLab indicates either a memory leak or
poor experiment design (e.g., a large in-memory logfile).
Figure 5:
Memory availability on PlanetLab
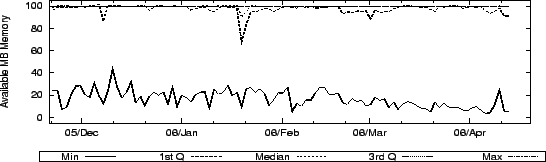 |
Figure 5 shows CoMon's estimate of how many MB of
memory are available on each PlanetLab node. CoMon estimates
available memory by allocating 100MB, touching random pages
periodically, and then observing the size of the in-memory working set
over time. This serves as a gauge of memory pressure, since if
physical memory is exhausted and another slice allocates memory, these
pages would be swapped out. The CoMon data shows that a slice can
keep a 100MB working set in memory on at least 75% of the nodes
(since only the minimum and first quartile line are really visible).
So it appears that, in general, there is not as much memory pressure
on PlanetLab as we expected. This also reinforces our intuition that
pl_mom resets slices mainly on nodes with too little memory or
when the slice's application has a memory leak.
Hosting sites can cap the maximum rate at which the local PlanetLab
nodes can send data. PlanetLab fairly shares the bandwidth under the
cap among slices, using Linux's Hierarchical Token Bucket traffic
filter [15]. The node bandwidth cap allows sites to
limit the peak rate at which nodes send data so that PlanetLab
slices cannot completely saturate the site's outgoing links.
The sustained rate of each slice is limited by the pl_mom
watchdog daemon. The daemon allows each slice to send a quota of
bytes each day at the node's cap rate, and if the slice exceeds its
quota, it imposes a much smaller cap for
the rest of the day. For example, if the slice's quota is 16GB/day,
then this corresponds to a sustained rate of 1.5Mbps; once the slice
sends more than 16GB, it is capped at 1.5Mbps until midnight GMT. The
goal is to allow most slices to burst data at the node's cap rate, but
prevents slices that are sending large amounts of data from badly
abusing the site's local resources.
There are two weaknesses of PlanetLab's bandwidth capping approach.
First, some sites pay for bandwidth based on the total amount of
traffic they generate per month, and so they need to control the
node's sustained bandwidth rather than the peak. As mentioned, pl_mom limits sustained bandwidth, but it operates on a per-slice
(rather than per-node) basis and cannot currently be controlled by the
sites. Second, PlanetLab does not currently cap incoming
bandwidth. Therefore, PlanetLab nodes can still saturate a bottleneck
link by downloading large amounts of data. We are currently
investigating ways to fix both of these limitations.
Figure 6:
Sustained network rates on PlanetLab
![\begin{figure}\centering
\subfigure[Transmit bandwidth in Kb/s, by quartile] {
...
...le] {
\epsfig{file=Fig/bwin.eps, width=\linewidth, height=1.5in}
}
\end{figure}](img8.png) |
Figure 6 shows, by quartile, the sustained rates at which
traffic is sent and received on PlanetLab nodes since January 2006.
These are calculated as the sums of the average transmit and receive
rates for all the slices of the machine over the last 15 minutes.
Note that the  axis is logarithmic, and the Minimum line is omitted
from the graph. The typical PlanetLab node
transmits about 1Mb/s and receives 500Kb/s, corresponding to about
10.8GB/day sent and 5.4GB/day received. These numbers are well below
the typical node bandwidth cap of 10Mb/s. On the other hand, some
PlanetLab nodes do actually have sustained rates of 10Mb/s both ways. axis is logarithmic, and the Minimum line is omitted
from the graph. The typical PlanetLab node
transmits about 1Mb/s and receives 500Kb/s, corresponding to about
10.8GB/day sent and 5.4GB/day received. These numbers are well below
the typical node bandwidth cap of 10Mb/s. On the other hand, some
PlanetLab nodes do actually have sustained rates of 10Mb/s both ways.
PlanetLab nodes do not provide permanent storage: data is not backed
up, and any node may be reinstalled without warning. Services adapt
to this environment by treating disk storage as a cache and storing
permanent data elsewhere, or else replicating data on multiple nodes.
Still, a PlanetLab node that runs out of disk space is essentially
useless. In our experience, disk space is usually exhausted by runaway
log files written by poorly-designed experiments. This problem was
mitigated, but not entirely solved, by the introduction of per-slice
disk quotas in June 2005. The default quota is 5GB, with larger
quotas granted on a case-by-case basis.
Figure 7:
Disk usage, by quartile, on PlanetLab
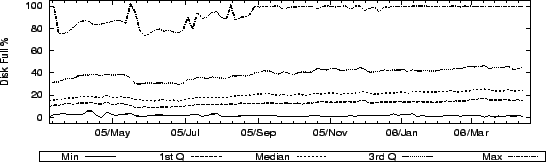 |
Figure 7 shows, by quartile, the disk utilization on
PlanetLab. The visible dip shortly after May 2005 is when quotas were
introduced. We note that, though disk utilization grows steadily over
time, 75% of Planetlab nodes still have at least 50% of the disks
free. Some PlanetLab nodes do occasionally experience full disks, but
most are old nodes that do not meet the current system requirements.
CPU scheduling latency can be a serious problem for some PlanetLab
applications. For example, in a packet forwarding overlay, the time
between when a packet arrives and when the packet forwarding process
runs will appear as added network latency to the overlay clients.
Likewise, many network measurement applications assume low scheduling
latency in order to produce precisely spaced packet trains. Many
measurement applications can cope with latency by knowing which
samples to trust and which must be discarded, as described
in [29]. Scheduling latency is more problematic
for routing overlays, which may have to drop incoming packets.
Figure 8:
RTT CDF on network, overlay with and without
SCHED_RR
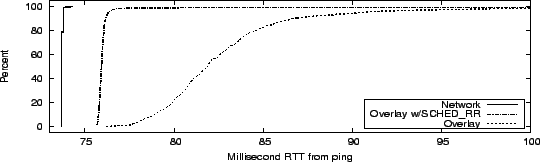 |
A simple experiment indicates how scheduling latency
can affect applications on PlanetLab. We deploy a packet forwarding
overlay, constructed using the Click modular software
router [13], on six Planetlab nodes co-located at Abilene
PoPs between Washington, D.C. and Seattle. Our experiment then uses
ping packets to compare the RTT between the Seattle and
D.C. nodes on the network and on the six-hop overlay. Each of the six
PlanetLab nodes running our overlay had load averages between 2 and 5,
and between 5 and 8 live slices, during the experiment. We observe
that the network RTT between the two nodes is a constant 74ms over
1000 pings, while the overlay RTT varies between 76ms and 135ms.
Figure 8 shows the CDF of RTTs for the network
(leftmost curve) and the overlay (rightmost curve). The overlay CDF
has a long tail that is chopped off at 100ms in the graph.
There are several reasons why the overlay
could have its CPU scheduling latency increased, including: (1) if
another task is running when a packet arrives, Click must wait to
forward the packet until the running task blocks or exhausts its
timeslice; (2) if Click is trying to use more than its ``fair share'',
or exceeds its CPU guarantee, then its token bucket CPU filter will
run out of tokens and it will be removed from the runqueue until it
acquires enough tokens to run; (3) even though the Click process may
be runnable, the Linux CPU scheduler may still decide to schedule a
different process; and (4) interrupts and other kernel activity may
preempt the Click process or otherwise prevent it from running.
We can attack the first three sources of latency using existing
scheduling mechanisms in PlanetLab. First, we give the overlay slice
a CPU reservation to ensure that it will never run out of tokens during
our experiment. Second, we use chrt to run the Click process on
each machine with the SCHED_RR scheduling policy, so that it will
immediately jump to the head of the runqueue and preempt any running
task. The Proper service described in Section 3.5 enables
our slice to run the
privileged chrt command on each PlanetLab node.
The middle curve in Figure 8 shows the results of
re-running our experiment with these new CPU scheduling parameters.
The overhead of the Click overlay, around 3ms, is clearly visible as
the difference between the two left-most curves. In the new
experiment, about 98% of overlay RTTs are within 3ms of the
underlying network RTT, and 99% are within 6ms. These CPU
scheduling mechanisms are employed by PL-VINI, the VINI (VIrtual
Network Infrastructure) prototype implemented on PlanetLab, to reduce
latency in an overlay network as an artifact of CPU scheduling
delay [4].
We note two things. First, the obstacle to making this solution
available on PlanetLab is primarily one of policy--choosing which
slices should get CPU reservations and bumps to the head of the
runqueue, since it is not possible to reduce everyone's latency on a
heavily loaded system. We plan to offer this option to short-term
experiments via the Sirius brokerage service, but long-running routing
overlays will need to be handled on a case-by-case basis. Second,
while our approach can provide low latency to the Click forwarder in
our experiment 99% of the time, it does not completely solve the
latency problem. We hypothesize that the remaining CPU scheduling
jitter is due to the fourth source of latency identified earlier,
i.e., kernel activity. If so, we may be able to
further reduce it by enabling kernel preemption, a feature already
available in the Linux 2.6 kernel.
Note that only limited conclusions can be drawn from the fact that
there is unused capacity available on PlanetLab nodes. Users are
adapting to the behavior of the system (including electing to not use
it) and they are writing services that adapt to the available
resources. It is impossible to know how many resources would have
been used, even by the same workload, had more been available.
However, the data does document that PlanetLab's fair share approach
is behaving as expected.
5 Operational Stability
The need to maintain a stable system, while at the same time evolving
it based on user experience, has been a major complication in
designing PlanetLab. This section outlines the general strategies we
adopted, and presents data that documents our successes and failures.
There is no easy way to continually evolve a system that is
experiencing heavy use. Upgrades are potentially disruptive for at
least two reasons: (1) new features introduce new bugs, and (2)
interface changes force users to upgrade their applications. To deal
with this situation, we adopted three general strategies.
First, we kept PlanetLab's control plane (i.e., the services outlined
in Section 3) orthogonal from the OS. This meant that
nearly all of the interface changes to the system affected only those
slices running management services; the vast majority of users were
able to program to a relatively stable Linux API. In retrospect this
is an obvious design principle, but when the project began, we
believed our main task was to define a new OS interface tailored for
wide-area services. In fact, the one example where we deviated from
this principle--by changing the socket API to support safe raw
sockets [3]--proved to be an operational diaster
because the PlanetLab OS looked enough like Linux that any small
deviation caused disproportionate confusion.
Second, we leveraged existing software whereever possible. This was
for three reasons: (1) to improve the stability of the system; (2) to
lower the barrier-to-entry for the user community; and (3) to reduce
the amount of new code we had to implement and maintain. This last
point cannot be stressed enough. Even modest changes to existing
software packages have to be tracked as those packages are updated
over time. In our eagerness to reuse rather than invent, we made some
mistakes, the most notable of which is documented in the next
subsection.
Third, we adopted a well-established practice of rolling new releases
out incrementally. This is for the obvious reason--to build
confidence that the new release actually worked under realistic loads
before updating all nodes--but also for a reason that's somewhat
unique to PlanetLab: some long-running services maintain persistent
data repositories, but doing so depends on a minimal number of copies
being available at any time. Updates that reboot nodes must
happen incrementally if long-running storage services are to survive.
Note that while few would argue with these principles--and it is
undoubtedly the case that we would have struggled had we not adhered
to them--our experience is that many other factors (some
unexpected) had a significant impact on the stability of the system.
The rest of this section reports on these operational experiences.
We now chronicle our experience operating and evolving PlanetLab.
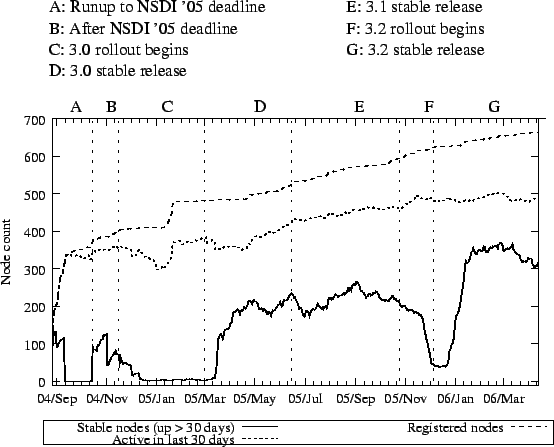
Figure 9 illustrates the availability of PlanetLab nodes
from September 2004 through April 2006, as inferred from CoMon. The
bottom line indicates the PlanetLab nodes that have been up
continuously for the last 30 days (stable nodes), the middle line is
the count of nodes that came online within the last 30 days, and the
top line is all registered PlanetLab nodes. Note that the difference
between the bottom and middle lines represents the ``churn'' of
PlanetLab over a month's time; and the difference between the middle
and top lines indciates the number of nodes that are offline. The
vertical lines in Figure 9 are important dates, and the
letters at the top of the graph let us refer to the intervals between
the dates.
Figure 9:
Node Availability
 |
There have clearly been problems providing the community with a stable
system. Figure 9 illustrates several reasons
for this:
- Sometimes instability stems from the community stressing the
system in new ways. In Figure 9, interval A is
the run-up to the NSDI'05 deadline. During this time, heavy use
combined with memory leaks in some experiments caused kernel panics
due to Out-of-Memory errors. This is the common behavior of Linux
when the system runs out of memory and swap space. pl_mom
(Section 4.2.2) was introduced in response to this experience.
- Software upgrades that require a reboot obviously effect the set
of stable nodes (e.g., intervals C and D), but installing
buggy software has a longer-term affect on stability. Interval C
shows the release of PlanetLab 3.0. Although the release had undergone
extensive off-line testing, it had bugs and a relatively long period
of instability followed. PlanetLab was still usable during this
period but nodes rebooted at least once per month.
- The pl_mom watchdog is not perfect. There is a slight
dip in the number of stable core nodes (bottom line) in interval D, when about 50 nodes were rebooted because of a slice with a fast
memory leak; as memory pressure was already high on those nodes, pl_mom could not detect and reset the slice before the nodes ran out
of memory.
We note, however, that the 3.2 software release from late
December 2005 is the best so far in terms of stability: as of February
2006, about two-thirds of active PlanetLab nodes have been up for at
least a month. We attribute most of this to abandoning CKRM in favor
of the Vservers native resource management framework and a new CPU
scheduler.
One surprising fact to emerge from Figure 9 is that a
lot of PlanetLab nodes are dead (denoted by the difference between the
top and middle lines). Research organizations gain access to
PlanetLab simply by hooking up two machines at their local site. This
formula for growth has worked quite well: a low barrier-to-entry
provided the right incentive to grow PlanetLab. However, there have
never been well-defined incentives for sites to keep nodes online.
Providing such incentives is obviously the right thing to do, but we
note that that the majority of the off-line nodes are at sites that no
longer have active slices--and at the time of this writing only 12
sites had slices but no functioning nodes--so it's not clear what
incentive will work.
Now that we have reached a fairly stable system, it becomes
interesting to study the ``churn'' of nodes that are active yet are
not included in the stable core. We find it useful to differentiate
between three categories of nodes: those that came up that day (and
stayed up), those that went down that day (and stayed down), and those
that have rebooted at least once. Our experience is that, on a typical
day, about 2 nodes come up, about 2 nodes go down, and about 4 nodes
reboot. On 10% of days, at least 6 nodes come up or go down, and at
least 8 nodes reboot.
Looking at the archives of the support and planetlab-users
mailing lists, we are able to identify the most common reasons nodes
come up or go down: (1) a site takes its nodes offline to move them or
change their network configuration, (2) a site takes its nodes offine
in response to a security incident, (3) a site accidently changes a
network configuration that renders its nodes unreachable, or (4) a
node goes offline due to a hardware failure. The last is the most
common reason for nodes being down for an extended period of time; the
third reason is the most frustrating aspect of operating a system that
embeds its nodes in over 300 independent IT organizations.
Of the operational issues that PlanetLab faces, responding to security
complaints is perhaps the most interesting, if only because of what
they say about the current state of the Internet. We comment on three
particular types of complaints.
The most common complaints are the result of IDS alerts. One frequent
scenario corresponds to a perceived DoS attack. These are sometimes
triggered by a poorly designed experiment (in which case the
responsible researchers are notified and expected to take corrective
action), but they are more likely to be triggered by totally innocent
behavior (e.g., 3 unsolicited UDP packets have triggered the threat of
legal action). In other cases, the alerts are triggered by simplistic
signitures for malware that could not be running on our Linux-based
environment. In general, we observe that any traffic that deviates
from a rather narrow range of acceptable behavior is increasingly
viewed as suspect, which makes innovating with new types of network
services a challenge.
An increasingly common type of complaint comes from home users
monitoring their firewall logs. They see connections to PlanetLab
nodes that they do not recognize, assume PlanetLab has installed
spyware on their machines, and demand that it be removed. In reality,
they have unknowingly used a service (e.g., a CDN) that has imposed
itself between them and a server. Receiving packets from a location
service that also probes the client to select the most appropriate
PlanetLab node to service a request only exacerbates the
situation [35,9]. The takeaway is
that even individual users are becoming increasingly security-senstive
(if less security-sophisticated than their professional counterparts),
which makes the task of deploying alternative services increasingly
problematic.
Finally, PlanetLab nodes are sometimes identified as the source or
sink of illegal content. In reality, the content is only cached on the
node by a slice running a CDN service, but an overlay node looks like
an end node to the rest of the Internet. PlanetLab staff use
PlanetFlow to identify the responsible slice, which in turn typically
maintains a log that can be used to identify the ultimate source or
destination. This information is passed along to the authorities, when
appropriate. While many hosting sites are justifiably gun-shy about
such complaints, the main lesson we have learned is that trying to
police content is not a viable solution. The appropriate approach is
to be responsive and cooperative when complaints are raised.
6 Discussion
Perhaps the most fundamental issue in PlanetLab's design is how to
manage trust in the face of pressure to decentralize the system, where
decentralization is motivated by the desire to (1) give owners
autonomous control over their nodes and (2) give third-party service
developers the flexibility they need to innovate.
At one end of the spectrum, individual organizations could establish
bilateral agreements with those organizations that they trust, and
with which they are willing to peer. The problem with such an approach
is that reaching the critical mass needed to foster a large-scale
deployment has always proved difficult. PlanetLab started at the other
end of the spectrum by centralizing trust in a single
intermediary--PLC--and it is our contention that doing so was
necessary to getting PlanetLab off the ground. To compensate, the plan
was to decentralize the system through two other means: (1) users
would delegate the right to manage aspects of their slices to
third-party services, and (2) owners would make resource allocation
decisions for their nodes. This approach has had mixed success, but it
is important to ask if these limitations are fundamental or simply a
matter of execution.
With respect to owner autonomy, all sites are allowed to set bandwidth
caps on their nodes, and sites that have contributed more than the
two-node minimum required to join PlanetLab are allowed to give excess
resources to favored slices, including brokerage services that
redistribute those resources to others. In theory, sites are also
allowed to blacklist slices they do not want running locally (e.g.,
because they violate the local AUP), but we have purposely not
advertised this capability in an effort to ``unionize'' the research
community: take all of our experiments, even the risky ones, or take
none of them. (As a compromise, some slices voluntarily do not run on
certain sites so as to not force the issue.) The interface by which
owners express their wishes is clunky (and sometimes involves
assistance from the PlanetLab staff), but there does not seem to be
any architectural reason why this approach cannot provide whatever
control over resource allocation that owners require (modulo meeting
requirements for joining PlanetLab in the first place).
With respect to third-party management services, success has been much
more mixed. There have been some successes--Stork, Sirius, and CoMon
being the most notable examples--but this issue is a contentious one
in the PlanetLab developer community. There are many possible
explanations, including there being few incentives and many costs to
providing 24/7 management services; users preferring to roll their own
management utilities rather than learn a third-party service that
doesn't exactly satisfy their needs; and the API being too much of a
moving target to support third-party development efforts.
While these possibilities provide interesting fodder for debate, there
is a fundamental issue of whether the centralized trust model impacts
the ability to deploy third-party management services. For those
services that require privileged access on a node (see
Section 3.5) the answer is yes--the PLC support staff
must configure Proper to grant the necessary privilege(s). While in
practice such privileges have been granted in all cases that have not
violated PlanetLab's underlying trust assumptions or jeopardized the
stability of the operational system, this is clearly a limitation of
the architecture.
Note that choice is not just limited to what management services the
central authority approves, but also to what capabilities are included
in the core system--e.g., whether each node runs Linux, Windows, or
Xen. Clearly, a truly scalable system cannot depend on a single
trusted entity making these decisions. This is, in fact, the
motivation for evolving PlanetLab to the point that it can support
federation. To foster federation we have put together a software
distribution, called MyPLC, that allows anyone to create their own
private PlanetLab, and potentially federate that PlanetLab with others
(including the current ''public'' PlanetLab).
This returns us to the original issue of centralized versus
decentralized trust. The overriding lesson of PlanetLab is that a
centralized trust model was essential to achieving some level of
critical mass--which in turn allowed us to learn enough about the
design space to define a candidate minimal interface for
federation--but that it is only by federating autonomous instances
that the system will truly scale. Private PlanetLabs will still need
bilateral peering agreements with each other, but there will also be
the option of individual PlanetLabs scaling internally to non-trivial
sizes. In other words, the combination of bilateral agreements and
trusted intermediaries allows for flexible aggregation of trust.
Building PlanetLab has been a unique experience. Rather than
leveraging a new mechanism or algorithm, it has required a synthesis
of carefully selected ideas. Rather than being based on a
pre-conceived design and validated with controlled experiments, it has
been shaped and proven through real-world usage. Rather than be
designed to function within a single organization, it is a large-scale
distributed system that must be cognizant of its place in a
multi-organization world. Finally, rather than having to satisfy only
quantifiable technical objectives, its success has depended on
providing various communities with the right incentives and being
equally responsive to conflicting and difficult-to-measure requirements.
Many people have contributed to PlanetLab. Timothy Roscoe, Tom
Anderson, and Mic Bowman have provided significant input to the
definition of its architecture. Several researchers have also
contributed management services, including David Lowenthal, Vivek Pai
and KyoungSoo Park, John Hartman and Justin Cappos, and Jay Lepreau
and the Emulab team. Finally, the contributions of the PlanetLab staff
at Princeton--Aaron Klingaman, Mark Huang, Martin Makowiecki, Reid
Moran, and Faiyaz Ahmed--have been immeasurable.
We also thank the anonymous referees, and our shepherd, Jim Waldo, for
their comments and help in improving this paper.
This work was funded in part by NSF Grants CNS-0520053, CNS-0454278,
and CNS-0335214.
- 1
-
ANNAPUREDDY, S., FREEDMAN, M. J., AND MAZIERES, D.
Shark: Scaling File Servers via Cooperative Caching.
In Proc.nd NSDI (Boston, MA, May 2005).
- 2
-
AUYOUNG, A., CHUN, B., NG, C., PARKES, D., SHNEIDMAN, J., SNOEREN, A., AND
VAHDAT, A.
Bellagio: An Economic-Based Resource Allocation System for
PlanetLab.
https://bellagio.ucsd.edu/about.php.
- 3
-
BAVIER, A., BOWMAN, M., CULLER, D., CHUN, B., KARLIN, S., MUIR, S.,
PETERSON, L., ROSCOE, T., SPALINK, T., AND WAWRZONIAK, M.
Operating System Support for Planetary-Scale Network Services.
In Proc.st NSDI (San Francisco, CA, Mar 2004).
- 4
-
BAVIER, A., FEAMSTER, N., HUANG, M., PETERSON, L., AND REXFORD, J.
In VINI Veritas: Realistic and Controlled Network Experimentation.
In Proc. SIGCOMM 2006 (Pisa, Italy, Sep 2006).
- 5
-
BRETT, P., KNAUERHASE, R., BOWMAN, M., ADAMS, R., NATARAJ, A., SEDAYAO,
J., AND SPINDEL, M.
A Shared Global Event Propagation System to Enable Next Generation
Distributed Services.
In Proc.st WORLDS (San Francisco, CA, Dec 2004).
- 6
-
CLARK, D. D.
The Design Philosophy of the DARPA Internet Protocols.
In Proc. SIGCOMM '88 (Stanford, CA, Aug 1988),
pp. 106-114.
- 7
-
DAVID LOWENTHAL.
Sirius: A Calendar Service for PlanetLab.
https://snowball.cs.uga.edu/dkl/pslogin.php.
- 8
-
FREEDMAN, M. J., FREUDENTHAL, E., AND MAZIERES, D.
Democratizing content publication with Coral.
In Proc.st NSDI (San Francisco, CA, Mar 2004).
- 9
-
FREEDMAN, M. J., LAKSHMINARAYANAN, K., AND MAZIERES, D.
OASIS: Anycast for Any Service.
In Proc.rd NSDI (San Jose, CA, May 2006).
- 10
-
FU, Y., CHASE, J., CHUN, B., SCHWAB, S., AND VAHDAT, A.
SHARP: An Architecture for Secure Resource Peering.
In Proc.9th SOSP (Lake George, NY, Oct 2003).
- 11
-
HUANG, M., BAVIER, A., AND PETERSON, L.
PlanetFlow: Maintaining Accountability for Network Services.
ACM SIGOPS Operating Systems Review 40, 1 (Jan 2006).
- 12
-
JUSTON CAPPOS AND JOHN HARTMAN.
Stork: A Software Packagement Management Service for PlanetLab.
https://www.cs.arizona.edu/stork.
- 13
-
KOHLER, E., MORRIS, R., CHEN, B., JANNOTTI, J., AND KAASHOEK, M. F.
The Click Modular Router.
ACM Transactions on Computer Systems 18, 3 (Aug 2000),
263-297.
- 14
-
LAI, K., RASMUSSON, L., ADAR, E., SORKIN, S., ZHANG, L., AND HUBERMAN,
B. A.
Tycoon: An Implemention of a Distributed Market-Based Resource
Allocation System.
Tech. Rep. arXiv:cs.DC/0412038, HP Labs, Palo Alto, CA, USA, Dec.
2004.
- 15
-
LINUX ADVANCED ROUTING AND TRAFFIC CONTROL.
https://lartc.org/.
- 16
-
LINUX VSERVERS PROJECT.
https://linux-vserver.org/.
- 17
-
MUIR, S., PETERSON, L., FIUCZYNSKI, M., CAPPOS, J., AND HARTMAN, J.
Proper: Privileged Operations in a Virtualised System Environment.
Tech. Rep. PDN-05-027, PlanetLab Consortium, 2005.
- 18
-
OPPENHEIMER, D., ALBRECH, J., PATTERSON, D., AND VAHDAT, A.
Distributed Resource Discovery on PlanetLab with SWORD.
In Proc.st WORLDS (San Francisco, CA, 2004).
- 19
-
PARK, K., AND PAI, V. S.
Scale and Performance in the CoBlitz Large-File Distribution
Service.
In Proc.rd NSDI (San Jose, CA, May 2006).
- 20
-
PARK, K., PAI, V. S., PETERSON, L. L., AND WANG, Z.
CoDNS: Improving DNS Performance and Reliability via Cooperative
Lookups.
In Proc.th OSDI (San Francisco, CA, Dec 2004),
pp. 199-214.
- 21
-
PETERSON, L., ANDERSON, T., CULLER, D., AND ROSCOE, T.
A Blueprint for Introducing Disruptive Technology into the
Internet.
In Proc. HotNets-I (Princeton, NJ, Oct 2002).
- 22
-
PETERSON, L., BAVIER, A., FIUCZYNSKI, M., MUIR, S., AND ROSCOE, T.
PlanetLab Architecture: An Overview.
Tech. Rep. PDN-06-031, PlanetLab Consortium, Apr 2006.
- 23
-
RAMASUBRAMANIAN, V., PETERSON, R., AND SIRER, E. G.
Corona: A High Performance Publish-Subscribe System for the World
Wide Web.
In Proc.rd NSDI (San Jose, CA, May 2006).
- 24
-
RAMASUBRAMANIAN, V., AND SIRER, E. G.
Beehive: O(1) Lookup Performance for Power-Law Query Distributions
in Peer-to-Peer Overlays.
In Proc.st NSDI (San Francisco, CA, Mar 2004),
pp. 99-112.
- 25
-
RAMASUBRAMANIAN, V., AND SIRER, E. G.
The Design and Implementation of a Next Generation Name Service for
the Internet.
In Proc. SIGCOMM 2004 (Portland, OR, Aug 2004),
pp. 331-342.
- 26
-
RHEA, S., GODFREY, B., KARP, B., KUBIATOWICZ, J., RATNASAMY, S., SHENKER,
S., STOICA, I., AND YU, H.
OpenDHT: A Public DHT Service and its Uses.
In Proc. SIGCOMM 2005 (Philadelphia, PA, Aug 2005),
pp. 73-84.
- 27
-
RITCHIE, D. M., AND THOMPSON, K.
The UNIX Time-Sharing System.
Communications of the ACM 17, 7 (Jul 1974), 365-375.
- 28
-
RYAN HUEBSCH.
PlanetLab Application Manager.
https://appmanager.berkeley.intel-research.net/.
- 29
-
SPRING, N., BAVIER, A., PETERSON, L., AND PAI, V. S.
Using PlanetLab for Network Research: Myths, Realities, and Best
Practices.
In Proc.nd WORLDS (San Francisco, CA, Dec 2005).
- 30
-
SPRING, N., WETHERALL, D., AND ANDERSON, T.
Scriptroute: A Public Internet Measurement Facility.
In Proc.th USITS (Seattle, WA, Mar 2003).
- 31
-
VIVEK PAI AND KYOUNGSOO PARK.
CoMon: A Monitoring Infrastructure for PlanetLab.
https://comon.cs.princeton.edu.
- 32
-
WALDSPURGER, C. A., AND WEIHL, W. E.
Lottery Scheduling: Flexible Proportional-Share Resource
Management.
In Proc.st OSDI (Monterey, CA, Nov 1994), pp. 1-11.
- 33
-
WANG, L., PARK, K., PANG, R., PAI, V. S., AND PETERSON, L. L.
Reliability and Security in the CoDeeN Content Distribution
Network.
In Proc. USENIX '04 (Boston, MA, Jun 2004).
- 34
-
WHITE, B., LEPREAU, J., STOLLER, L., RICCI, R., GURUPRASAD, S., NEWBOLD,
M., HIBLER, M., BARB, C., AND JOGLEKAR, A.
An Integrated Experimental Environment for Distributed Systems and
Networks.
In Proc.th OSDI (Boston, MA, Dec 2002), pp. 255-270.
- 35
-
WONG, B., SLIVKINS, A., AND SIRER, E. G.
Meridian: A Lightweight Network Location Service without Virtual
Coordinates.
In Proc. SIGCOMM 2005 (Philadelphia, PA, Aug 2005).
- 36
-
ZHANG, M., ZHANG, C., PAI, V. S., PETERSON, L. L., AND WANG, R. Y.
PlanetSeer: Internet Path Failure Monitoring and Characterization in
Wide-Area Services.
In Proc.th OSDI (San Francisco, CA, Dec 2004),
pp. 167-182.
|

